Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Wykład 11 Jakość regulacji. Regulator PID
Teoria sterowania Wykład 11 Jakość regulacji. Regulator PID

2
Wskaźniki jakości regulacji
Dokładność statyczna Wskaźniki jakości związane z odpowiedzią skokową układu regulacji czas regulacji, czas narastania, maksymalne odchylenie dynamiczne, przeregulowanie. Wskaźniki jakości związane z charakterystyką częstotliwościową pasmo przenoszenia, zapas modułu, zapas fazy, Wskaźniki całkowe. zapas stabilności

3
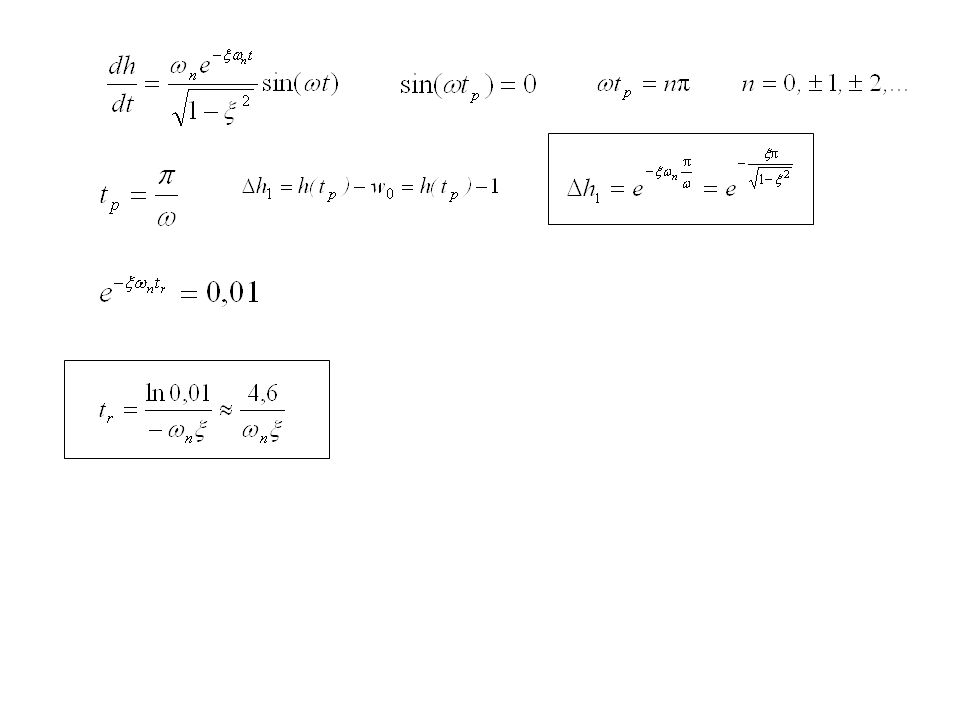
Przebieg oscylacyjny odpowiedzi skokowej
h1 h w0=hust t + – tp tr

5
Zapas stabilności (zapas modułu i zapas fazy)
")
6
Schemat blokowy układu ze sprzężeniem zwrotnym
układ ze sprzężeniem zwrotnym układ bez sprzężenia zwrotnego [dB] Logarytmiczne charakterystyki amplitudowe: układu zamkniętego i układu bez sprzężenia zwrotnego _ + W(s) Y(s) ksp Schemat blokowy układu ze sprzężeniem zwrotnym Układ bez sprzężenia zwrotnego Układ ze sprzężeniem zwrotnym (układ zamknięty) Z charakterystyk przedstawionych na rysunku i obliczonych dla k = =104, ksp = 0,1 i T = 0,01 s wynika, że układ otwarty ma pasmo przenoszenia równe 100 rad/s i wzmocnienie w tym paśmie 104 (80 dB), natomiast układ zamknięty ma pasmo przenoszenia równe 105 rad/s i wzmocnienie równe 10 (20 dB). Dzięki wprowadzeniu sprzężenia zwrotnego uzyskujemy zwiększenie pasma przenoszenia i zmniejszenie wzmocnienia w porównaniu z układem bez sprzężenia zwrotnego.
 Y(s) ksp. Schemat blokowy układu ze sprzężeniem zwrotnym. Układ bez sprzężenia zwrotnego. Układ ze sprzężeniem zwrotnym (układ zamknięty) Z charakterystyk przedstawionych na rysunku i obliczonych dla k = =104, ksp = 0,1 i T = 0,01 s wynika, że układ otwarty ma pasmo przenoszenia równe 100 rad/s i wzmocnienie w tym paśmie 104 (80 dB), natomiast układ zamknięty ma pasmo przenoszenia równe 105 rad/s i wzmocnienie równe 10 (20 dB). Dzięki wprowadzeniu sprzężenia zwrotnego uzyskujemy zwiększenie pasma przenoszenia i zmniejszenie wzmocnienia w porównaniu z układem bez sprzężenia zwrotnego.")
7
Regulator PID (proporcjonalno-całkująco-różniczkujący)
")
8
Równanie regulatora PID analogowego
(1) Odpowiedź skokowa (2) kp t h(t) arc tg kp/Ti 2kp Ti
 Odpowiedź skokowa. (2) kp. t. h(t) arc tg kp/Ti. 2kp. Ti.")
9
Transmitancja operatorowa regulatora PID
(3) Transmitancja widmowa (4)
 Transmitancja widmowa. (4)")
10
Transmitancja operatorowa regulatora PID rzeczywistego
Odpowiedź skokowa t h Ti T kp

11
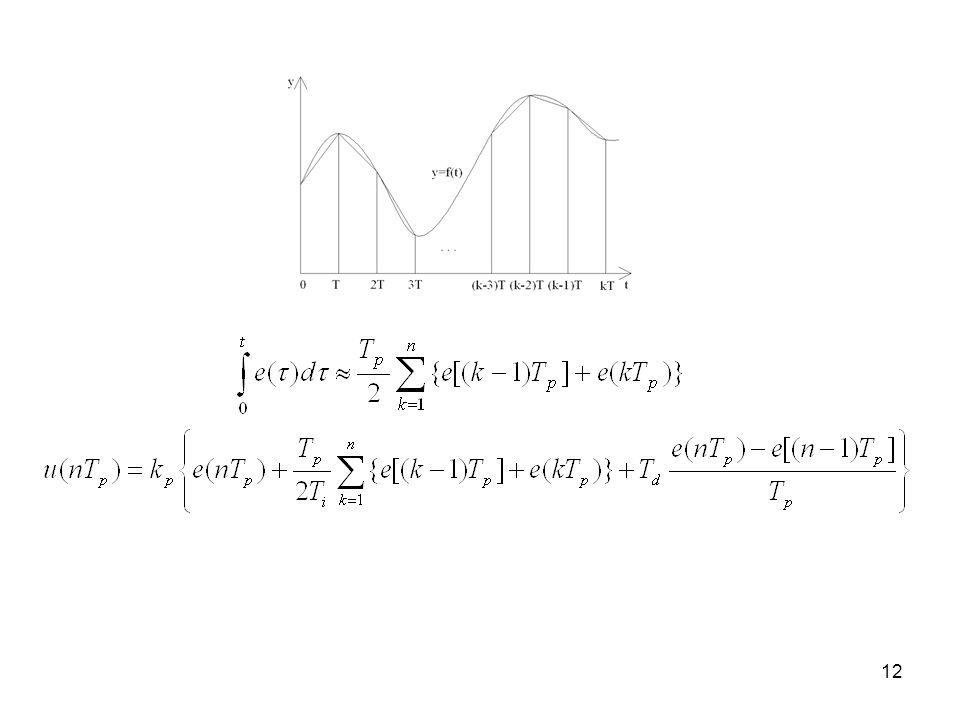
Regulator dyskretny PID
regulator analogowy Algorytm pozycyjny PID

13
Algorytm przyrostowy PID

Podobne prezentacje










 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji (c.d.)>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")




>")
