Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Automatyka Wykład 26 Analiza układu regulacji cyfrowej z regulatorem PI i obiektem inercyjnym I-go rzędu

2
Transmitancja dyskretna regulatora PI
- metoda Tustina

3
Transmitancja dyskretna części ciągłej układu

4
Transmitancja dyskretna układu regulacji

5
Analiza układu regulacji
- równanie charakterystyczne Warunki stabilności: (1)
")
6
Dla a2=1 warunki stabilności (1) przyjmują postać
 przyjmują postać")
7
a1 2 1 -1 1 a0 -1 -2

8
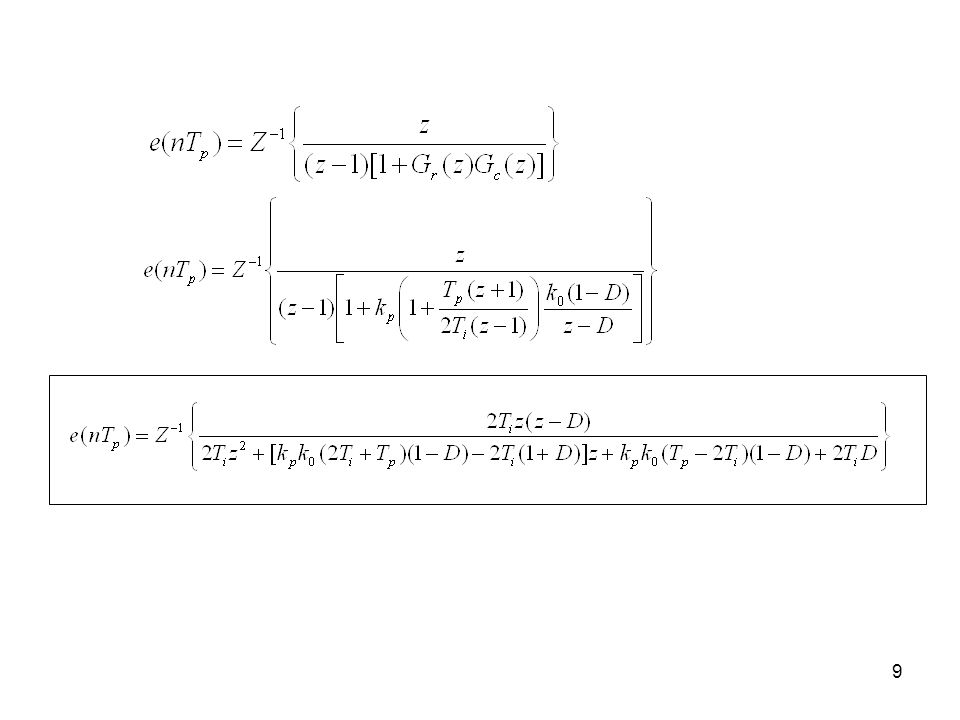
Uchyb ustalony po skokowej zmianie wartości zadanej w(nTp) = 1(nTp) :
Przebieg uchybu regulacji

10
Wyznaczanie sygnału dyskretnego y(n) na podstawie znajomości jego transformaty Y(z)
Przez rozwinięcie transformaty Y(z) w szereg Laurenta. 2. Metodą odwrotnego przekształcenia Z (metoda residuów). Dla biegunów zi jednokrotnych transformaty Y(z) mamy: Dla bieguna wielokrotnego (p-krotnego) mamy: 3. Przez przekształcenie transformaty Y(z) w równanie różnicowe.
 w szereg Laurenta. 2. Metodą odwrotnego przekształcenia Z (metoda residuów). Dla biegunów zi jednokrotnych transformaty Y(z) mamy: Dla bieguna wielokrotnego (p-krotnego) mamy: 3. Przez przekształcenie transformaty Y(z) w równanie różnicowe.")
11
Nastawy regulatorów cyfrowych (wg. Takahashiego)
dla obiektów inercyjnych z opóźnieniem. PID – PI P Td Ti kp Nastawy parametrów regulatora Rodzaj regulatora cyfrowego

12
Transmitancja dyskretna układu w zależności od umiejscowienia impulsatora

Podobne prezentacje








 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji (c.d.)>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")



>")



>")