Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Fizyka Program przedmiotu: 30 godzin wykładu - dr Krystyna Chłędowska 15 godzin ćwiczeń audytoryjnych (semestr zimowy) 15 godzin laboratorium (semestr letni) www.prz.edu.pl Pracownicy Strony domowe
 15 godzin laboratorium (semestr letni) Pracownicy Strony domowe")
2
Literatura 1.C. Bobrowski, Fizyka – krótki kurs, WNT Warszawa 2003 2.K. Chłędowska, R. Sikora, Wybrane problemy fizyki z rozwiązaniami cz. I, Oficyna Wydawnicza Politechniki Rzeszowskiej, Rzeszów 2008 3. K. Chłędowska, R. Sikora, Wybrane problemy fizyki z rozwiązaniami cz. II, Oficyna Wydawnicza Politechniki Rzeszowskiej, Rzeszów 2010 4.D. Halliday, R. Resnick, J. Walker, Podstawy fizyki,PWN, Warszawa 1999 5.J. Massalski, M. Massalska, Fizyka dla inżynierów, WNT Warszawa 1980 6.J. Orear, Fizyka, WNT Warszawa 1999 7.I.W. Sawieliew, Wykłady z fizyki, PWN Warszawa 1994

3
Zaliczenie przedmiotu: Uzyskanie zaliczenia z ćwiczeń audytoryjnych Egzamin po II semestrze: Część pisemna – zadania + teoria + pytania problemowe

4
Cel fizyki poszukiwanie i poznawanie podstawowych praw rządzących zjawiskami przyrody Prawa te muszą być sformułowane w sposób ilościowy, formułuje się je odnosząc się do wyników doświadczeń. Hipotezy - tworzy się celem wytłumaczenia wyników eksperymentu. Pozwalają zaprojektować dalsze eksperymenty i przewidzieć ich wyniki. Hipoteza prawo, jeśli pozwala przewidzieć wyniki bardzo szerokiego zakresu eksperymentów i nie stoi w sprzeczności z żadnym z nich.

5
Teoria - matematyczne ujęcie pewnego modelu zjawisk, obejmująca wszystkie zjawiska z pewnej dziedziny, np. mechanika klasyczna – daje pełny opis ruchów układów makroskopowych, mechanika kwantowa – opisuje mikroświat atomów i cząsteczek. Teoria opiera się na modelu, np. punkt materialny gaz doskonały bryła sztywna Model matematyczny – wyidealizowany model zagadnienia fizycznego – założenia upraszczające – np. wahadło matematyczne.

6
Sprawdzianem każdego poglądu naukowego jest doświadczenie - podstawową czynnością w fizyce jest pomiar. Jednostki podstawowe w układzie SI kilogram – wzorzec 1 kg – walec platynowo–irydowy metr – 1 m – długość równa 1 650 763.73 długości fal (w próżni) promieniowania odpowiadającego przejściu pomiędzy poziomami 2p 10 a 5d 5 kryptonu sekunda – czas trwania 9 192 631 770 drgań promieniowania emitowanego przez amper – 1 A – natężenie prądu stałego, który przepływając przez dwa równoległe prostoliniowe przewodniki o nieskończonej długości i znikomo małym przekroju, umieszczone w próżni w odległości 1 m, wytwarza między przewodnikami siłę oddziaływania równą 2·10 -7 N na każdy metr ich długości.
 promieniowania odpowiadającego przejściu pomiędzy poziomami 2p 10 a 5d 5 kryptonu sekunda – czas trwania drgań promieniowania emitowanego przez amper – 1 A – natężenie prądu stałego, który przepływając przez dwa równoległe prostoliniowe przewodniki o nieskończonej długości i znikomo małym przekroju, umieszczone w próżni w odległości 1 m, wytwarza między przewodnikami siłę oddziaływania równą 2·10 -7 N na każdy metr ich długości..")
7
Kelwin – jednostka temperatury w skali, w której temperatura punktu potrójnego wody jest równa dokładnie 273.16 K. Kandela światłość, którą ma 1/(6·10 5 ) m 2 powierzchni ciała doskonale czarnego, promieniującego w temperaturze krzepnięcia platyny pod ciśnieniem 1 atmosfery. światłość z jaką świeci w określonym kierunku źródło emitujące promieniowanie monochromatyczne o częstotliwości 5,4·10 14 Hz i wydajności energetycznej w tym kierunku równej (1/683) W/sr. Radian – kąt płaski zawarty między dwoma promieniami koła, wycinającymi z okręgu tego koła łuk o długości równej promieniowi. Kąt pełny
 m 2 powierzchni ciała doskonale czarnego, promieniującego w temperaturze krzepnięcia platyny pod ciśnieniem 1 atmosfery. światłość z jaką świeci w określonym kierunku źródło emitujące promieniowanie monochromatyczne o częstotliwości 5,4·10 14 Hz i wydajności energetycznej w tym kierunku równej (1/683) W/sr. Radian – kąt płaski zawarty między dwoma promieniami koła, wycinającymi z okręgu tego koła łuk o długości równej promieniowi. Kąt pełny.")
8
Steradian – kąt bryłowy o wierzchołku w środku kuli wycinającym z powierzchni tej kuli pole równe kwadratowi jej promienia. Pełny kąt bryłowy

9
nazwaskrótnazwaskrót teraT10 12 centyc10 -2 gigaG10 9 milim10 -3 megaM10 6 mikroμ10 -6 kilok10 3 nanon10 -9 hektoh10 2 pikop10 -12 dekada10femtof10 -15 decyd10 -1 attoa10 -18

10
Długości występujące w fizyce: promień krzywizny Wszechświata – 10 27 m odległość Ziemi od Słońca – 10 11 m wysokość najwyższego budynku – 10 2 m długość fali świetlnej – 10 -6 m promień atomu wodoru – 10 -10 m promień lekkich jąder atomowych – 10 -15 m

11
Czasy spotykane w fizyce: przypuszczalny wiek Wszechświata (10 10 lat) – 10 18 s okres połowicznego rozpadu uranu 238 – 10 15 s średni czas życia człowieka – 10 9 s okres obiegu Ziemi wokół Słońca – 10 7 s średni czas życia neutronu – 10 3 s okres drgań dla najniższego słyszalnego tonu – 10 -2 s średni czas życia wzbudzonego atomu – 10 -8 s okres drgań atomów w cząsteczkach – 10 -12 s
 – s okres połowicznego rozpadu uranu 238 – s średni czas życia człowieka – 10 9 s okres obiegu Ziemi wokół Słońca – 10 7 s średni czas życia neutronu – 10 3 s okres drgań dla najniższego słyszalnego tonu – s średni czas życia wzbudzonego atomu – s okres drgań atomów w cząsteczkach – s")
12
Masy różnych ciał: Nasza Galaktyka – 10 41 kg Ziemia – 10 24 kg człowiek – 70 kg pyłek kurzu – 10 -13 kg proton – 10 -27 kg elektron – 10 -31 kg foton (spoczynkowa) – 0
 – 0")
13
Narządy zmysłów dostarczają informacji o znikomej liczbie zjawisk. Oko nie rozróżnia przedmiotów mniejszych od 1/30 mm, mikroskop elektronowy – 10 -7 mm Słuch reaguje na dźwięki o natężeniu większym od 10 -12 W/m 2 w zakresie częstości 20 – 20 000 Hz. Człowiek nie rejestruje działania pól elektrycznych i magnetycznych. Nie reaguje na fale radiowe. Konieczne jest posługiwanie się odpowiednimi przyrządami.

14
Układy współrzędnych a) układ współrzędnych prostokątnych 0 x y z P(x,y,z)
 układ współrzędnych prostokątnych 0 x y z P(x,y,z)")
15
b) biegunowy układ współrzędnych P(r, ) x y
 biegunowy układ współrzędnych P(r, ) x y")
16
c) sferyczny układ współrzędnych 0 x y z P(r, ,θ) θ,.
 sferyczny układ współrzędnych 0 x y z P(r, ,θ) θ,.")
17
Matematyczny opis zjawisk fizycznych wymaga zdefiniowania różnych wielkości fizycznych. Jeden ze sposobów klasyfikowania wielkości fizycznych polega na wyznaczaniu ilości przy założeniu, że ustalona jest jednostka miary. Wielkości, które przy wyznaczonej jednostce miary są w zupełności określone przez jedną liczbę nazywamy skalarami. Należą do nich np. masa, temperatura, czas, droga, praca. Istnieją wielkości, które nie mogą być wyznaczone jednoznacznie przez ich miarę, ponieważ zależą również od kierunku (przyjęto, że kierunek zawiera i zwrot). Takie wielkości nazywamy wektorami. Są nimi np. przemieszczenie ciała, prędkość, siła. W fizyce spotykamy również wielkości, które nie są ani skalarami ani wektorami. Nazywamy je tensorami (np. moment bezwładności).
. Takie wielkości nazywamy wektorami. Są nimi np. przemieszczenie ciała, prędkość, siła. W fizyce spotykamy również wielkości, które nie są ani skalarami ani wektorami. Nazywamy je tensorami (np. moment bezwładności)..")
18
Przestrzeń trójwymiarową określamy podając trzy wektory, zwane wektorami bazy. Mogą nimi być trzy wzajemnie prostopadłe wektory których długości są równe jedności (wersory) Wektory te definiują tzw. kartezjański układ współrzędnych, w którym są one zwyczajowo oznaczane jako Dowolny wektor możemy przedstawić jako kombinację liniową wersorów gdzie: odpowiednie składowe wektora. Elementy rachunku wektorowego
 Wektory te definiują tzw. kartezjański układ współrzędnych, w którym są one zwyczajowo oznaczane jako Dowolny wektor możemy przedstawić jako kombinację liniową wersorów gdzie: odpowiednie składowe wektora. Elementy rachunku wektorowego.")
19
x y z axax ayay azaz

20
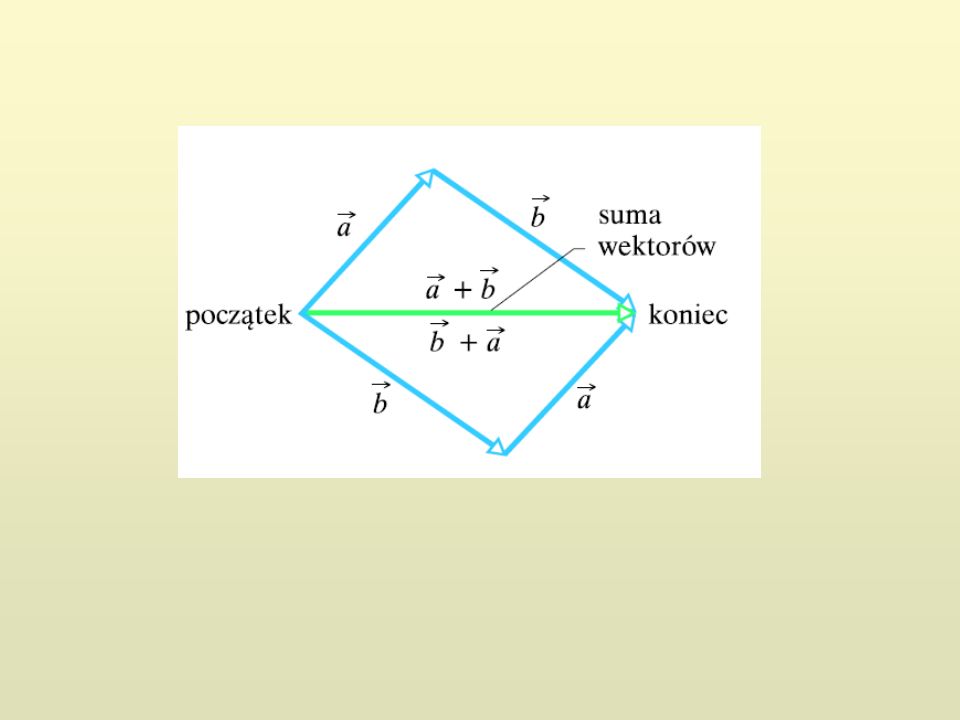
Suma wektorów W kartezjańskim układzie współrzędnych: x y

22
Różnica wektorów:

23
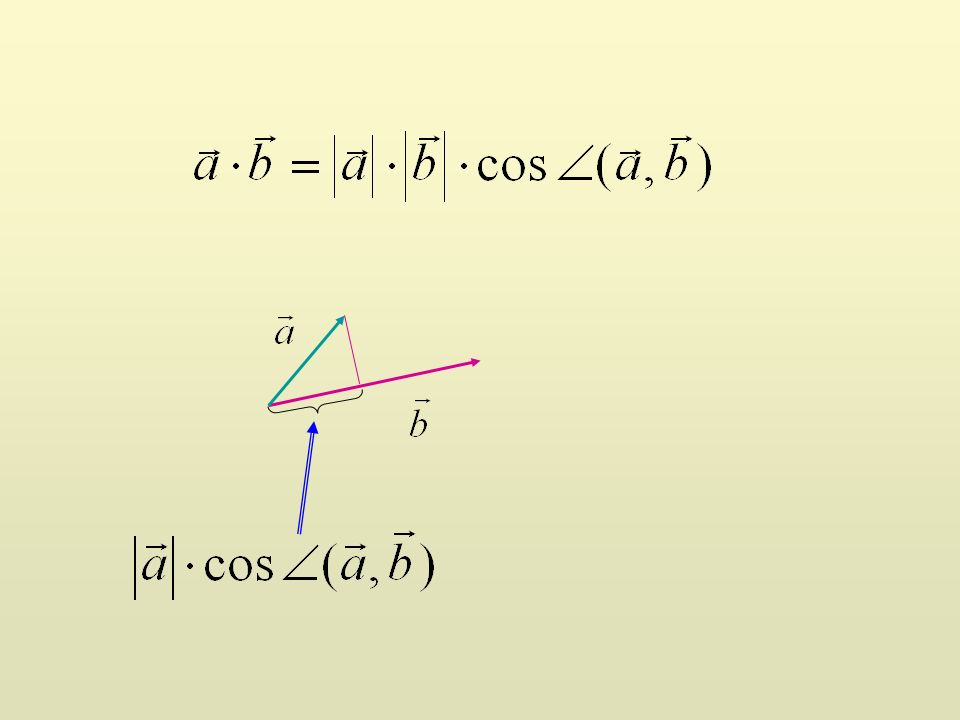
Iloczyn skalarny wektorów: lub przy pomocy składowych wektorów w układzie kartezjańskim jako: Iloczyn skalarny dla wektorów prostopadłych jest równy zeru.

25
Iloczyn wektorowy: jest wektorem prostopadłym do płaszczyzny utworzonej przez obydwa wektory Długość wektora : jest równa polu równoległoboku zbudowanego na wektorach Iloczyn wektorowy wektorów równoległych jest równy zeru.

27
Składowe wektora w układzie kartezjańskim, możemy wyznaczyć obliczając wyznacznik:.

28
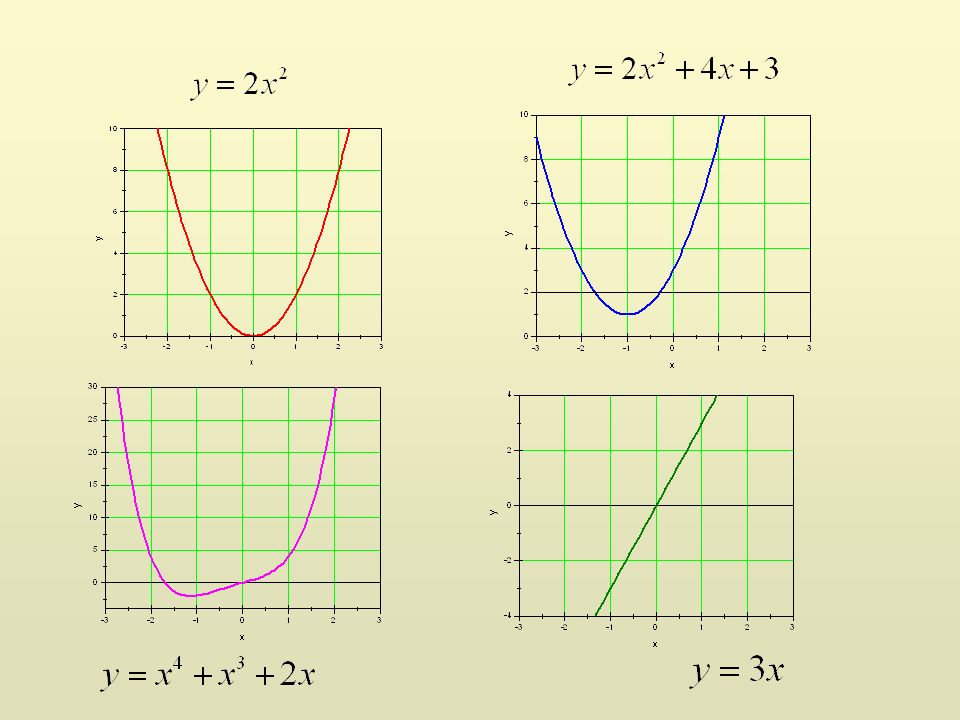
Elementy analizy matematycznej Funkcje Zmienna y nazywa się zmienną zależną albo funkcją zmiennej x jeśli przyjmuje określone wartości dla każdej wartości zmiennej x w jej pewnym przedziale zmienności. lub

30
Pochodna funkcji x y A(x o,y o ) B(x 1,y 1 ) ∆y ∆x Pochodna funkcji w danym punkcie jest równa współczynnikowi kierunkowemu stycznej Równanie prostej
 B(x 1,y 1 ) ∆y ∆x Pochodna funkcji w danym punkcie jest równa współczynnikowi kierunkowemu stycznej Równanie prostej")
32
1 c = const 2 3 4 Podstawowe wzory rachunku różniczkowego

33
5 6 Pochodna funkcji złożonej

34
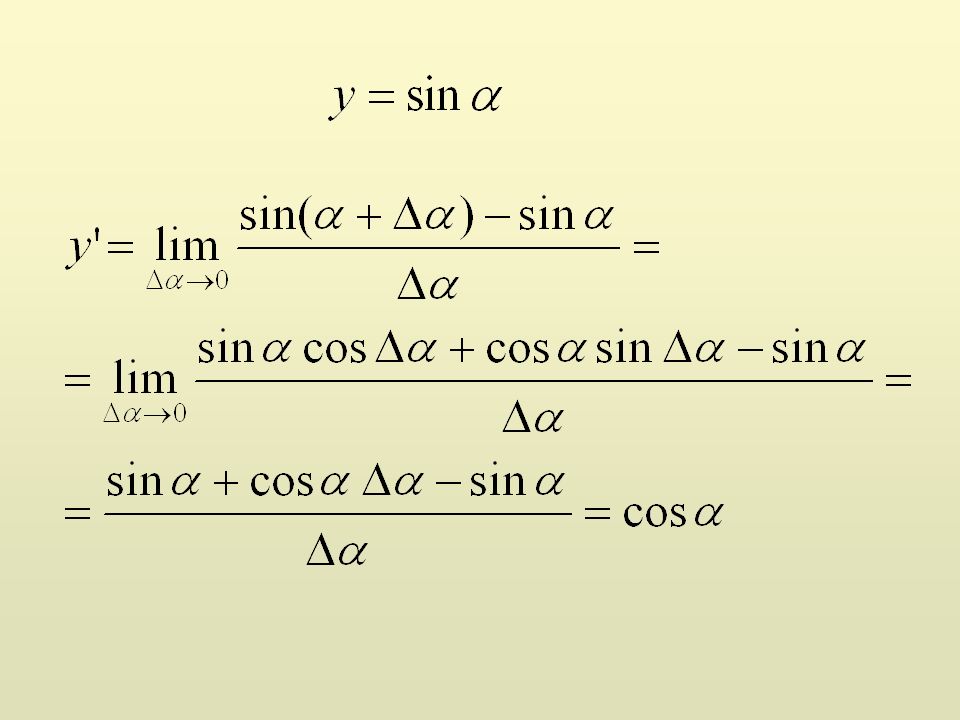
Pochodne funkcji elementarnych y=f(x)y’y=f(x)y’ x1cosx-sinx xnxn nx n-1 tgx1/cos 2 x exex exex ctgx-1/sin 2 x lnxx -1 axax a x lna sinxcosx
y’y=f(x)y’ x1cosx-sinx xnxn nx n-1 tgx1/cos 2 x exex exex ctgx-1/sin 2 x lnxx -1 axax a x lna sinxcosx")
35
Rachunek całkowy – całka nieoznaczona Całką nieoznaczoną lub funkcją pierwotną funkcji y = f(x) nazywamy taką funkcję F(x), której pochodna jest równa danej funkcji f(x) Całkę nieoznaczoną zapisujemy symbolicznie jako
 nazywamy taką funkcję F(x), której pochodna jest równa danej funkcji f(x) Całkę nieoznaczoną zapisujemy symbolicznie jako")
36
Całki funkcji elementarnych

37
Całka oznaczona Funkcja y = f(x) jest ciągła w przedziale zmiennej x. a b Całka oznaczona jest równa polu ograniczonemu osią x i krzywą f(x)
.")
38
Przykład Całka oznaczona w przedziale

39
-2 3 3 y = x Pole trójkąta + -

40
Kinematyka punktu materialnego Punkt materialny – ciało obdarzone masą, ale nie posiadające objętości. Ruch postępowy każdego rzeczywistego obiektu można opisać jako ruch punktu materialnego.

41
Przemieszczenia liniowe wszystkich elementów samochodu są jednakowe

42
Przemieszczenie liniowe elementów pręta zależy od odległości od osi obrotu

43
Jest to promień wodzący poprowadzony z początku układu współrzędnych do tego punktu. Położenie punktu materialnego określa wektor położenia

44
Punkt 2 wybieramy blisko punktu 1

45
.. Wektor przemieszczenia opisujący zmianę położenia punktu materialnego z punktu opisanego wektorem położenia do punktu opisanego wektorem Wektor przemieszczenia podzielony przez czas, w którym to przemieszczenie nastąpiło jest prędkością średnią punktu materialnego Prędkość punktu materialnego w danej chwili ( t 0) jest prędkością chwilową
 jest prędkością chwilową.")
46
Wartość prędkości chwilowej jest zawsze liczbą dodatnią. Wektor prędkości jest zawsze styczny do toru poruszającego się punktu. v v

47
Przyspieszenie określa zmianę wektora prędkości w czasie. Przyspieszenie średnie Jeśli t 0, przyspieszenie chwilowe

49
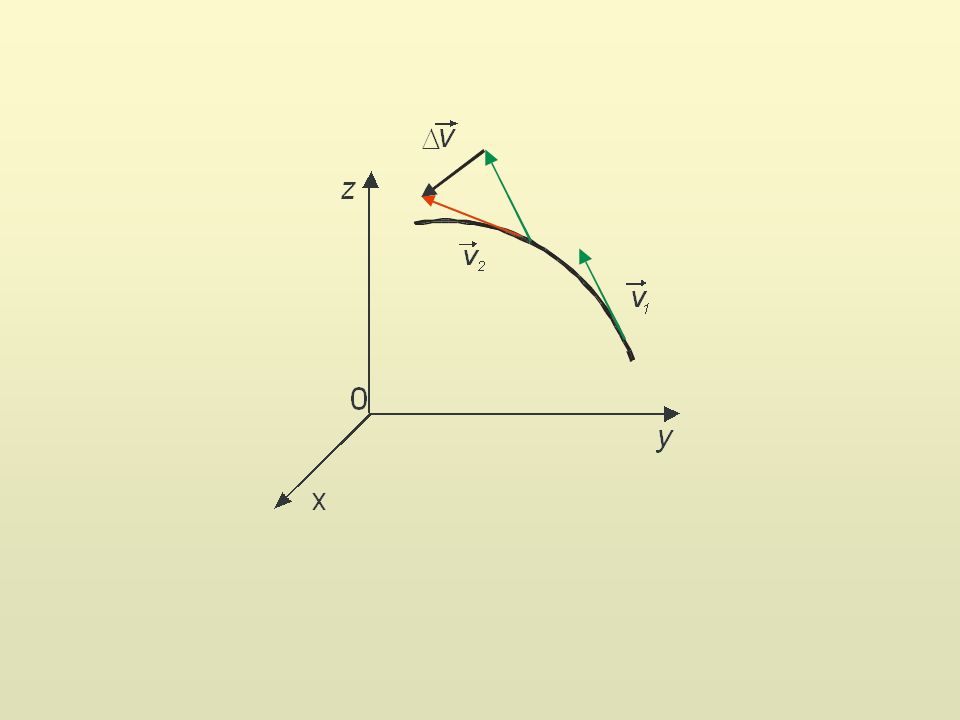
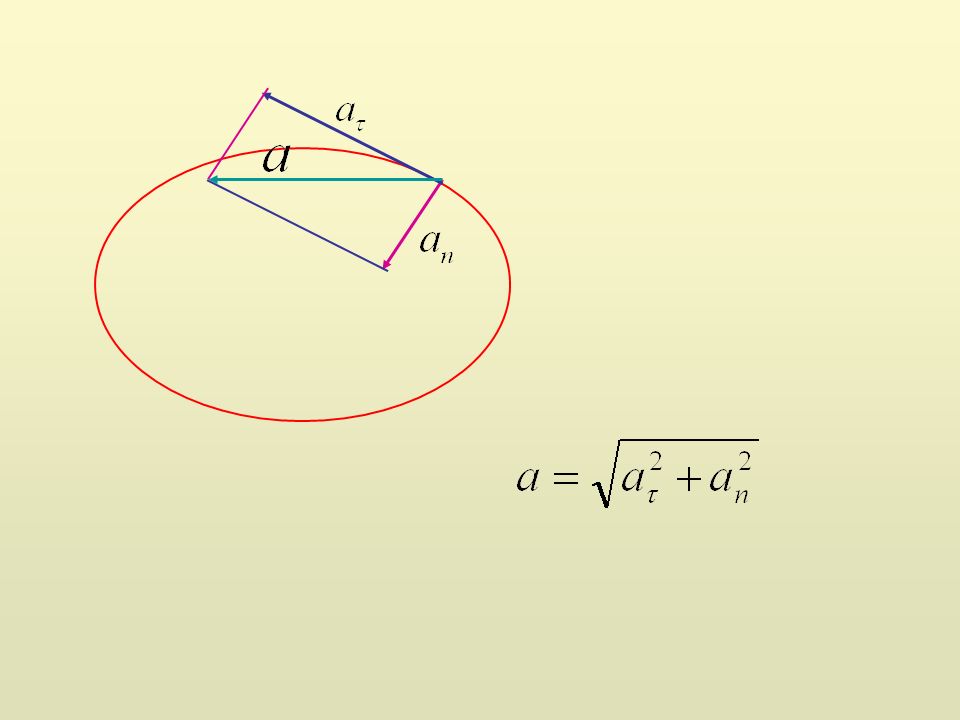
0 x y θ ∆θ∆θ v1v1 v2v2 Ruch krzywoliniowy - przyspieszenie styczne i normalne przyspieszenie styczne do toru przyspieszenie normalne, prostopadłe do toru

51
Przyspieszenie kątowe Prędkość kątowa i przyspieszenie kątowe

52
Radian jednostka kąta długość łuku promień r1r1 r2r2 s1s1 s2s2

53
Droga przebywana przez punkt materialny ruch jednostajny ruch jednostajnie zmienny – przyspieszony (a > 0) lub opóźniony (a < 0)
 lub opóźniony (a < 0)")
54
Dynamika punktu materialnego 1. Dane jest ciało o ściśle określonych własnościach 2. Ciało umieszczamy w znanym otoczeniu – potrafimy określić siły, które na niego działają Pytamy: jaki będzie ruch tego ciała?

56
+q +Q

57
k m F1F1 Jeżeli dodatkowo występuje tarcie pomiędzy masą m a powierzchnią, to f – współczynnik tarcia

58
I1I1 I2I2 F F

59
Zasady dynamiki Newtona I zasada dynamiki Każde ciało pozostaje w stanie spoczynku lub ruchu jednostajnego po linii prostej dopóty, dopóki nie zostanie zmuszone za pomocą wywierania odpowiednich sił do zmiany tego stanu. I zasada dynamiki stwierdza, że jeżeli w pobliżu danego ciała nie ma innych ciał (a więc nie działają siły), to można znaleźć taki układ odniesienia, w którym ciało nie będzie mieć przyspieszenia. Isaac Newton 1642-1721
, to można znaleźć taki układ odniesienia, w którym ciało nie będzie mieć przyspieszenia. Isaac Newton")
60
Układ S spoczywa, układ S’ porusza się ze stałą prędkością v.

61
Obserwator znajdujący się w układzie S’ stwierdza: chłopiec spoczywa Obserwator znajdujący się w układzie S stwierdza: chłopiec porusza się z prędkością v = const. Obydwaj obserwatorzy stwierdzą” przyspieszenie chłopca a = 0. Fakt, ze ciało pozostaje w spoczynku lub porusza się ze stałą prędkością, jeśli nie przykładamy do niego żadnej siły wiąże się z właściwością materii zwaną bezwładnością (inercją). Układy, w których obowiązuje I zasada dynamiki nazywamy układami inercjalnymi.
. Układy, w których obowiązuje I zasada dynamiki nazywamy układami inercjalnymi..")
62
II zasada dynamiki Jeżeli na ciało działa wypadkowa siła to przyspieszenie tego jest wprost proporcjonalne do działającej siły a odwrotnie do masy ciała. Jeśli określimy siły działające na ciało, to znając warunki początkowe możemy wyznaczyć położenie ciała, jego prędkość i przyspieszenie w dowolnej chwili.

63
Równanie jest równaniem wektorowym.

64
Z II zasady dynamiki wynika - pęd ciała. Siła działająca na ciało jest równa szybkości zmian pędu ciała. Rozwiązując ostatnie równanie otrzymamy Zmiana pędu ciała jest równa popędowi działającej siły popęd siły

65
III zasada dynamiki Wszelkie działanie jest równe przeciwdziałaniu. Jeżeli ciało A działa na ciało B siłą to ciało B działa na ciało A siłą równą co do wartości, ale o przeciwnym zwrocie

66
Zasada zachowania pędu Założenia: układ składa się z dwóch oddziałujących ze sobą cząstek nie ma żadnych sił zewnętrznych działających na ten układ. Z II zasady dynamiki wynika, że z III zasady dynamiki Dopóki rozpatrujemy tylko siły wewnętrzne całkowity pęd układu jest stały. Zwiększenie pędu jednej cząstki musi spowodować zmniejszenie pędu drugiej cząstki.

67
Uogólnienie dla układu N ciał Napęd odrzutowy

68
Nieinercjalne układy odniesienia - układy poruszające się prostoliniowo z przyspieszeniem: układ S’ porusza się prostoliniowo z przyspieszeniem a o względem układu inercjalnego S

69
prędkość punktu P względem układu S prędkość punktu P względem układu S’ prędkość układu S’ (prędkość unoszenia) Przyspieszenie
 Przyspieszenie")
70
. siły bezwładności działające na punkt materialny – pseudosiły, siły pozorne Zwrot wektora sił bezwładności jest przeciwny do zwrotu wektora przyspieszenia siły rzeczywiście działające na punkt materialny pochodzące od otoczenia II zasada dynamiki w układzie nieinercjalnym

71
-układy obracające się: a)siła odśrodkowa – działa na każde ciało znajdujące się w odległości od osi obrotu b) siła Coriolisa – działa na ciało poruszające się z prędkością względem układu obracającego się.
siła odśrodkowa – działa na każde ciało znajdujące się w odległości od osi obrotu b) siła Coriolisa – działa na ciało poruszające się z prędkością względem układu obracającego się.")
72
Siła Coriolisa na Ziemi Gustave Gaspard de Coriolis 1792 - 1843.

73
Czy laboratorium znajdujące się na powierzchni Ziemi jest układem inercjalnym? Ziemia wykonuje dwa ruchy obrotowe: a)wokół własnej osi przyspieszenie dośrodkowe b) wokół Słońca przyspieszenie dośrodkowe Tak, ale ze względu na niewielkie wartości przyspieszeń tę „nieinercjalność” można pominąć w zjawiskach, które będziemy omawiać.
wokół własnej osi przyspieszenie dośrodkowe b) wokół Słońca przyspieszenie dośrodkowe Tak, ale ze względu na niewielkie wartości przyspieszeń tę „nieinercjalność można pominąć w zjawiskach, które będziemy omawiać..")
74
Wówczas równanie to jest słuszne w granicy, gdy - toru krzywoliniowego nie można dokładnie rozłożyć na skończoną liczbę odcinków prostoliniowych. Praca – iloczyn skalarny wektorów siły i przemieszczenia x yFpFp r1r1 r2r2 rr Drogę rozkładamy na N odcinków liniowych takich, że na każdym z nich

75
Pracę definiujemy jako: a) Stała siła W
 Stała siła W")
76
b) Siła zmienna, np. rozciągamy sprężynę: W
 Siła zmienna, np. rozciągamy sprężynę: W")
77
Prawo zachowania energii prawa zachowania są niezależne od własności toru, a często również od własności danej siły prawa zachowania mają zastosowanie nawet wtedy, gdy siły są nieznane prawa zachowania stanowią dogodną pomoc w rozwiązywaniu zagadnienia ruchu cząstki. Cząstka o masie m nie jest poddana działaniu żadnej siły. W chwili t = 0 do cząstki przyłożono siłę

78
energia kinetyczna cząstki praca wykonana przez przyłożoną siłę jest równa zmianie energii kinetycznej cząstki praca wykonana na cząstce przez siłę

79
Siły zachowawcze x y A B

80
Praca wykonana przez siłę zachowawczą po drodze zamkniętej jest równa zeru. Praca wykonana przez siłę zachowawczą nie zależy od kształtu toru. siły zachowawcze = siły potencjalne

81
Energia potencjalna Przykładamy do ciała siłę F p równoważącą wszystkie inne siły działające na ciało. Wówczas E k = const. Praca wykonana przez siłę F p podczas przenoszenia tego ciała z punktu A do punktu B pola zachowawczego = zmianie energii potencjalnej ciała Energia potencjalna ciała w danym punkcie pola wyznaczona jest z dokładnością do stałej addytywnej

82
Jeśli siłę przyłożoną zastąpimy siłą rzeczywiście działającą na ciało to energia potencjalna ciała w danym punkcie pola lub względem punktu położonego w nieskończoności Jeśli punkt A , wówczas i energia potencjalna ciała względem nieskończoności

83
Zasada zachowania energii mechanicznej Na cząstkę działa siła suma sił zachowawczych suma sił niezachowawczych Praca wykonana przez siłę

84
Praca wykonana przez dowolne siły podczas przenoszenia ciała z punktu A do B = zmianie energii kinetycznej ciała Praca wykonana przez siły zachowawcze = zmianie energii potencjalnej ciała

85
Zmiana całkowitej energii mechanicznej układu równa jest pracy sił niezachowawczych. Jeśli na ciało (układ ciał) działają tylko siły zachowawcze wówczas energia mechaniczna jest stała. energia całkowita w punkcie B pola energia całkowita w punkcie A pola (filmy 2)
 działają tylko siły zachowawcze wówczas energia mechaniczna jest stała. energia całkowita w punkcie B pola energia całkowita w punkcie A pola (filmy 2).")
86
Dynamika ruchu obrotowego: punktu materialnego bryły sztywnej Bryła sztywna – zbiór punktów, przy czym dla dowolnych dwóch punktów A i B ich wzajemna odległość r AB jest stała w czasie, niezależnie od przyłożonej siły. A B r AB

87
Moment siły ramię siły kierunek działania siły

88
dla punktu materialnego Moment pędu punktu materialnego

89
II zasada dynamiki dla ruchu obrotowego wokół stałej osi obrotu Moment siły działającej na punkt materialny jest proporcjonalny do przyspieszenia kątowego jakie ten punkt uzyskuje. Współczynnikiem proporcjonalności jest moment bezwładności. Dla punktu materialnego

90
na punkt materialny działa zewnętrzny moment siły, to zmienia się moment pędu tego punktu materialnego

91
Układy punktów materialnych Dla układu zawierającego n punktów materialnych zapiszemy: oraz Zmiana całkowitego momentu pędu układu punktów materialnych w jednostce czasu względem początku inercjalnego układu odniesienia jest równa sumie zewnętrznych momentów sił działających na układ

92
moment bezwładności układu punktów materialnych względem danej osi obrotu moment bezwładności bryły sztywnej względem danej osi obrotu Energia kinetyczna i-tego punktu materialnego Energia kinetyczna układu punktów materialnych Energia kinetyczna w ruchu obrotowym

94
Twierdzenie Steinera

95
Ogólna postać II zasady dynamiki dla ruchu obrotowego Szybkość zmian momentu pędu jest równa momentowi siły analogicznie do

96
Zasada zachowania momentu pędu Moment pędu jest stały gdy nie działa zewnętrzny moment siły. Związek pomiędzy krętem a prędkością kątową Jeśli moment pędu jest zachowany, to

Podobne prezentacje