Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
KINEMATYKA MANIPULATORÓW I ROBOTÓW
PRZYKŁAD

3
oraz wartości przemieszczeń:
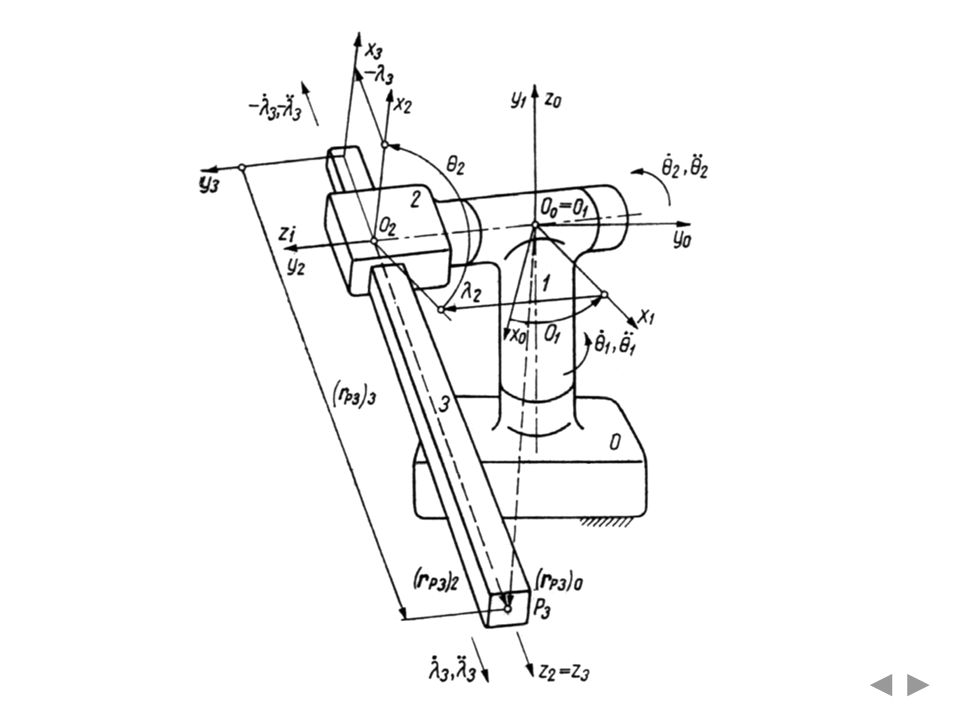
Manipulator robota stanfordzkiego przedstawiony na rysunku ma dwie pary obrotowe i jedną przesuwną (OOP). Dane są wymiary i parametry ogniw: (rys. ***) α1 = 90°, l1 = 0, α2 = 90°, l2 = 0, λ1 = 0, λ2 = 0.05m, oraz wartości przemieszczeń: θ1 = 0°, θ2 = - 90°, λ3 = -0.2m, prędkości: i przyspieszeń: w ruchu względnym członów.
. Dane są wymiary i parametry ogniw: (rys. ***) α1 = 90°, l1 = 0, α2 = 90°, l2 = 0, λ1 = 0, λ2 = 0.05m, oraz wartości przemieszczeń: θ1 = 0°, θ2 = - 90°, λ3 = -0.2m, prędkości: i przyspieszeń: w ruchu względnym członów.")
4
Wyznaczyć prędkość przyspieszenie punktu P3 należącego do ogniwa 3, którego położenie w układzie współrzędnych tego ogniwa wyznacza wektor SPOSÓB 1 Rozwiązanie zadania rozpoczyna się od obliczenia macierzy przekształceń według wzoru

5
w przypadku gdy i = 1, 2, 3 Po podstawieniu danych liczbowych otrzymuje się

6
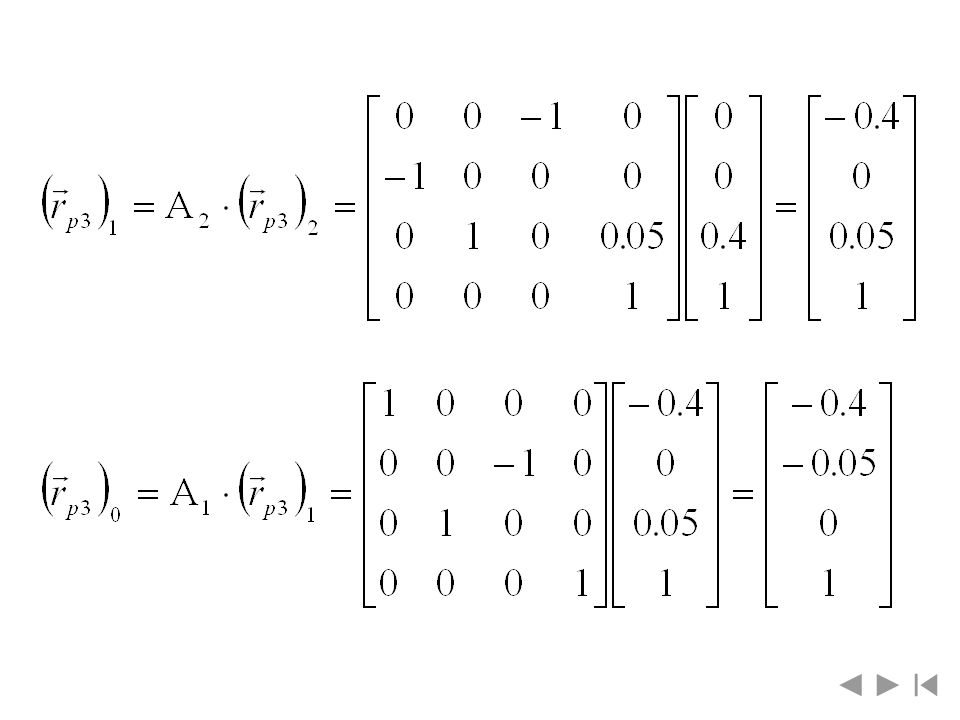
Wektory położenia punktu P3 w układach współrzędnych ogniw 2, 1 i 0, czyli podstawy oblicza się według (wzorów na r) czyli
 czyli.")
8
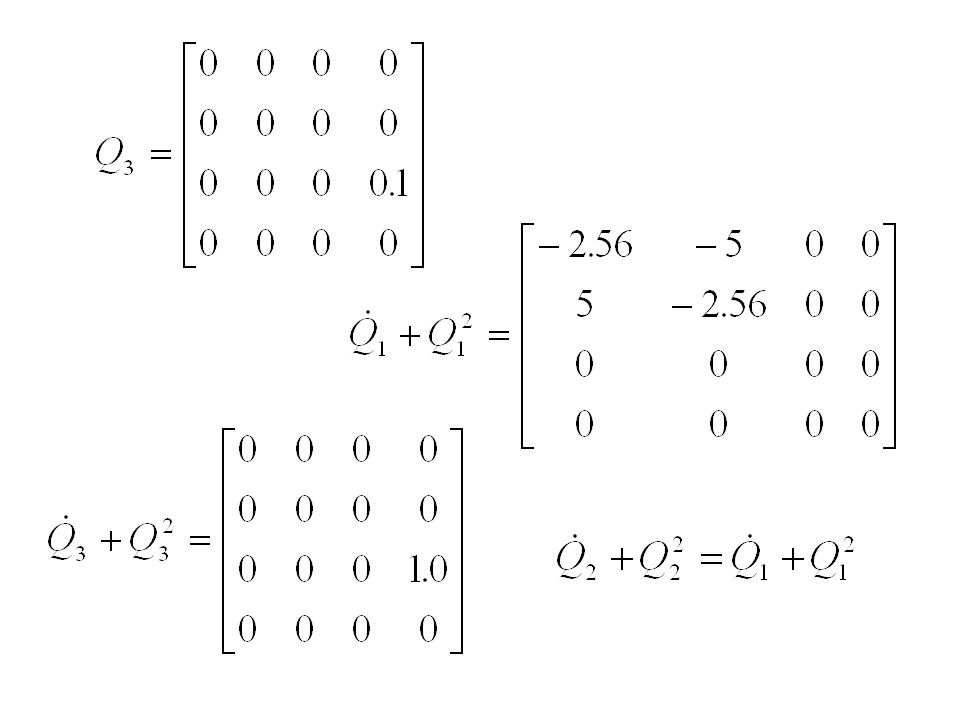
Uwzględniając wzory

9
natomiast w przypadku pary przesuwnej
a zatem

11
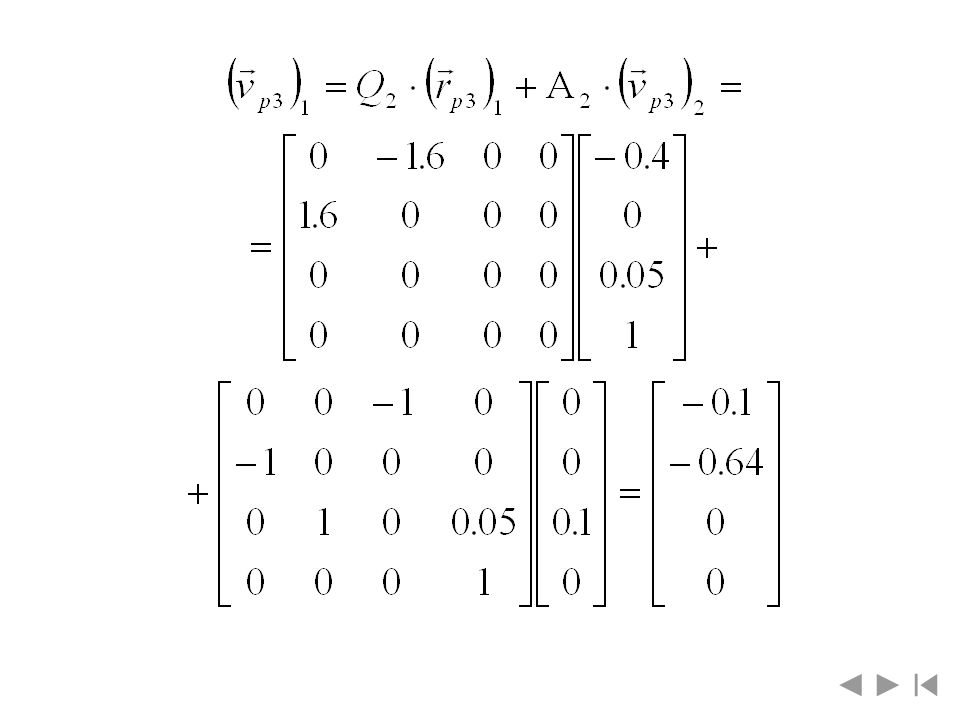
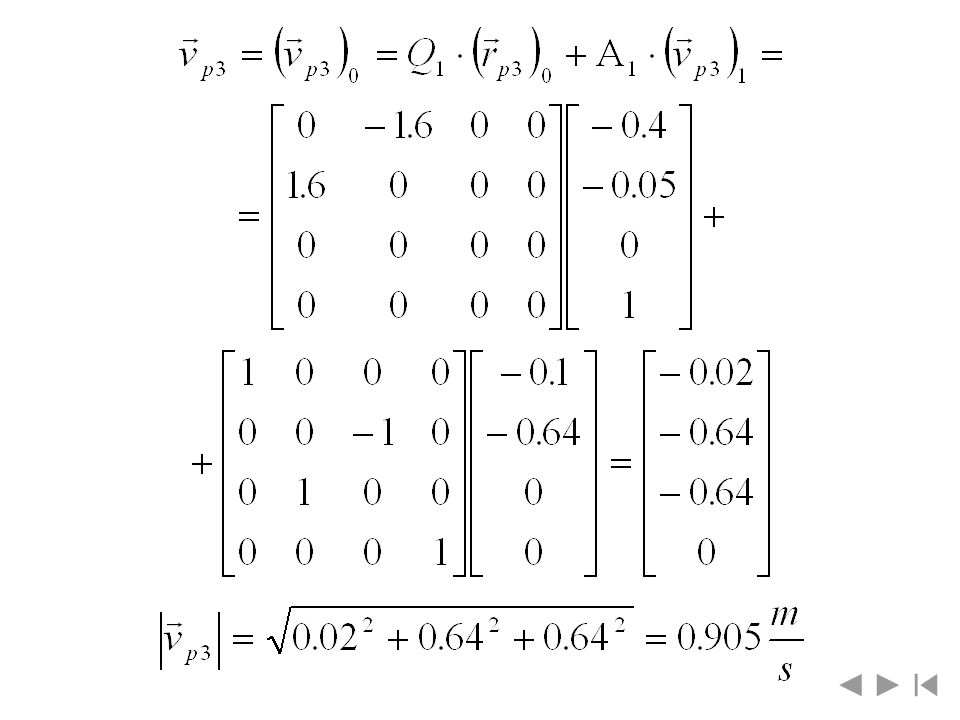
wektory prędkości punktu P3 wyznacza się zgodnie ze wzorami na prędkości – (wzory na v)1 – czyli
1 – czyli")
14
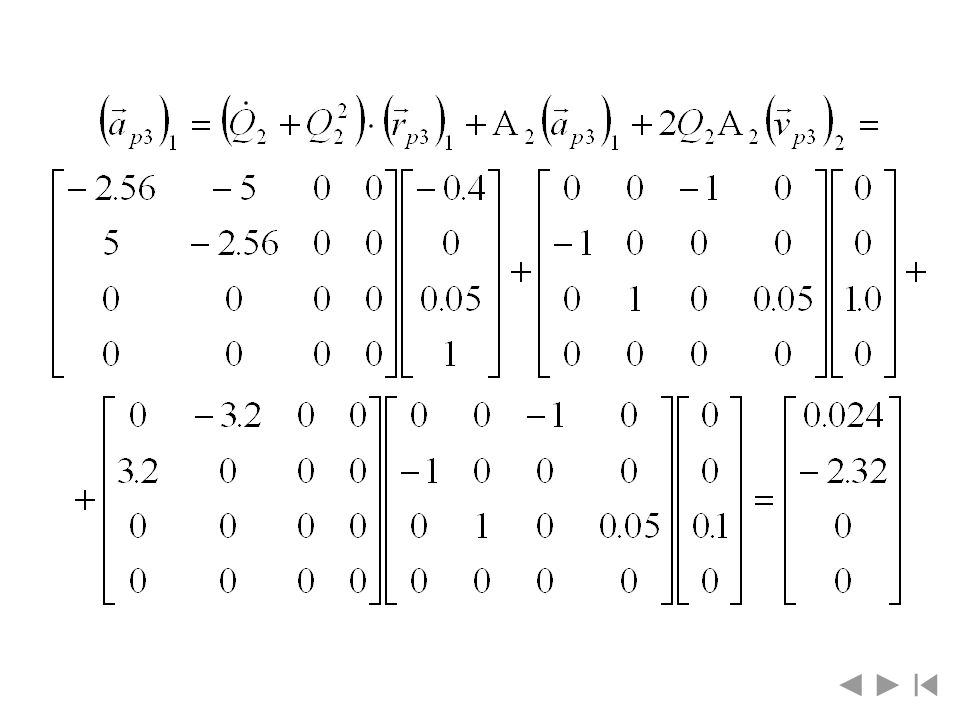
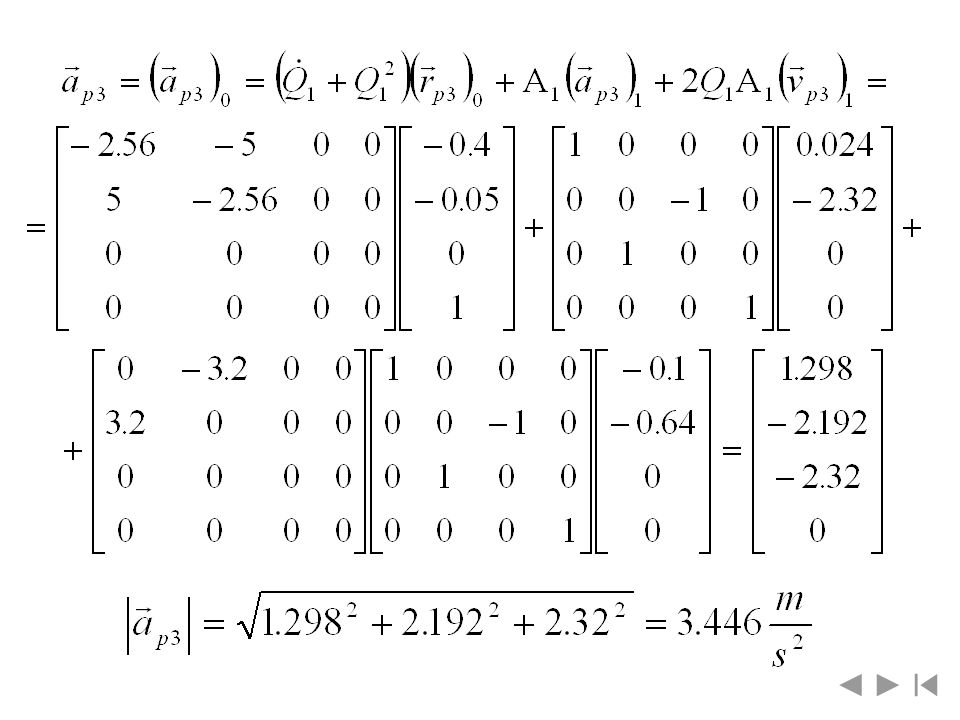
natomiast wektory przyspieszeń punktu P3 wyznacza się zgodnie ze wzorami na przyspieszenia
(wzory na a)1 czyli
1. czyli.")
17
Wektory prędkości kątowej ogniw wyznacza się ze (wzorów na prędkość kątową) jako
 jako")
18
wektory przyspieszenia kątowego ogniw wyznacza się ze (wzorów na przyspieszenia kątowe) jako
 jako")
19
θ1(t), θ2(t), λ3(t) Sposób 2 Współrzędne wektorów - prędkości
- przyspieszenia punktu P3 można również wyznaczyć w inny sposób. Współrzędne wektora - położenia punktu P3 rozpatruje się jako funkcje złożone zmiennych θ1(t), θ2(t), λ3(t)
, θ2(t), λ3(t)")
20
Pierwsze pochodne współrzędnych wektora położenia względem czasu są równe współrzędnym wektora prędkości, a drugie pochodne wektora przyspieszenia ze wzoru wyznacza się

21
Mnożąc poszczególne macierze począwszy od prawej strony otrzymuje się

22
Podstawiając powyższą zależność do równania
i wykonując mnożenie macierzy przez wektor

23
otrzymuje się Podstawiając wartości liczbowe do powyższej zależności otrzymuje się wynik identyczny jak poprzednio, czyli

24
Pierwsze pochodne współrzędnych wektora
są równe współrzędnym wektora prędkości

25
Po podstawieniu wartości kątów
oraz wartości prędkości

26
czyli wynik zgodny z otrzymanym poprzednio innym sposobem
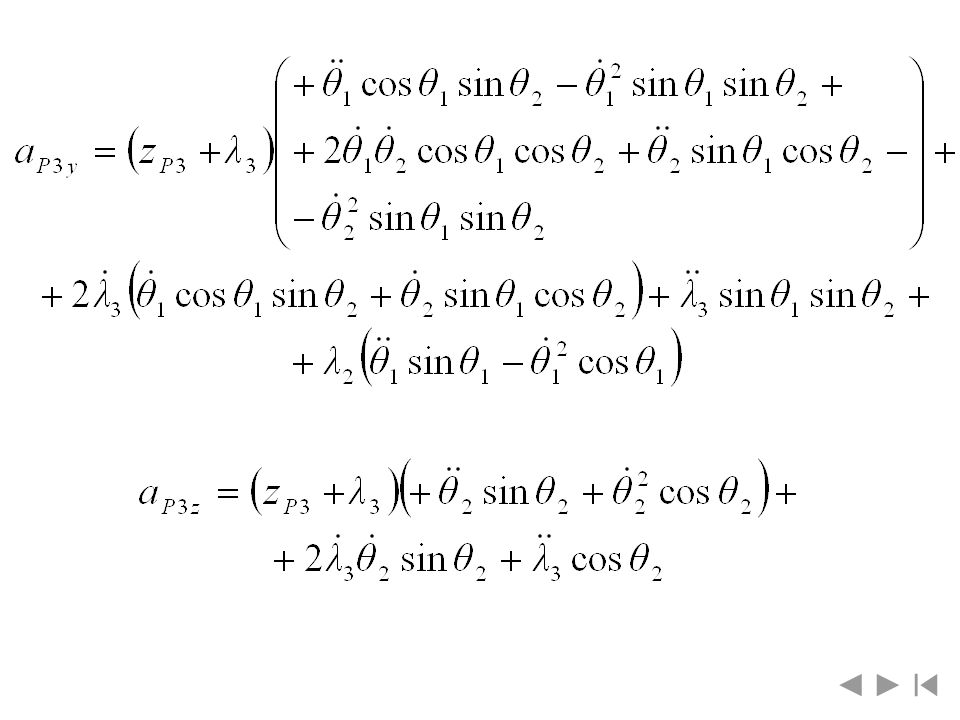
Pochodne względem czasu współrzędnych wektora prędkości są równe współrzędnym wektora przyspieszenia

28
Po podstawieniu danych liczbowych do wzorów na współrzędne przyspieszeń obliczone powyżej otrzymuje się

29
PODSUMOWANIE W rozwiązaniu zadania z przedstawionego przykładu pokazano zastosowanie dwóch sposobów obliczeń współrzędnych wektora położenia, prędkości i przyspieszenia punktu, leżącego na ogniwie ruchomym. Pierwszy sposób oparty na wzorach rekurencyjnych (wzory na r) (wzory na v) (wzory na a) przy wykorzystaniu operatorów różniczkowania (wzory na Q) jest bardziej przydatny do obliczeń na PC
 (wzory na v) (wzory na a) przy wykorzystaniu operatorów różniczkowania. (wzory na Q) jest bardziej przydatny do obliczeń na PC.")
30
Drugi sposób wymaga pracochłonnego różniczkowania analitycznego jest bardziej przydatny w przypadku manipulatorów o małej liczbie członów; jego zaletą jest mniejsza liczba operacji algebraicznych aniżeli w przypadku pierwszym. Uwaga: Przy wyznaczaniu przemieszczeń liniowych i kątowych trzeba najpierw zdefiniować zwroty odpowiednich wektorów; zwrot przemieszczenia uważa się za dodatni, jeśli obrót układu i – 1 do układu i odbywa się zgodnie z regułą śruby prawoskrętnej; zwroty wektorów prędkości i przyspieszeń przyjmuje się za dodatnie, jeśli są one zgodne ze zwrotami odpowiednich przemieszczeń.

31
Podana wyżej metoda macierzowa kinematyki manipulatora robota stanfordzkiego dotyczy tak zwanego zagadnienia prostego, czyli wyznaczania położeń i orientacji członu roboczego odpowiadających danym przemieszczeniom w parach kinematycznych. Rozwiązanie zadania odwrotnego to znaczy wyznaczenie przemieszczeń w parach kinematycznych odpowiadających żądanym położeniom i orientacji ogniwa roboczego. Wariant zadania odwrotnego jest bardziej skomplikowany i sprowadza się do rozwiązania zadania położenia odpowiedniego mechanizmu przestrzennego manipulatora robota (por. zadanie na położenia na początku niniejszego rozdziału).
..")
Podobne prezentacje