Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Metoda elementów skończonych cd.
Ludwik Antal - Numeryczna analiza pól elektromagnetycznych –W8

2
Elementy wyższych rzędów
Dotychczas rozpatrywane elementy liniowe były opisane funkcją kształtu rzędu pierwszego. Elementy wyższych rzędów to elementy, których funkcja kształtu (wielomian interpolacyjny) jest rzędu drugiego lub wyższego. Dokładność rozwiązania w metodzie elementów skończonych może być poprawiona przez użycie dokładniejszej siatki, użycie elementów wyższego rzędu lub oba mechanizmy. Ogólnie, mniejsza ilość elementów wyższego rzędu pozwala osiągnąć ten sam stopień dokładności wyników co większa ilość elementów liniowych. Elementy wyższych rzędów są szczególnie użyteczne kiedy oczekuje się, że gradient pola zmienia się gwałtownie.
 jest rzędu drugiego lub wyższego. Dokładność rozwiązania w metodzie elementów skończonych może być poprawiona przez użycie dokładniejszej siatki, użycie elementów wyższego rzędu lub oba mechanizmy. Ogólnie, mniejsza ilość elementów wyższego rzędu pozwala osiągnąć ten sam stopień dokładności wyników co większa ilość elementów liniowych. Elementy wyższych rzędów są szczególnie użyteczne kiedy oczekuje się, że gradient pola zmienia się gwałtownie.")
3
Trójkąt Pascal’a Trójkątowe elementy wyższego rzędu mogą być systematycznie opisane za pomocą trójkąta Pascal’a. Pierwszy rząd: (stała, n = 0), drugi: (liniowy, n = 1), trzeci: (kwadratowy, n = 2), czwarty: (sześcienny, n = 3), piąty: (dwukwadratowy, n = 4).
, drugi: (liniowy, n = 1), trzeci: (kwadratowy, n = 2), czwarty: (sześcienny, n = 3), piąty: (dwukwadratowy, n = 4).")
4
Rodzinę elementów skończonych (z rozkładem węzłów) generowanych w ten sposób, ilustruje rysunek. Zauważmy, że elementy wyższych rzędów mają węzły dodatkowe (na bokach lub wewnątrz) poza węzłami podstawowymi (w wierzchołkach). Liczba węzłów jest dokładnie taka by możliwe było zdefiniowanie funkcji kształtu odpowiedniego rzędu.
 poza węzłami podstawowymi (w wierzchołkach). Liczba węzłów jest dokładnie taka by możliwe było zdefiniowanie funkcji kształtu odpowiedniego rzędu..")
5
Trójkąt Pascal’a zawiera wyrazy funkcji bazowych różnych stopni zmienych x i y. Dowolna funkcja i (x, y) może być aproksymowana w elemencie wyrazami kompletnego wielomianu n-tego rzędu jako gdzie jest liczbą wyrazów wielomianu (a także liczbą węzłów w trójkącie). Np., dla rzędu drugiego (n = 2) czyli trójkątowego elementu kwadratowego (sześcio-węzłowego)
. Np., dla rzędu drugiego (n = 2) czyli trójkątowego elementu kwadratowego (sześcio-węzłowego)")
6
Lokalny układ współrzędnych
Systematyczne wyprowadzenie funkcji interpolacyjnych dla elementów wyższych rzędów wymaga użycia lokalnego układu współrzędnych. Trójkątowe współrzędne lokalne (ξ1, ξ2, ξ3) są związane z kartezjańskimi współrzędnymi (x, y) następująco: Współrzędne lokalne są bezwymiarowe, a ich wartości mieszczą się w zakresie 0 do 1. Lokalny układ współrzędnych
 są związane z kartezjańskimi współrzędnymi (x, y) następująco: Współrzędne lokalne są bezwymiarowe, a ich wartości mieszczą się w zakresie 0 do 1. Lokalny układ współrzędnych.")
7
a Z definicji, ξi w jakimkolwiek punkcie w granicach trójkąta jest stosunkiem prostopadłej odległości od punktu do boku przeciwległego do wierzchołka i, do wysokości wyciągniętej z wierzchołka i. Na przykład dla P, wartość ξ1 jest dana przez stosunek prostopadłej odległości d od boku przeciwległego do wierzchołka 1, do wysokości h z wierzchołka 1 do tego boku.

8
Skoro więc ponieważ A1 + A2 + A3 = A. Współrzędne lokalne ξi są także nazywane współrzędnymi powierzchniowymi. Zmiany (ξ1, ξ2, ξ3) wewnątrz elementu
 wewnątrz elementu.")
9
Odwrotna zależność współrzędnych
gdzie powierzchnia trójkata a (i, j, k) jest permutacją parzystą (1,2,3), czyli:
 jest permutacją parzystą (1,2,3), czyli:")
10
x y a b c 1 -1 2 3

11
Operacje różniczkowania i całkowania
Operacje różniczkowania i całkowania wyrażone przez współrzędne lokalne:

12
Funkcje kształtu Punkty wewnątrz elementu skończonego można etykietować liczbami całkowitymi i, j, k , przy pomocy których można wyrazić współrzędne lokalne: Jeżeli dla każdego punktu Pijk, funkcję zapisze się jako ijk, to aproksymacja gdzie

13
Relacje między indeksami q ∈ {1, 2, 3} w ξq, l ∈ {1, 2,
Relacje między indeksami q ∈ {1, 2, 3} w ξq, l ∈ {1, 2, , m} w αl, i r ∈ (i, j, k) w pr i Pijk w równaniach poprzednich dla n od 1 do 4 ilustrują rysunki Z funkcji kształtu wyznacza się macierze współczynników itd.
 w pr i Pijk w równaniach poprzednich dla n od 1 do 4 ilustrują rysunki. Z funkcji kształtu wyznacza się macierze współczynników itd.")
14
Elementy 3 wymiarowe Technika 2D elementów skończonych może być rozszerzona na elementy 3D. Jednak można się spodziewać że problem 3D będzie wymagał dużej liczby elementów dla uzyskania odpowiedniej dokładności i w konsekwencji dużej pojemności obliczeniowej i długiego czasu obliczeń. Dla wyjaśnienia problemu rozważymy równanie Helmholtz’a w 3-ch wymiarach: Dzielimy region rozwiązania na czworościenne albo sześcioboczne elementy. Przyjmując cztero-węzłowy czworościenny element, funkcja w granicach elementu jest reprezentowana przez: Podobnie aproksymuje się funkcję g.

15
Dla czterech węzłów elementu czworościennego:
Otrzymuje się układ czterech równań z którego wyznacza się współczynniki a, b, c, i d.

16
Wyznacznik główny układu
Gdzie v jest objętością czworościanu Po wyznaczeniu a, b, c, i d, można napisać gdzie i podobnie 3 i 4

17
Dla aproksymacji wyższych rzędów macierze mają znacznie większe rozmiary i celowe jest wprowadzenie współrzędnych lokalnych. Dla takich współrzędnych istnieją równania całkowe upraszczające podstawowe macierze współczynników T i Q. Dla elementu czworościennego współrzędne lokalne ξ1, ξ2, ξ3, i ξ4, są prostopadłe do jego ścian. Dla danego punktu są zdefiniowane jako stosunek odległości od punktu do odpowiedniego wierzchołka do prostopadłej odległości ściany i przeciwległego wierzchołka (wysokości). Mogą być również interpretowane jako stosunek objętości tzn. dla punktu P Gdzie vi jest objętością ograniczoną punktem P i ścianą i. Oczywiste jest, że skąd
. Mogą być również interpretowane jako stosunek objętości tzn. dla punktu P. Gdzie vi jest objętością ograniczoną punktem P i ścianą i. Oczywiste jest, że. skąd.")
18
Dla współrzędnych lokalnych funkcja szukana wewnątrz elementu może być aproksymowana wielomianem rzędu n gdzie liczba węzłów czworościanu lub liczba wyrazów wielomianu Każdy punkt w czworościennym elemencie jest reprezentowany przez cztery liczby całkowite i, j, k, i l które mogą być użyte do określenia współrzędnych lokalnych (ξ1, ξ2, ξ3, ξ4). Dla punktu Pijkl,
. Dla punktu Pijkl,")
19
Wyrazy kompletnego 3 wymiarowego wielomianu mogą być stablicowane.

20
Dla każdego węzła czworościanu
gdzie q = 1, 2, , m Schemat numerowania dla czworościanu rzędu drugiego.

21
Metoda elementów skończonych dla problemów zewnętrznych
Metoda elementów nieskończonych Dzielimy całą domenę na region bliskiego pola (b.p.), który jest ograniczony, i region dalekiego pola (d.p.), który jest nieograniczony. Region b.p. jest podzielony na zwykłe trójkątne elementy skończone, podczas gdy region d.p. jest podzielony na elementy nieskończone. Każdy nieskończony element dzieli dwa węzły z elementem skończonym. Tutaj jesteśmy zainteresowani głównie elementami nieskończonymi. Rozważmy nieskończony element na rysunku (b) z węzłami 1 i 2 i promieniowymi bokami przecinającymi się w punkcie (x0, y0).
, który jest ograniczony, i region dalekiego pola (d.p.), który jest nieograniczony. Region b.p. jest podzielony na zwykłe trójkątne elementy skończone, podczas gdy region d.p. jest podzielony na elementy nieskończone. Każdy nieskończony element dzieli dwa węzły z elementem skończonym. Tutaj jesteśmy zainteresowani głównie elementami nieskończonymi. Rozważmy nieskończony element na rysunku (b) z węzłami 1 i 2 i promieniowymi bokami przecinającymi się w punkcie (x0, y0).")
22
Związek trójkątowych współrzędnych biegunowych (, ) i globalnych współrzędnych kartezjańskich (x, y) gdzie 1 ≤ ρ < ∞, 0 ≤ ξ ≤ 1. Rozkład potencjału wewnątrz elementu jest aproksymowana przez co można również zapisać gdzie V1 and V2 są potencjałami węzłów 1 i 2 elementu nieskończonego, α1 i α2 są funkcjami kształtu. Element nieskończony jest zgodny ze zwykłym elementem skończonym rzędu pierwszego i spełnia warunek brzegowy w nieskończoności. Dalsze rozwiązanie polega na połączeniu macierzy współczynników dla pola bliskiego i pola dalekiego.

23
Metoda elementów brzegowych
Porównanie metody elementów skończonych z metodą momentów pokazuje, że są to metody komplementarne. Dlatego budowane są metody hybrydowe pozwalające wykorzystać silne punkty każdej z metod. Metoda Momentów Pojęciowo łatwa Mało równań; O(n) dla 2-D, O(n2) dla 3-D Tylko granica jest dyskretyzowana Problem otwarty łatwy Pole obliczane przez całkowanie Dobra reprezentacja warunków pola odległego Macierze pełne Nieliniowość, niejednorodność trudne Metoda Elementów Skończonych Pojęciowo zawikłana Dużo równań; O(n2) dla 2-D, O(n3) dla 3-D Wewnętrzny obszar jest dyskretyzowany Problem otwarty trudny Pole obliczane przez różniczkowanie Dobra reprezentacja warunków brzegowych Macierze rzadkie Nieliniowość, niejednorodność łatwe
 dla 2-D, O(n2) dla 3-D. Tylko granica jest dyskretyzowana. Problem otwarty łatwy. Pole obliczane przez całkowanie. Dobra reprezentacja warunków pola odległego. Macierze pełne. Nieliniowość, niejednorodność trudne. Metoda Elementów Skończonych. Pojęciowo zawikłana. Dużo równań; O(n2) dla 2-D, O(n3) dla 3-D. Wewnętrzny obszar jest dyskretyzowany. Problem otwarty trudny. Pole obliczane przez różniczkowanie. Dobra reprezentacja warunków brzegowych. Macierze rzadkie. Nieliniowość, niejednorodność łatwe.")
24
Jedną z takich metod hybrydowych jest metoda elementów brzegowych (BEM). Służy głównie do rozwiązywania problemów zewnętrznych. Bazuje na całkowym sformułowaniu zagadnienia brzegowego i w rozwiązaniu posługuje się procedurami dyskretyzującymi podobnymi do używanych w analizie FEM. Ponieważ BEM bazuje na brzegowym ekwiwalencie całkowym równań różniczkowych, tylko powierzchnia obszaru problemu musi być zamodelowana. W ten sposób rozmiar problemu jest zredukowany o 1 jak w metodzie momentów (MOM). Dla problemów 2-D, elementy graniczne stają się segmentami linii prostych, a dla problemów 3-D są elementami trójkątowymi. Funkcje kształtu są używane podobnie jak w FEM. problemy osiowo symetryczne

25
Modelowanie polowo-obwodowe
POLOWO-OBWODOWY 2D MODEL SILNIKA INDUKCYJNEGO Poszukiwany przy pomocy modelu polowo-obwodowego rozkład pola wynika z rozwiązania równania Poisson’a: gdzie: J i A – składowe z gęstości prądu i potencjału wektorowego, niezależne od współrzędnej z, ν – reluktywność. Gęstość prądu J ma trzy składniki: pierwszy wywołany zewnętrznym źródłem napięcia, drugi indukowany przez zmienny w czasie strumień magnetyczny i trzeci wywołany ruchem w polu magnetycznym: gdzie: - konduktywność, V - napięcie zewnętrzne, l - długość obiektu w kierunku osi z, v - prędkość przewodnika względem indukcji B.

26
W rozpatrywanym silniku indukcyjnym zastosowano dwa różne układy odniesienia: jeden związany z nieruchomym stojanem, a drugi z ruchomym wirnikiem. Ruchomy układ odniesienia powoduje, że względna prędkość ruchomego wirnika w tym układzie jest równa zeru i równanie pierwsze upraszcza się do postaci: Równania polowe i napięciowe uzupełnia równanie równowagi mechanicznej: w którym: J - moment inercji, d2/dt przyspieszenie kątowe, d/dt - prędkość kątowa, f współczynnik tarcia, Mr moment obciążenia, M moment elektromagnetyczny w szczelinie.

27
W rozwiązaniu problemu przejściowego, w każdym kroku czasowym obliczany jest elektromagnetyczny moment silnika M. W wyniku rozwiązania równania ruchu otrzymuje się przyspieszenie kątowe wirnika, prędkość i przemieszczenie kątowe. Obliczone przemieszczenie kątowe jest następnie używane do przesunięcia siatki wirnika. Ruch wirnika jest modelowany przez przesunięcie siatki wirnika bez jakichkolwiek modyfikacji siatki. Siatka stojana pozostaje niezmienna i jest podłączona do ruchomej siatki wirnika przy pomocy ruchomej szczeliny powietrznej. Ruchoma szczelina to pojedyncza warstwa siatki, która jest dyskretyzowana podczas każdego kroku procesu rozwiązywania.

28
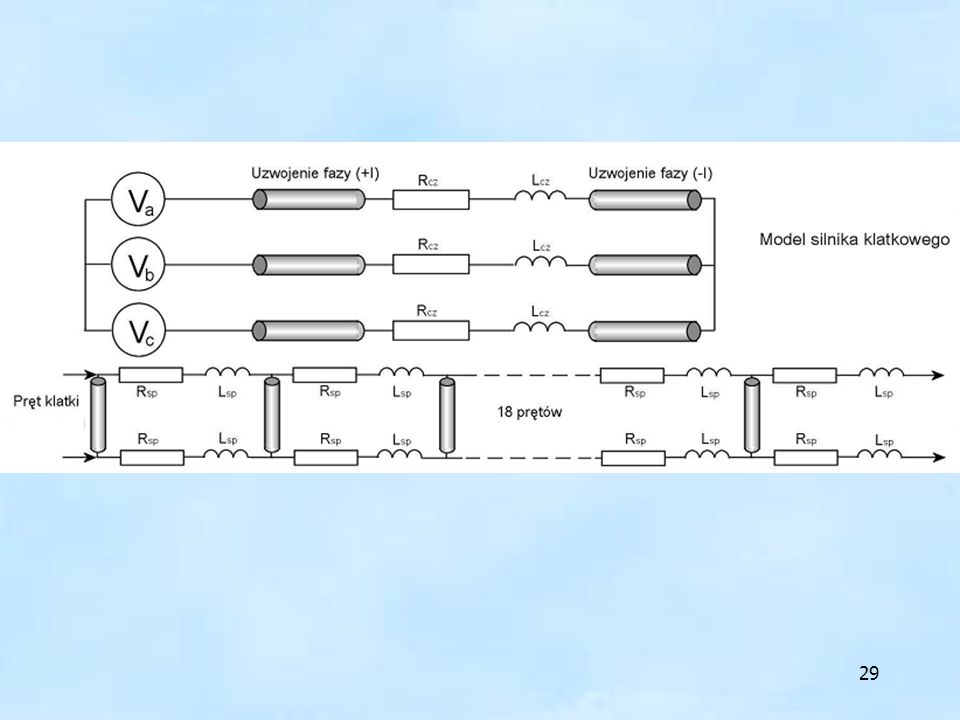
Model polowy silnika klatkowego uwzględnia częstotliwości napięcia zasilającego, nieliniowość elementów magnetycznych oraz ruch wirnika odwzorowywany przez wirującą szczelinę powietrzną. Model obwodowy o wymuszeniu napięciowym uwzględnia parametry elektryczne układu zasilania oraz uzwojenia fazowe stojana o zmiennej indukcyjności i stałej rezystancji jak również stałych rezystancji i indukcyjności jego połączeń czołowych. Klatka wirnika reprezentowana jest przez rezystancje i reaktancje wycinków pierścienia zwierającego o stałej wartości i lite pręty, których parametry wynikają z rozwiązania polowego. Wirująca szczelina powietrzna umożliwia obliczanie pola zarówno w stanach statycznych jak i dynamicznych, a więc dla ustalonej i zmiennej prędkości silnika.

30
Z magnesami trwałymi

Podobne prezentacje















,>")



