Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
dr hab. Ewa Popko pok. 231a www.if.pwr.wroc.pl/~popko e-mail:
2
Podręczniki D.Halliday, R.Resnick, J.Walker; Podstawy Fizyki tom 1 i 2
W.I Sawieliew; Wykłady z Fizyki tom I H.D. Young, R.A. Freedman; University Physics, K.Jezierski, B.Kołodka, K.Sierański; Wzory i Prawa z Objaśnieniami, część I K.Jezierski, B.Kołodka, K.Sierański; Zadania z Rozwiązaniami, część I

4
wielkości fizycznych :
1.Modele matematyczne wielkości fizycznych :

5
2. Pomiar Jest to procedura przypisująca wielkość matematyczną wielkości fizycznej. Polega on na porównaniu pewnej wielkości z wielkością standardową.

6
3. Jednostki Układ jednostek SI: m, kg, s, mol femto- 10-15
micro kilo mega pico mili giga nano centi

7
4. Skalary Wielkość skalarna podlega tym samym zasadom, co kombinacja liczb. Każdy skalar jest reprezentowany przez pewną liczbę 3 + 2 = 5

8
Czas - wielkość skalarna związana ze zmianami we wszechświecie.
(W SI jedna sekunda jest zdefiniowana jako okres oscylacji określonej linii spektralnej atomu Cs133

9
Odległość - skalar związany ze względnym położeniem dwóch punktów.
(W SI jeden metr jest zdefiniowany jako odległość jaką przebywa światło w próżni w czasie 1/299,792,458 sekundy) s 0
 s 0.")
11
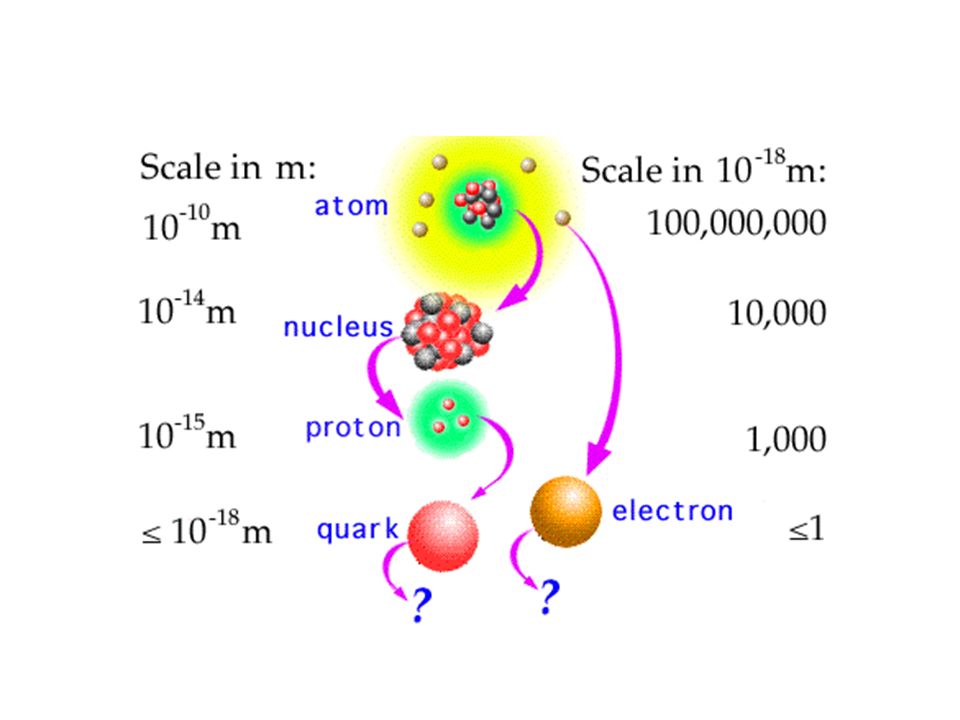
1026 1024 1021 1018 1016 1013 1011 108 104 100 10-3 10-6 10-9 10-10 10-12 10-15 10-18 10-35

12
Masa - skalar określający bezwładność ciała, czyli ‘opór' na zmianę ruchu. (W SI jeden kilogram = masie wzorca ze stopu platyny i irydu, przechowywanym w International Bureau of Weights and Measures w Sevres

13
Długość - skalar związany z rozmiarami obiektów

14
WEKTORY 1- geometrycznie: element zorientowany 2- algebraicznie:
zbiór liczb Rn A = [A1, A2, A3] AB B = [B1, B2, B3] B A A AB = [A1+B1, A2+ B2, A3+ B3] A = [A1, A2, A3] Elementy zbioru V dla którego zdefiniowano 2 operacje: wewnętrzną i zewnętrzną (mnożenie przez liczbę), są zwane wektorami wszystkie osiem warunków jest spełnione:
, są zwane wektorami wszystkie osiem warunków jest spełnione:")
15
Prawo łączności dodawania
jeśli a,b,c V to a ( b c ) = ( a b) c (AB)C A(BC) A(BC) BC AB B C A
 = ( a b) c. (AB)C. A(BC) A(BC) BC. AB. B. C. A.")
16
Element zerowy Istnieje taki element 0 V że dla każdego a V, a 0 = a. 1 2 [A1,A2,A3] [0,0,0] = = [(A1+0), (A2+0), (A3+0)] = = [A1,A2,A3]
![Element zerowy Istnieje taki element 0 V że dla każdego a V, a 0 = a [A1,A2,A3] [0,0,0] =](http://slideplayer.pl/slide/418599/1/images/16/Element+zerowy+Istnieje+taki+element+0+%EF%83%8EV+%C5%BCe+dla+ka%C5%BCdego+a+%EF%83%8EV%2C+a+%EF%83%85+0+%3D+a+%5BA1%2CA2%2CA3%5D%EF%83%85+%5B0%2C0%2C0%5D+%3D.jpg "= [(A1+0), (A2+0), (A3+0)] = = [A1,A2,A3]")
17
Element odwrotny Dla każdego aV istnieje (-a) V taki że a (-a)=0 1
A -A 2 [A1,A2,A3] [-A1,-A2,-A3] = = [A1+(-A1), A2+(-A2), A3+(- A3)] = = [0,0,0]
, A2+(-A2), A3+(- A3)] = = [0,0,0]")
18
Prawo przemienności dodawania
jeśli a, b V to a b = b a 1 2 BA AB AB [A1,A2,A3][B1,B2,B3]= = [(A1+B1), (A2+B2), (A3+B3)] = = [(B1+A1), (B2+A2), (B3+A3)] = = [B1,B2,B3] [A1,A2,A3] B A
, (A2+B2), (A3+B3)] = = [(B1+A1), (B2+A2), (B3+A3)] = = [B1,B2,B3] [A1,A2,A3] B. A.")
19
Prawo łączności mnożenia
jeśli R i a V to ( a ) = () a 1 2 A ([A1,A2,A3]) = = [(A1), (A2), (A3)]= = [(A1), (A2), (A3)]= =[()A1, ()A2, ()A3)]= =() [A1,A2,A3] A (A) (A) ()A)
 = () a A. ([A1,A2,A3]) = = [(A1), (A2), (A3)]= = [(A1), (A2), (A3)]= =[()A1, ()A2, ()A3)]= =() [A1,A2,A3] A. (A) (A) ()A)")
20
Element jednostkowy Dla każdego a V, 1 a = a 1 2 1 [A1,A2,A3] = A
![Element jednostkowy Dla każdego a V, 1 a = a [A1,A2,A3] = A](http://slideplayer.pl/slide/418599/1/images/20/Element+jednostkowy+Dla+ka%C5%BCdego+a+%EF%83%8EV%2C+1+%EF%82%B7+a+%3D+a+%EF%82%B7+%5BA1%2CA2%2CA3%5D+%3D+A.jpg "Element jednostkowy Dla każdego a V, 1 a = a [A1,A2,A3] = A")
21
Prawo rozdzielności mnożenia względem dodawania
jeśli R, a,b V to (a b) = ( a) ( b) 1 2 ( A)( B) ( B) ([A1,A2,A3][B1,B2,B3]) = = [(A1+B1), (A2+B2), (A3+B3)] = = [(A1+B1), (A2+B2), (A3+B3)] = = [A1+B1, A2+B2, A3+B3] = = ([A1, A2, A3][B1, B2, B3])= = [A1,A2,A3] [B1,B2,B3] (AB) (AB) B ( A) A
 = ( a) ( b) ( A)( B) ( B) ([A1,A2,A3][B1,B2,B3]) = = [(A1+B1), (A2+B2), (A3+B3)] = = [(A1+B1), (A2+B2), (A3+B3)] = = [A1+B1, A2+B2, A3+B3] = = ([A1, A2, A3][B1, B2, B3])= = [A1,A2,A3] [B1,B2,B3] (AB) (AB) B. ( A) A.")
22
Prawo rozdzielności dodawania względem mnożenia
if ,R, aV then (+) a = ( a) ( a) 1 (+) a ( a) ( a) ( a) ( a) 2 A (+)[A1,A2,A3] = = [(+)A1,(+)A2,(+)A3] = = [(A1+A1),(A2+A2),(A3+A3)]= = [A1,A2,A3] [A1,A2,A3] = = [A1,A2,A3] [A1,A2,A3] A A
 a = ( a) ( a) 1. (+) a. ( a) ( a) ( a) ( a) 2. A. (+)[A1,A2,A3] = = [(+)A1,(+)A2,(+)A3] = = [(A1+A1),(A2+A2),(A3+A3)]= = [A1,A2,A3] [A1,A2,A3] = = [A1,A2,A3] [A1,A2,A3] A. A.")
23
Wielkości wektorowe Wielkość która spełnia ww. jest wielkością wektorową. Każda wielkość wektorowa może być reprezentowana przez wektor, ale nie może być reprezentowana przez liczbę.

24
Baza Najmniejszy zbiór wektorów {e1,… en}V nazywa się bazą przestrzeni wektorowej, wtedy i tylko wtedy gdy każdy wektor x może być reprezentowany jako liniowa kombinacja wektorów bazy: Wektor skladowy Moduł wektora składowego Wymiar przestrzeni = liczbie elementów bazy.

25
Element zorientowany trójce liczb (Układ Kartezjański)
Ax Ay Az z Az = Az k A A = (Ax i) (Ay j) (Az k ) k Ay = Ay j y i j Ax = Ax i x
 (Ay j) (Az k ) k. Ay = Ay j. y. i. j. Ax = Ax i. x.")
26
Iloczyn skalarny wielkości wektorowych
Iloczyn skalarny wielkości wektorowych definiuje się poprzez iloczyn skalarny wektorów je reprezentujących.

27
Iloczyn skalarny - geometrycznie
b B gdzie a i b są długościami wektorów a jest kątem miedzy nimi A a Np: iloczyn skalarny dwóch wersorów prostopadłych;

28
Kąt między wektorami Kąt miedzy dwoma wektorami jest zdefiniowany przez iloczyn skalarny y = 45 x np: Znajdź kąt między [2,0] and [1,1].

29
Iloczyn skalarny w Rn np: [1,-1,2] ○ [2,3,0] = 1·2 + (-1)·3 + 2·0 = -1
![Iloczyn skalarny w Rn np: [1,-1,2] ○ [2,3,0] = 1·2 + (-1)·3 + 2·0 = -1](http://slideplayer.pl/slide/418599/1/images/29/Iloczyn+skalarny+w+Rn+np%3A+%5B1%2C-1%2C2%5D+%E2%97%8B+%5B2%2C3%2C0%5D+%3D+1%C2%B72+%2B+%28-1%29%C2%B73+%2B+2%C2%B70+%3D+-1.jpg "Iloczyn skalarny w Rn np: [1,-1,2] ○ [2,3,0] = 1·2 + (-1)·3 + 2·0 = -1")
30
Długość wektora=moduł=wartość bezwzględna
Jest to liczba zdefiniowana przez iloczyn skalarny: np: geometrycznie A a

31
Iloczyn skalarny - właściwości
a ○ b = b ○ a (przemienność) ( a) ○ b = (a ○ b) (łączność) (a b) ○ c = (a ○ c) + (b ○ c) (rozdzielność) a ○ a 0; a ○ a = 0 a = 0
 ( a) ○ b = (a ○ b) (łączność) (a b) ○ c = (a ○ c) + (b ○ c) (rozdzielność) a ○ a 0; a ○ a = 0 a = 0.")
32
Rzut wektora Dla dowolnego wektora i wektora jednostk. , wektor
Jest zwany rzutem wektora na kierunek wektora np A a Ax = ( a cos ) Ax = ( a ·1· cos ) • i x i Ax Ax
 Ax. = ( a ·1· cos ) • i. x. i. Ax. Ax.")
33
Twierdzenie Suma rzutów wektora we wszystkich kierunkach prostopadłych jest równa wektorowi. Rzuty stanowią składowe wektora

34
Składowe Np.: przestrzeń 2D Ax = A ○ i = = A 1 cos = A cos y
Ay A Ax = A cos i Ay Ay = A cos = A sin x Ay = A sin j Ax Ax

35
Dodawanie wektorów

36
Iloczyn wektorowy C C = ABsin A B
Iloczynem wektorowym A x B jest wektor C, którego moduł jest równy C = ABsin i który jest prostopadły do płaszczyzny na której leżą A i B. Zwrot wektora C określa reguła prawej dłoni ( śruby prawoskrętnej) A B
 A. B.")
37
Iloczyn wektorowy Można go obliczyć metodą wyznacznika:

38
Twierdzenia nieprzemienny Rozdzielność ze względu na dodawanie
różniczkowanie Użyteczna tożsamość

39
Transformacja wektora przy obrocie układu współrzędnych.
Transormacja wektora

Podobne prezentacje










 kierunek>")




 natężeń pól elektrycznego i magnetycznego rozchodzą się w przestrzeni (w próżni lub w ośrodkach materialnych) w postaci fal elektromagnetycznych.>")



