Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Wykład no 9

2
Wyznaczanie obszaru stabilności bezwzględnej
Przekształćmy równanie charakterystyczne do postaci:

3
i stawiamy pytanie odwrotnie:
Jeżeli z leży wewnątrz lub na kole jednostkowym to gdzie będzie leżało płaszczyzna płaszczyzna z Im() iy x Re()
 iy. x. Re()")
4
Przykłady metoda jawna Adamsa - Bashfortha
schemat Eulera Przyjmując, że z leży na okręgu jednostkowym i podstawiając do równania:

5
dla metody Eulera otrzymujemy:
Wnętrze koła i dla rzeczywistych mamy:

6
Algorytm Adamsa – Bashfortha II-go rzędu
i po odpowiednich przekształceniach mamy:

7
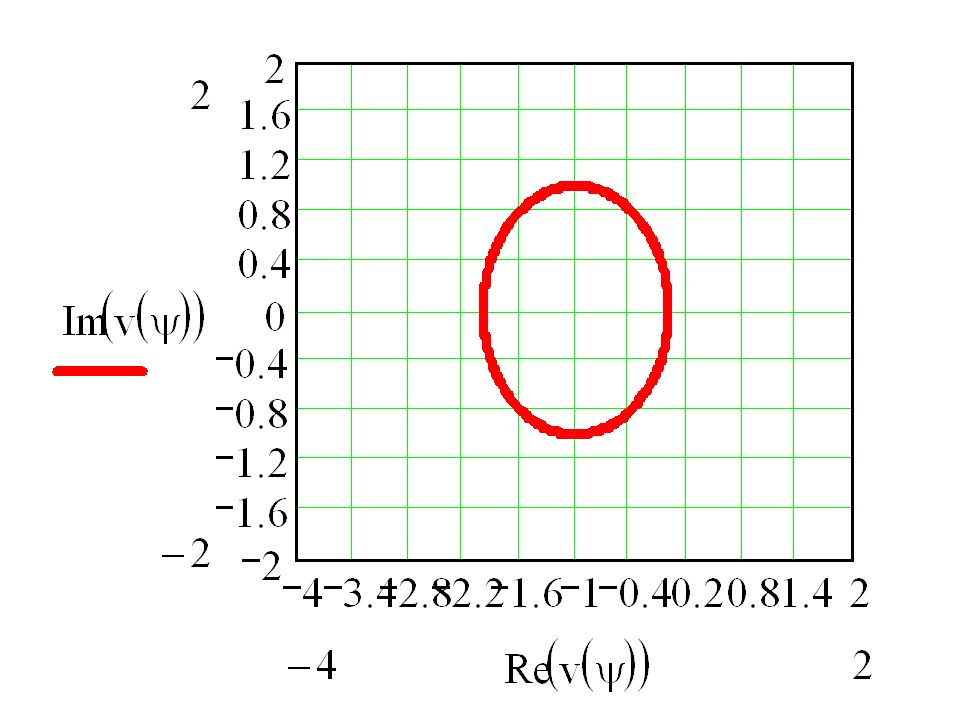
Odwzorowanie koła jednostkowego jest
Jeżeli rzeczywiste

8
Dla rzędu III-go Dla rzeczywistych

9
Dla czwartego rzędu h jeszcze mniejsze niż dla metody rzędu trzeciego

10
Metody niejawne Adamsa – Moultona
metoda niejawna Eulera Obszar stabilności określa równanie: Jest to równanie okręgu o środku w punkcie –1 i promieniu 1. Obszar stabilności na zewnątrz tego okręgu.

12
niejawna metoda Eulera:
Oznacza to, że niejawna metoda Eulera: jest stabilna dla dowolnej długości kroku h. Oczywiście nie możemy zapomnieć o fizyce procesu opisywanego równaniem czy układem równań różniczkowych

13
Algorytm II-go rzędu (algorytm trapezów)
Dla odwzorowania koła jednostkowego mamy: Badamy jak odwzorowuje się koło czyli

15
Wnętrze koła odwzorowuje się na prawą półpłaszczyznę
co oznacza, że jeżeli rozwiązanie równania jest stabilne, czyli Re() 0, to krok całkowania h może być dowolny. Zawsze nie możemy zapomnieć o fizyce procesu opisywanego równaniem czy układem równań różniczkowych i to jest główne ograniczenie wielkości kroku.
 0, to krok całkowania h może być dowolny. Zawsze nie możemy zapomnieć o fizyce procesu. opisywanego równaniem czy układem równań różniczkowych. i to jest główne ograniczenie wielkości kroku.")
16
Algorytm III-go rzędu Adamsa - Moultona
i dla koła jednostkowego czyli

17
dla rzeczywistych mamy warunek:

18
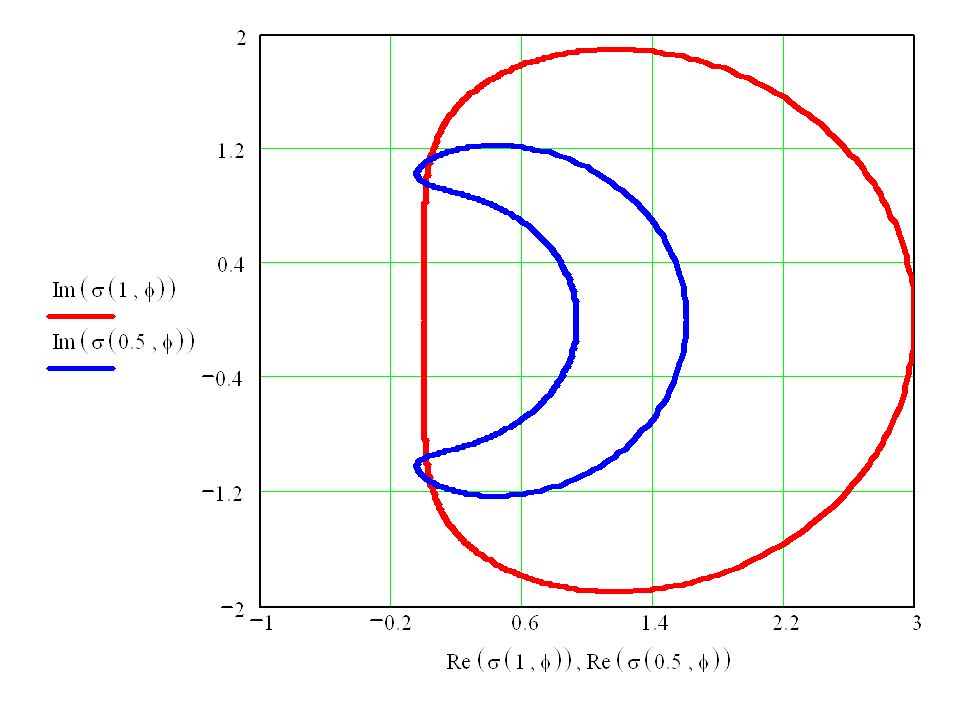
Algorytm VI-go rzędu Adamsa - Moultona
i mamy odwzorowanie:

20
i Zbierając wyniki: Metody jawne Adamsa – Bashfortha: i algorytm niejawny Adamsa –Moultona: h – dowolny h – dowolny h < 6 h < 3

21
Otrzymane wyniki pokazują wyższość metod niejawnych
nad metodami jawnymi. W metodzie predyktor – korektor, gdzie metoda jawna służy tylko i wyłącznie do otrzymania zerowego przybliżenia rozwiązania równania metody niejawnej, o stabilności decyduje tylko metoda niejawna. Jak widać również z podanych ocen z punktu widzenia stabilności zbyt wysoki rząd metody nie jest korzystny

22
na kondensatorze jest:
Równania sztywne Dany jest obwód elektryczny: Równanie różniczkowe dla napięcia uC na kondensatorze jest: uC Warunki początkowe są: i Równanie charakterystyczne: które ma pierwiastki: i

23
r2=-10000 r1=-10

24
Zapiszmy równanie: w postaci normalnej: lub podstawiając dane: warunki początkowe: Wybierzmy metodę jawną Eulera, krok h=10-5

26
stała czasowa 0.1 więc można
Ponieważ dla czasów zanikła składowa u2(t)~exp(-10000t) weźmy dokładne wartości startowe w punkcie t=0.005 i(t=0.005)= uC(t=0.005)= stała czasowa 0.1 więc można przyjąć krok h=0.01
~exp(-10000t) weźmy dokładne wartości startowe w punkcie t= i(t=0.005)= uC(t=0.005)= stała czasowa 0.1 więc można. przyjąć krok h=0.01.")
27
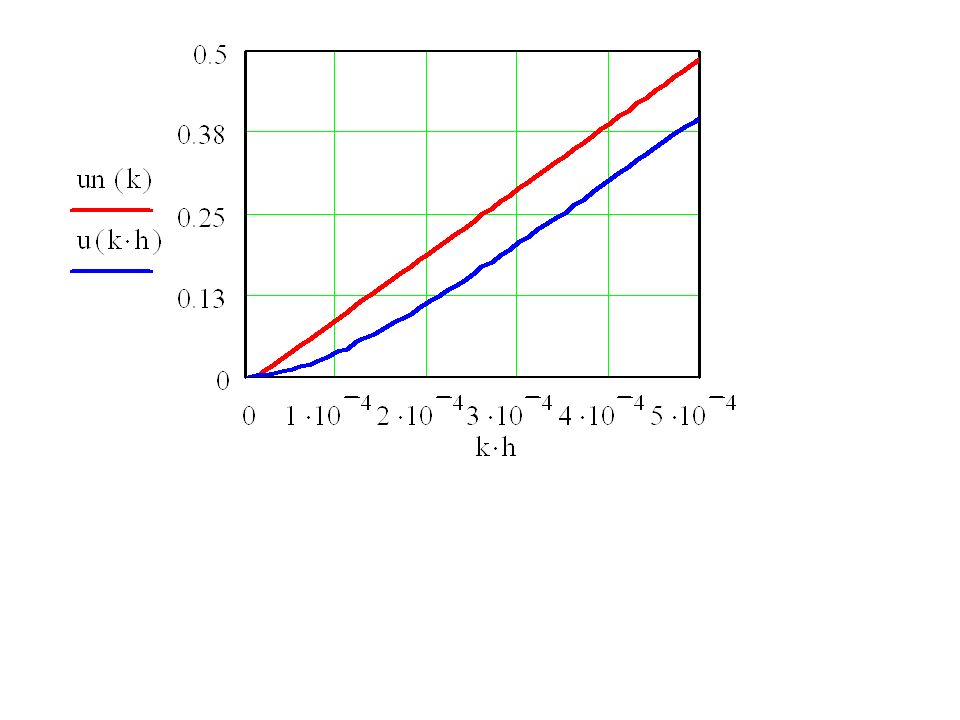
krok h=

28
krytyczny krok hkr<0.0002
start w punkcie t=0.005 z dokładnych wartości początkowych

29
Rozważamy układ n równań różniczkowych:
i=1,2,...,n i może być liczbą zespoloną postaci: Jedno z rozwiązań układu równań różniczkowych będzie postaci: gdzie Ci jest stałą całkowania. Przypadek 1. ponieważ =h, więc czyli jest to prawa półpłaszczyzna

30
rozwiązanie powinno być i dokładne i stabilne, bo składowa przejściowa
Im liczba dobrana tak, że po jednym kroku praktycznie: III stabilny W obszarze: Re rozwiązanie powinno być i dokładne i stabilne, bo składowa przejściowa nie znikła i mamy oscylacje Dla uzyskania dokładności w fazie początkowej powinno być N<1/8. Oznaczając =ih Liczba oscylacji:

31
rozwiązanie numeryczne
Im mamy: czyli III stabilny II W obszarze II rozwiązanie numeryczne musi być: dokładne i stabilne Re - Przypadek 2. jest narastające i można liczyć tylko odpowiednio małym krokiem Rozwiązanie

32
dokładny i względnie stabilny III
Im czyli algorytm powinien być dokładny i względnie stabilny III stabilny II I Algorytmy spełniające warunki I, II, III nazywamy sztywno stabilnymi - Re - Twierdzenie Dahlquista: Algorytm wielokrokowy, stabilny bezwzględnie w obszarze nie może być rzędu wyższego niż 2. Najlepszy jest algorytm trapezów.

33
Trapezy prawa półpłaszczyzna =0

34
=0 trzeci rząd dla rzeczywistych mamy warunek:

35
=0 czwarty rząd

36
Algorytmy sztywno stabilne Geara
Pierwszego

37
drugiego:

38
trzeciego:

39
czwartego:

40
Metoda Runge - Kutty Równanie Rozwiązujemy stosując szereg Taylora ale

41
czyli

42
ale a Podstawiając do i porządkując mamy

43
Metoda Runge -Kutty

44
Sposób wyznaczania współczynników na przykładzie
metody drugiego rzędu (p=2): Drugi składnik rozwijamy w szereg Taylora w otoczeniu punktu xn, tn Podstawiając i porządkując mamy:
: Drugi składnik rozwijamy w szereg Taylora. w otoczeniu punktu xn, tn. Podstawiając i porządkując mamy:")
45
a porównując z szeregiem Taylora
przy tych samych potęgach h otrzymujemy:

46
lub w1=w2=w i rozwiązując otrzymujemy:
Przyjmując w2=1 mamy: w1=0, b21=1/2 i stąd algorytm: lub w1=w2=w i rozwiązując otrzymujemy: w=0.5, b21=1 i stąd inny algorytm:

47
Przykład: Dany jest dławik o charakterystce: Rezystancja dławika wynosi 0.5. Obliczyć prąd płynący w obwodzie zasilanym sem e(t)=100sin314t. Schemat obwodu możemy przyjąć w postaci:
=100sin314t. Schemat obwodu możemy przyjąć w postaci:")
48
Suma spadków napięć pozwala zapisać równanie:
Biorąc pod uwagę krzywą magnesowania: Podstawiając do równania obwodu i porządkując:

49
Warunek początkowy jest i0=i(t=0)=0.
Wybór kroku całkowania: Stała czasowa liniowej części obwodu wynosi 0.1/0.5=0.2s. Krok czasowy można przyjąć 0.2/10=20ms. Okres wymuszenia T=20ms krok należy przyjąć rzędu T/20=1ms. Prawdopodobnie będzie trzecia harmoniczna więc przyjmujemy krok h=0.2ms.

50
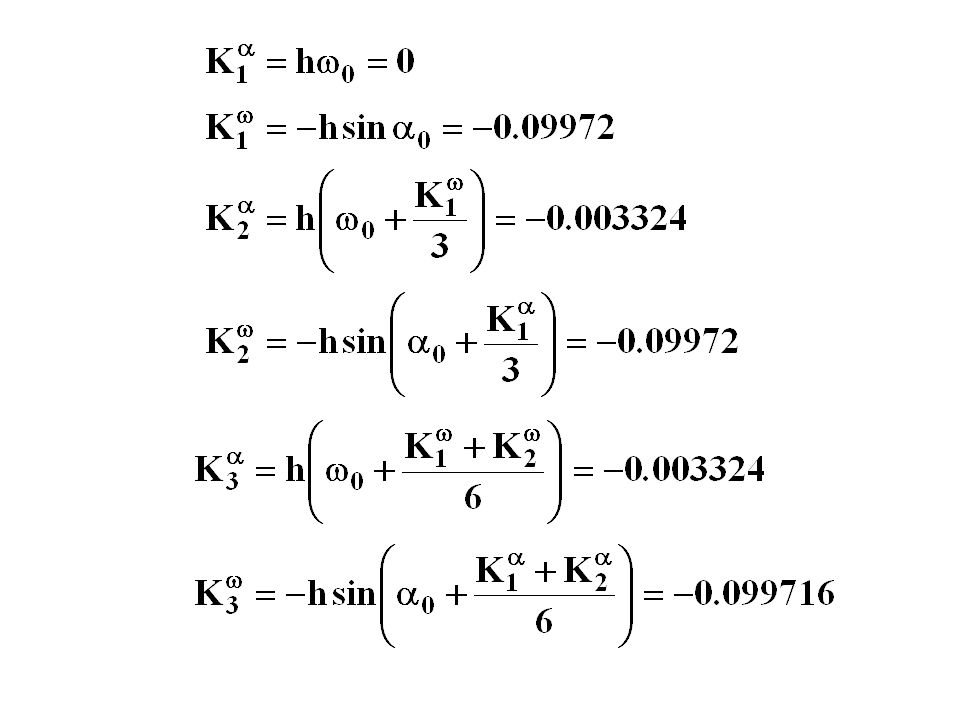
Obliczenia metodą Runge – Kutty według schematu:
x=i; Start: i(t=0)=i0=0 h=0.0002
=i0=0. h=")
51
i mamy: t=h=0.0002 Metoda Runge – Kutty pozwala zmienić krok na każdym etapie. Zwiększamy krok dwukrotnie. h=0.0004

52
i2= K2 i2=

53
Jak ocenić czy wolno zmienić długość kroku?
Czy zmniejszyć czy zwiększyć? Ocena błędu metodą Rungego: Dla metody rzędu p-go mamy:

54
stąd ocena błędu: Znając ocenę błędu można poprawić rozwiązanie podstawiając do

55
lub dokładniej z równania:

56
W obliczanym przypadku musimy powtórzyć
obliczenia z krokiem i mamy dla t=0.0004: K1= K2=0.0188 i1+1/2= Dla t= mamy: K1= K2= i1+2*1/2=

57
i1+2*1/2= i2= Obliczone z krokiem h= było: W tym przypadku p=2 i ze wzoru: mamy oceną błędu:

58
Rozwiązanie poprawione ze wzoru:
Na wykonanie jednego kroku należało policzyć funkcję f(in,tn) 2 – h=0.0004 1+2 – h=0.0002 razem 5 - razy
 2 – h= – h= razem 5 - razy.")
59
Metoda IV –go rzędu Przy ocenie dokładności obliczeń metodą Rungego wymaga 11-krotnego obliczenia f(x,t).
.")
60
Metoda Mersona

61
tylko 5-cio krotne obliczanie f(x,t).
Przykład Równanie wahadła: Niech =1s-2 Warunki początkowe: około 86°

62
Sprowadzamy do układu równań I-go rzędu
Warunki początkowe: Obliczenia chcemy prowadzić z dokładnością 0.001 Startujemy z krokiem h=0.1. Krok wybrano jako 0.1 okresu wahadła liniowego.

64
Błąd:

65
Dokładność założona została osiągnięta.
W następnym kroku można zwiększyć krok. Rozwiązanie w chwili t=0.1 i do następnego kroku możemy wystartować z nową wartością kroku h

66
Metody włożone lub Metody Fehelberga – Runge -Kutty Stosujemy metodę Runge – Kutty rzędu p i rzędu p+1 i aby zmniejszyć liczbę obliczanych współczynników wybieramy je tak, że w obu metodach jest pierwszych p współczynników K jednakowe, czyli i=2,3,..,p+1

67
i mamy dla metody rzędu p-go
a dla metody rzędu (p+1)-go Ocenę błędu można zrobić stosunkowo prosto
-go. Ocenę błędu można zrobić stosunkowo prosto.")
68
Po odjęciu stronami otrzymujemy:
gdzie

69
Znając błąd możemy postępować jak w metodzie
Mersona i rozwiązanie przyjmować z dokładniejszej metody rzędu p+1. Najczęściej stosowana metoda RKF45 ma współczynniki

70
Błąd

71
Rozwiązanie wykorzystując metodę dokładniejszą jest
Metoda gwarantuje obliczenia z błędem rzędu h4.

Podobne prezentacje










,>")









