Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Modelowanie – Analiza – Synteza
Teoria sterowania – dziedzina wiedzy zajmująca się metodami analizy systemów sterowania (metodologiami badania cech systemów sterowania) oraz syntezy praw sterowania (metodologiami konstruowania struktur i algorytmów sterowników/regulatorów) Szerzej widziana treść teorii sterowania Modelowanie – Analiza – Synteza Ustalenie cech systemu Badanie cech systemu Nadawanie pożądanych cech systemowi
 oraz syntezy praw sterowania (metodologiami konstruowania struktur i algorytmów sterowników/regulatorów) Szerzej widziana treść teorii sterowania. Modelowanie – Analiza – Synteza. Ustalenie cech systemu. Badanie cech systemu. Nadawanie pożądanych cech systemowi.")
2
System sterowania Coś co celowo oddziałuje – układ sterujący
Sterowanie to celowe oddziaływanie czegoś/kogoś na coś/kogoś Coś co celowo oddziałuje – układ sterujący Coś na co wywierane jest celowe oddziaływanie – obiekt sterowany Celowe oddziaływanie ukierunkowane jest na ociągnięcie pożądanego zachowania się systemu Obiekt sterowany Układ sterujący System sterowania Połączenie - układ sterujący oraz obiekt sterowany tworzy układ sterowania

3
Podział wielkości wejściowych i wyjściowych dla obiektu sterowanego
Wielkości wejściowe obiektu sterowanego Wielkości wejściowe poprzez które realizowane jest sterowanie nazywane są: wielkości sterujące (sterowania) Wielkości wejściowe nie będące wielkościami sterującymi (mówimy: niesterowalny wpływ otoczenia na system) nazywane są: wielkości zakłócające (zakłócenia)
 Wielkości wejściowe nie będące wielkościami sterującymi (mówimy: niesterowalny wpływ otoczenia na system) nazywane są: wielkości zakłócające (zakłócenia)")
4
Podział wielkości wejściowych i wyjściowych dla obiektu sterowanego – c.d.
Wielkości wyjściowe obiektu sterowanego Wielkości wyjściowe determinujące realizację funkcji obiektu sterowanego nazywane są: wielkości sterowane – bieżące wartości (wyniki, efekty sterowania) Pozostałe obserwowane wielkości wyjściowe nazywane są: wielkości pomocnicze
 Pozostałe obserwowane wielkości wyjściowe nazywane są: wielkości pomocnicze.")
5
Podział wielkości wejściowych i wyjściowych dla obiektu sterowanego – c.d.
Zakłócenia Zbiór możliwych zakłóceń Wielkości pomocnicze Sterowania Obiekt sterowany Wielkości sterowane (bieżące wartości) Zbiór sterowań dopuszczalnych Problem sterowania pojawia się, gdy istnieje więcej niż jedna możliwość oddziaływania na system – istnieje zbiór sterowań dopuszczalnych
 Zbiór sterowań. dopuszczalnych. Problem sterowania pojawia się, gdy istnieje więcej niż jedna możliwość oddziaływania na system – istnieje zbiór sterowań dopuszczalnych.")
6
Podział wielkości wejściowych i wyjściowych dla układu sterującego
Wielkości wejściowe i wyjściowe dla układu sterującego Dostępna wiedza o obiekcie sterowanym, celu sterowania i spodziewanych zakłóceniach Wielkości sterowane (pożądane wartości) Układ sterujący Sterowania Wielkości sterowane (bieżące wartości)
 Układ. sterujący. Sterowania. Wielkości sterowane (bieżące wartości)")
7
Obiekt sterowany + układ sterujący
= system sterowania Sposób współdziałania (wzajemnych oddziaływań) obiektu sterowanego z układem sterującym = struktura systemu sterowania
 obiektu sterowanego z układem sterującym = struktura systemu sterowania.")
8
Wielkości zakłócające
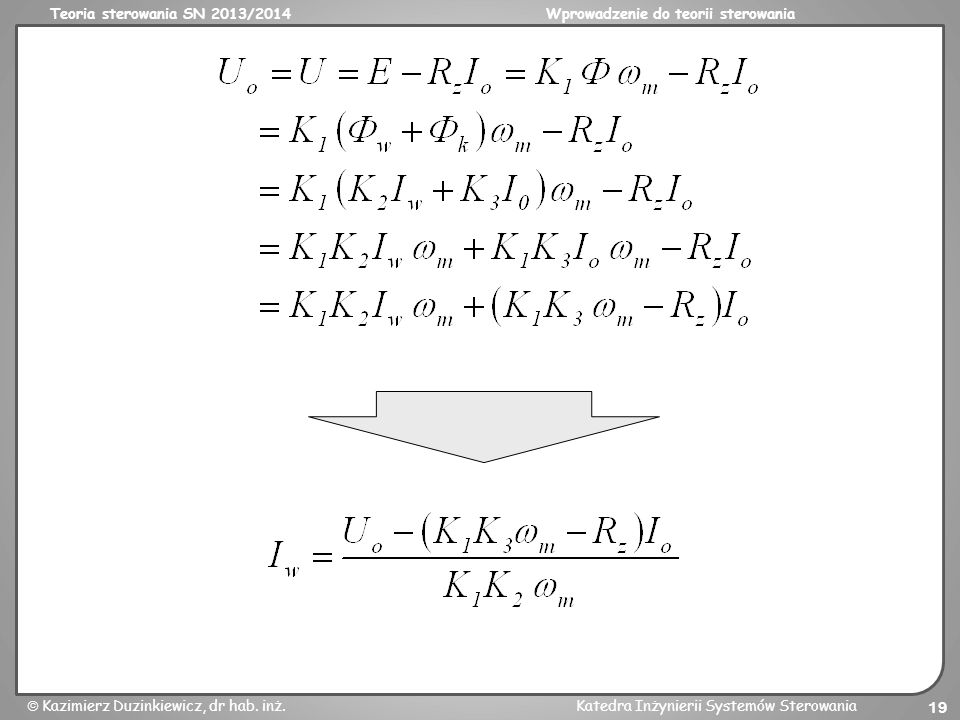
Zadanie: Utrzymać napięcie zasilania odbiorników w sieci prądu stałego na stałym, zadanym poziomie Uo=24V I rozwiązanie Wielkości zakłócające ωm Io Rz E Iw Φw Wielkość sterowana Wielkość sterująca Obiekt sterowany Układ sterujący

9
Układ otwarty sterowania
W przykładzie: W przykładzie: Dostępna wiedza o obiekcie sterowanym, celu sterowania i wielkościach zakłócających Wielkości zakłócające Wielkości zakłócające Obiekt sterowany Układ sterujący Wielkość sterująca Wielkość sterowana (bieżąca wartość) W przykładzie W przykładzie Układ otwarty sterowania
 W przykładzie. W przykładzie. Układ otwarty sterowania.")
10
parametry systemu sterowania wartości zakłóceń nominalne
Zadanie 1 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: cel sterowania – stała wartość napięcia zasilania Dla danych: parametry systemu sterowania wartości zakłóceń nominalne Sprawdzić, czy można wybrać taką wartość Iw, aby uchyb sterowania Uε =U0 – U był równy zero

11
Dla przykładowych danych:
Można

12
zakłócenie na poziomie nominalnym
Zadanie 2 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: Dla danych: zakłócenie na poziomie nominalnym zakłócenie zmieniane Dla obliczonego poprzednio Iw, obliczyć wartości U przy zmianach prądu obciążenia Io o 100% w górę i w dół. Obliczyć dla tych przypadków uchyb sterowania Uε =Uo – U

13
Z uzyskanej uprzednio zależności
Dla Io = 0A Niedobrze

14
Dla Io = 200A Niedobrze

15
ωm Rz Przyczyna niezadowolenia - zakłócenia II rozwiązanie
Io Rz E Φk Iw Φw Obiekt sterowany Układ sterujący

16
Obiekt sterowany Układ sterujący
Dostępna wiedza o obiekcie sterowanym, celu sterowania i wielkościach zakłócających W przykładzie: W przykładzie: Wielkości zakłócające Wielkości zakłócające Obiekt sterowany Układ sterujący W przykładzie Wielkość sterująca Wielkość sterowana (wartość bieżąca) W przykładzie W przykładzie Układ otwarty sterowania z pomiarem wielkości zakłócającej (ze sprzężeniem w przód)
 W przykładzie. W przykładzie. Układ otwarty sterowania z pomiarem wielkości zakłócającej (ze sprzężeniem w przód)")
17
W rozwiązaniu zastosowano:
Informacyjne sprzężenie w przód – przekazanie informacji o wartości zakłóceń oddziałujących na obiekt sterowany i/lub układ sterujący do układu sterującego

18
parametry systemu sterowania wartości zakłóceń nominalne
Zadanie 3 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: cel sterowania – stała wartość napięcia zasilania Dla danych: parametry systemu sterowania wartości zakłóceń nominalne Sprawdzić, czy można wybrać taką wartość Iw, aby uchyb sterowania Uε =U0 – U był równy zero

20
Dla przykładowych danych:
Można

21
zakłócenie na poziomie nominalnym
Zadanie 4 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: Dla danych: zakłócenie na poziomie nominalnym zakłócenie zmieniane Dla obliczonego poprzednio Iw, obliczyć wartości U przy zmianach prądu obciążenia o 100% w górę i w dół. Obliczyć dla tych przypadków uchyb sterowania Uε =Uo – U

22
Z uzyskanej uprzednio zależności
Dla Io = 0A Lepiej

23
Dla Io = 200A Lepiej

24
ωm Rz III rozwiązanie Obiekt sterowany Układ sterujący Uo Φk - Io E
Ik K5 Uε Iw Φw Obiekt sterowany Układ sterujący

25
Zależności

26
Układ zamknięty sterowania (ze sprzężeniem zwrotnym)
Dostępna wiedza o obiekcie sterowanym, celu sterowania i wielkościach zakłócających W przykładzie: W przykładzie: Wielkość sterowana (wartość pożądania) Wielkości zakłócające Wielkości zakłócające Wielkość sterowana (wartość bieżąca) Obiekt sterowany Układ sterujący Wielkość sterująca W przykładzie W przykładzie W przykładzie Układ zamknięty sterowania (ze sprzężeniem zwrotnym)
 Wielkości zakłócające. Wielkości zakłócające. Wielkość sterowana. (wartość bieżąca) Obiekt sterowany. Układ sterujący. Wielkość sterująca. W przykładzie. W przykładzie. W przykładzie. Układ zamknięty sterowania (ze sprzężeniem zwrotnym)")
27
W rozwiązaniu zastosowano:
Informacyjne sprzężenie zwrotne – przekazanie informacji o efektach/wynikach sterowania do układu sterującego Ujemne sprzężenie zwrotne – informacja o efektach/wynikach sterowania przeciwdziała niepożądanym zmianom wielkości sterowanej (wielkości sterowanych) System sterowania z ujemnym sprzężeniem zwrotnym nazywany jest układem regulacji
 System sterowania z ujemnym sprzężeniem zwrotnym nazywany jest układem regulacji.")
28
parametry systemu sterowania wartości zakłóceń nominalne
Zadanie 5 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: cel sterowania – stała wartość napięcia zasilania Dla danych: parametry systemu sterowania wartości zakłóceń nominalne Sprawdzić, czy można wybrać taką wartość Iw, aby uchyb sterowania Uε =U0 – U był równy zero

29
Odpowiedź można szybko podać, bo .....

30
zakłócenie na poziomie nominalnym
Zadanie 6 – jakość sterowania Zadanie sterowania – utrzymać stałą wartość napięcia zasilania na poziomie: Dla danych: zakłócenie na poziomie nominalnym zakłócenie zmieniane Dla obliczonego poprzednio Iw, obliczyć wartości U przy zmianach prądu obciążenia o 100% w górę i w dół. Obliczyć dla tych przypadków uchyb sterowania Uε =Uo – U

31
oraz Otrzymamy

32
Ostatecznie Dla Io = 0A

33
Bardzo dobrze

34
Dla Io = 200A Bardzo dobrze

35
Poznaliśmy trzy podstawowe struktury sterowania

36
Teoria sterowania – „pracuje” na modelach systemów dynamicznych
„Klasyczna” teoria sterowania bazuje na modelach wejście – wyjście: - równania różniczkowe wiążące zmienne wejściowe i wyjściowe - transmitancje - …… Współczesna teoria sterowania bazuje na modelach przestrzeni stanu Powody: - jednolitość podejścia do układów liniowych i nieliniowych - jednolitość podejścia do układów jedno i wielowymiarowych - wgląd we „wnętrze” systemu

37
Teoria sterowania – traktuje elementy układu sterowania jak i sam układ sterowania jako system
Klasyfikacje: - Liniowy - nieliniowy - Stacjonarny - niestacjonarny

38
- Jednowymiarowy (SISO) – wielowymiarowy (MIMO)
Klasyfikacje: c.d. - Jednowymiarowy (SISO) – wielowymiarowy (MIMO) Klasyfikacja w odniesieniu do liczby zmiennych wejścia - wyjścia - Czasu ciągłego – czasu dyskretnego Klasyfikacja w odniesieniu charakteru sygnałów wejścia i wyjścia - Otwarty – zamknięty (ze sprzężeniem zwrotnym) Klasyfikacja rozstrzygająca, czy układ sterujący otrzymuje informację o wyjściu obiektu sterowanego Sterownik Obiekt Sterownik Obiekt Zamknięty Otwarty
 – wielowymiarowy (MIMO) Klasyfikacja w odniesieniu do liczby zmiennych wejścia - wyjścia. - Czasu ciągłego – czasu dyskretnego. Klasyfikacja w odniesieniu charakteru sygnałów wejścia i wyjścia. - Otwarty – zamknięty (ze sprzężeniem zwrotnym) Klasyfikacja rozstrzygająca, czy układ sterujący otrzymuje informację o wyjściu obiektu sterowanego. Sterownik. Obiekt. Sterownik. Obiekt. Zamknięty. Otwarty.")
39
Podstawy teorii sterowania w przestrzeni stanu
Systemy liniowe stacjonarne

40
Systemy liniowe stacjonarne – modele różniczkowe i różnicowe
W dziedzinie czasu relacja pomiędzy wejściem a wyjściem systemu liniowego stacjonarnego może być często opisana za pomocą: system ciągły – równania różniczkowe zwyczajne liniowe o stałych współczynnikach system dyskretny – równania różnicowe liniowe o stałych współczynnikach System ciągły; model wejście - wyjście: System dyskretny; model wejście - wyjście:

41
Modele przestrzeni stanu
System ciągły; model przestrzeni stanu Jeżeli mamy p wejść, n stanów, q wyjść x – stany u – wejścia y - wyjścia

42
System dyskretny; model przestrzeni stanu
Jeżeli mamy p wejść, n stanów, q wyjść x – stany u – wejścia y - wyjścia

43
System ciągły; model przestrzeni stanu (zmiennych stanu) - odpowiedzi
Poszukujemy rozwiązań x – stany u – wejścia y - wyjścia Równanie stanu - różniczkowe : Rozwiązanie: Składowa swobodna Składowa wymuszona

44
Składowa swobodna – rozwiązanie równania jednorodnego, rozwiązanie ogólne
Rozwiązanie ogólne – rozwiązanie równania jednorodnego: gdzie

45
Rozwiązanie szczególne – rozwiązanie równania niejednorodnego:
Składowa wymuszona – rozwiązanie równania niejednorodnego, rozwiązanie szczególne Rozwiązanie szczególne – rozwiązanie równania niejednorodnego: Podsumowując – rozwiązanie równania stanu Składowa swobodna Składowa wymuszona Składowa przy zerowym wymuszeniu (Zero Input ZI) Składowa przy zerowym stanie początkowym (Zero State ZS)
 Składowa przy zerowym stanie początkowym (Zero State ZS)")
46
Równanie wyjścia - algebraiczne:
Wyjście policzymy podstawiając uzyskany wynik rozwiązania równania stanu Podsumowanie:

47
Dodatek A: przykłady korzystania z I sposobu
Kluczowy problem przy korzystaniu z tego rozwiązania – obliczenie - macierz tranzycji stanu, macierz fundamentalna I sposób – z definicji szeregu wykładniczego Dodatek A: przykłady korzystania z I sposobu

48
II sposób: znajdujemy najpierw model przestrzeni stanu w dziedzinie zmiennej s

49
Dodatek B: przykłady korzystania z II sposobu
Przez porównanie rozwiązania równania stanu i wyjścia Możemy napisać Dodatek B: przykłady korzystania z II sposobu

50
Funkcja przejścia - transmitancja
Związki opisu w przestrzeni stanu z transmitancją Dla układu SISO: Odpowiedź wyjścia: Funkcja tranzycji stanu Funkcja przejścia - transmitancja

51
Otrzymujemy: Dodatek C: przykład obliczania transmitancji odpowiadającej danemu opisowi w przestrzeni stanu

52
System dyskretny; model przestrzeni stanu (zmiennych stanu) – odpowiedzi
Poszukujemy rozwiązań x – stany u – wejścia y - wyjścia Będziemy przyjmowali: I sposób: Rozwiązanie równania stanu w postaci rekursywnej:

53
Macierz tranzycji stanu:
W ogólnej postaci: Macierz tranzycji stanu: Jest to odpowiednik w dziedzinie czasu ciągłego macierzy Porównanie odpowiedzi stanu Składowa swobodna Składowa wymuszona

54
Odpowiedź wyjścia: Możemy np. policzyć odpowiedź wyjścia na sekwencję impulsu jednostkowego:

55
II sposób: znajdujemy najpierw model przestrzeni stanu w dziedzinie zmiennej z
Określenie transformacji z: lub z zastrzeżeniem, że transformata z istnieje tylko wtedy, gdy istnieje pewne z dla którego szereg z definicji jest zbieżny

56
Korzystając z własności transformaty z możemy dokonać transformacji dyskretnego równania stanu i znaleźć jego odpowiednik w dziedzinie zmiennej z otrzymamy Ostatnie równanie może być rozwiązane względem transformaty X(z) Wprowadzając oznaczenie Możemy to rozwiązanie zapisać w postaci
 Wprowadzając oznaczenie. Możemy to rozwiązanie zapisać w postaci.")
57
Równanie wyjścia w dziedzinie zmiennej z

58
Przez porównanie rozwiązania równania stanu i wyjścia
Możemy napisać

59
Dla skorzystania z tej ostatniej zależności potrzebna jest umiejętność przeprowadzania transformacji odwrotnej z, czyli znajdowania wartości funkcji w chwilach próbkowania Transformacja odwrotna znajduje tylko wartości funkcji w chwilach próbkowania, ale nie umożliwia znalezienia okresu próbkowania Wartości funkcji w chwilach próbkowania – sekwencji wartości, praktycznie znajduje się wykorzystując: dzielenie wielomianów rozkład na ułamki Dodatek D – przykład znajdowania odpowiedzi układu dyskretnego przez dzielenie wielomianów

60
rozkład na ułamki Metoda prawie identyczna to metody używanej w odwrotnej transformacji Laplace’a Ponieważ większość funkcji z ma składnik z w liczniku, jest czasem dogodniej przeprowadzać rozkład na ułamki proste dla F(z)/z niż dla F(z) Procedura 1. znaleźć rozkład na ułamki proste F(z)/z lub F(z) 2. określ odwrotną transformatę f[k] korzystając z tablic transformat Dodatek E – przykłady znajdowania odpowiedzi układu dyskretnego przez rozkład na ułamki proste
/z niż dla F(z) Procedura. 1. znaleźć rozkład na ułamki proste F(z)/z lub F(z) 2. określ odwrotną transformatę f[k] korzystając z tablic transformat. Dodatek E – przykłady znajdowania odpowiedzi układu dyskretnego przez rozkład na ułamki proste.")
61
Wyprowadziliśmy uprzednio równanie stanu i równanie wyjścia dla systemu dyskretnego
Odwrotna transformacja Z wyprowadzonych równań

62
Funkcja przejścia - transmitancja
Dla warunku początkowego Funkcja przejścia - transmitancja Wejście Wyjście Transmitancja systemu dyskretnego Transformata wyjścia systemu dyskretnego

63
– koniec materiału prezentowanego podczas wykładu
Dziękuję – koniec materiału prezentowanego podczas wykładu

64
Dodatek A

65
Przykład 1: Model części mechanicznej silnika prądu stałego, przy zaniedbaniu dynamiki obwodu twornika, wpływu na ten odwód obwodu wzbudzenia i pominięciu momentu obciążenia zewnętrznego można zapisać Przyjmując: otrzymamy Przyjmijmy dla uproszczenia rachunków: oraz

66
Policzmy potęgi A:

67
Korzystamy z definicji
Czasem nie ma potrzeby liczenia granicy szeregu Przykład 2:

68
Policzmy potęgi A:

69
Szereg potęgowy zawiera skończoną liczbę wyrazów

70
Wynik ten można uogólnić na dowolne n

71
Dodatek B

72
Przykład 3: macierz dołączona wyznacznik

73
Otrzymujemy:

74
Rozkład na ułamki proste elementów macierzy
Podobnie

75
Otrzymujemy Ostatecznie macierz tranzycji

76
Przykład 4: Policzymy odpowiedzi układu przy zadanych warunkach początkowych na jednostkowe wymuszenie skokowe Policzmy najpierw:

77
Stąd: Stąd bezpośrednio:

78
Dla podanych warunków początkowych składowa swobodna odpowiedzi stanu i wyjścia :

79
Dla skokowego jednostkowego wejścia transformata Laplace’a składowej wymuszonej odpowiedzi stanu i wyjścia (w dziedzinie zmiennej s)
")
80
Dla skokowego jednostkowego wejścia składowa wymuszona odpowiedzi stanu i wyjścia
Pełna odpowiedź stanu i wyjścia

81
Dodatek C

82
Przykład 5: Transmitancja układu z przykładu 4: Odpowiedź impulsowa:

83
Dodatek D

84
Przykład 6 Znaleźć f[k] - dzielimy licznik i mianownik przez największa potęgę z
![Przykład 6 Znaleźć f[k] - dzielimy licznik i mianownik przez największa potęgę z](http://slideplayer.pl/slide/824506/2/images/84/Przyk%C5%82ad+6+Znale%C5%BA%C4%87+f%5Bk%5D+-+dzielimy+licznik+i+mianownik+przez+najwi%C4%99ksza+pot%C4%99g%C4%99+z.jpg "Przykład 6 Znaleźć f[k] - dzielimy licznik i mianownik przez największa potęgę z")
85
- dzielimy licznik przez mianownik

86
- obliczamy wartość początkową
Otrzymaliśmy

87
Dodatek E

88
Przykład 7 Przypadek: pojedyncze pierwiastki rzeczywiste Znaleźć transformatę odwrotną funkcji: z dzieleniem F(z)/z - rozkład na ułamki proste

89
stąd - spojrzenie w tablice Można zauważyć zatem

90
bez dzielenia F(z) - rozkład na ułamki proste stąd
 - rozkład na ułamki proste stąd")
91
- spojrzenie w tablice zatem

Podobne prezentacje


 Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla.>")
>")









 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")





