Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
3. Równowaga statyczna i dynamiczna w skali makro- i mikroskopowej.
Podstawowe pojęcia opisujące ruch

2
Opis ruchu. Nie istnieje ani absolutny stan ruchu, ani absolutny stan spoczynku. Nie możemy powiedzieć, że wybrane ciało porusza się lub nie, o ile nie ustalimy, względem czego określamy jego położenie. Aby mówić, że ciało się porusza, musimy znaleźć dla niego punkt odniesienia. Najważniejszą cechą ruchu jest jego względność. Ruch jest względny, ponieważ w zależności od przyjętego układu odniesienia to samo ciało może być równocześnie w ruchu i w spoczynku. Np.: Pasażer samochodu jest w spoczynku względem kierowcy (nie zmienia położenia względem niego), ale jest w ruchu względem drzewa stojącego na drodze (zmienia położenie względem drzewa). Z kolei drzewo jest w ruchu względem samochodu, ponieważ zmienia położenie w układzie współrzędnych związanym z samochodem.
, ale jest w ruchu względem drzewa stojącego na drodze (zmienia położenie względem drzewa). Z kolei drzewo jest w ruchu względem samochodu, ponieważ zmienia położenie w układzie współrzędnych związanym z samochodem.")
3
Ruch jest to zmiana położenia ciała w danym czasie, względem innego ciała lub układu ciał zwanego układem odniesienia. Układem odniesienia nazywamy pewne wybrane ciało lub grupę ciał, nie zmieniających wzajemnych odległości, względem których określa się położenie innych ciał w przestrzeni w dowolnej chwili.

4
Położenie ciała opisujemy przez podanie współrzędnych (x, y, z), dlatego z układem odniesienia wiążemy układ współrzędnych (X, Y, Z). Ciało przyjęte jako układ odniesienia jest wtedy reprezentowane przez początek układu współrzędnych (0, 0, 0). Wybierając układ odniesienia kierujemy się wyłącznie tym, aby opis ruchu w danym układzie był jak najprostszy. Każde ciało ma określone rozmiary i kształt. Jeśli wszystkie punkty ciała poruszają się jednakowo, to ruch ciała opisujemy, podając jak porusza się jeden wybrany punkt tego ciała, zwany punktem materialnym. Punktem materialnym nazywamy ciało posiadające masę i ciężar, lecz nie posiadające żadnej objętości.

5
Tor ruchu jest to zbiór wszystkich punktów przestrzeni, do których przesuwa się dany punkt materialny. Torem może być prosta lub krzywa, a w zależności od jego kształtu wyróżniamy ruch prostoliniowy lub krzywoliniowy. Drogą nazywamy długość przebytego odcinka toru. Jednostką drogi w układzie SI jest metr - [m] Do określenia położenia ciała nie wystarczy podanie jego położenia początkowego i przebytej drogi. Trzeba jeszcze wiedzieć, wzdłuż jakiej prostej i w którą stronę przemieszczało się ciało. Wielkość, która ma nie tylko wartość, ale też kierunek i zwrot, nazywamy wielkością wektorową. Aby opisać zmianę położenia ciała, wprowadzamy wielkość wektorową nazwaną przemieszczeniem (lub przesunięciem). Różnica dwóch wektorów położenia – to wektor przemieszczenia r lub x .
. Różnica dwóch wektorów położenia – to wektor przemieszczenia r lub x .")
6
Wartość przemieszczenia to długość odcinka AB, o który nastąpiło przemieszczenie; prosta, wzdłuż której odbywał się ruch określa kierunek wektora; zwrot wektora (grot strzałki) mówi nam, w którą stronę porusza się ciało. Wektor musi być przyłożony do ciała, którego kierunek ruchu przedstawia – to miejsce jest punktem przyłożenia. Najprostszy ruch w opisie to ruch, którego torem jest linia prosta a prędkość nie zmienia się. Gdy tor jest linią prostą to przemieszczenie i droga mają taką samą wartość: r = s. Rys. Tor (linia ciągła), droga S (linia przerywana), x przemieszczenie (czerwona strzałka).
, droga S (linia przerywana), x przemieszczenie (czerwona strzałka).")
7
Prędkość i przyspieszenie
Podstawowymi wielkościami charakteryzującymi każdy ruch są: prędkość i przyspieszenie. Prędkość Prędkość definiuje się jako zmianę położenia przypadającą na jednostkę czasu. Zapisuje się ją jako iloraz: gdzie Δt jest przedziałem czasu, w którym nastąpiła zmiana położenia o Δx. Tak określona prędkość może być zarówno dodatnia (oznacza to ruch w kierunku dodatnim osi Ox), jak i ujemna (ruch w kierunku ujemnym). Ma więc charakter wektorowy. Często interesuje nas jedynie wartość prędkości (szybkość) i wówczas posługujemy się wartością bezwzględna prędkości.
, jak i ujemna (ruch w kierunku ujemnym). Ma więc charakter wektorowy. Często interesuje nas jedynie wartość prędkości (szybkość) i wówczas posługujemy się wartością bezwzględna prędkości.")
8
Prędkością średnią nazywamy prędkość, która nie odzwierciedla rzeczywistej wartości prędkości. Podczas ruchu mogą następować zatrzymania, zwiększanie i zmniejszanie jej wartości. Prędkość średnia wyraża prędkość, jaką posiadałoby dane ciało, gdyby przebywało drogę s w czasie t ruchem jednostajnym. Pojęcie to odnosi się jedynie do wartości prędkości, a nie do wektora prędkości.

9
Prędkością chwilową nazywamy stosunek przemieszczenia, do czasu, w jakim ono nastąpiło. Prędkość chwilowa jest bliska rzeczywistej. Prędkość zmienia się i w każdej chwili jest inna. Jest to prędkość w danym punkcie toru. Wartość wektora prędkości jest równa szybkości ruchu. Oba te terminy (prędkość i szybkość) w języku potocznym są używane zamiennie. Podstawową jednostką prędkości liniowej jest metr na sekundę: 1 m/s. W praktyce bardzo wygodną jednostką jest kilometr na godzinę 1 km/h równy: 1 km/h = 0,278 m/s.
 w języku potocznym są używane zamiennie. Podstawową jednostką prędkości liniowej jest metr na sekundę: 1 m/s. W praktyce bardzo wygodną jednostką jest kilometr na godzinę 1 km/h równy: 1 km/h = 0,278 m/s.")
10
Δ v = v – v0, gdzie Δ v (delta) jest przyrostem prędkości w czasie Δt.
Przyspieszenie Przyspieszenie to wektorowa wielkość fizyczna określająca zmianę prędkości w danym czasie t, w którym zmiana ta nastąpiła. Jednostką przyspieszenia jest m/s2, natomiast symbol to mała litera "a". jednostka przyspieszenia jest ilorazem jednostki długości przez kwadrat jednostki czasu. Kierunek i zwrot wektora przyspieszenia jest zgodny z kierunkiem i zwrotem wektora zmiany prędkości ΔV. Δ v = v – v0, gdzie Δ v (delta) jest przyrostem prędkości w czasie Δt. m/s2 = (m/s)/s W ruchu jednostajnym przyspieszenie równe jest zeru. W ruchu jednostajnie przyspieszonym jest stałe. Jego wartość może być dodatnia lub ujemna. Gdy znak przyspieszenia pokrywa się ze znakiem prędkości, mamy do czynienia z przyspieszaniem, gdy ich kierunki są przeciwne - występuje opóźnienie.
 jest przyrostem prędkości w czasie Δt. m/s2 = (m/s)/s. W ruchu jednostajnym przyspieszenie równe jest zeru. W ruchu jednostajnie przyspieszonym jest stałe. Jego wartość może być dodatnia lub ujemna. Gdy znak przyspieszenia pokrywa się ze znakiem prędkości, mamy do czynienia z przyspieszaniem, gdy ich kierunki są przeciwne - występuje opóźnienie.")
11
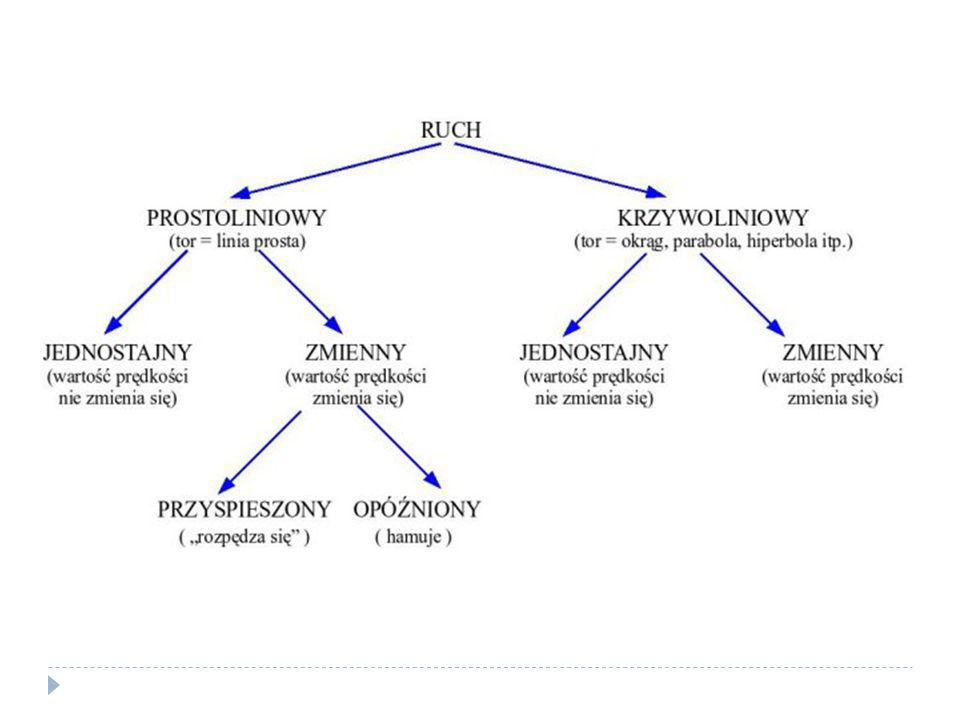
Rodzaje ruchów. Klasyfikacji ruchów dokonujemy ze względu na kształt toru lub stałość pewnych parametrów. Ze względu na rodzaj toru ruchy dzielimy na: – prostoliniowe – krzywoliniowe Ze względu na stałość pewnych parametrów (prędkość, przyspieszenie) ruchy dzielimy na: – jednostajne – niejednostajne
 ruchy dzielimy na: – jednostajne – niejednostajne.")
13
Ruch jednostajny prostoliniowy
Ruchem jednostajnym prostoliniowym nazywamy taki ruch ciała wzdłuż linii prostej, w którym w jednakowych odstępach czasu przebywa ono jednakowe odcinki drogi. Prędkością w ruchu jednostajnym nazywamy stosunek drogi do czasu, w jakim została ona przebyta: Prędkość jest wektorem o wartości równej stosunkowi drogi do czasu, w którym została ona przebyta, o kierunku i zwrocie zgodnym z kierunkiem i zwrotem wektora przemieszczenia. Jednostką prędkości, należącą do układu SI jest taka prędkość, jaką posiada ciało, które drogę jednego metra przebywa w czasie jednej sekundy [m/s]. Inne jednostki to np.: km/h; cm/s.

14
V = const. (constans = const. – łac. wartość stała)
Przekształcając wzór na prędkość, otrzymujemy wzór na drogę w ruchu prostoliniowym jednostajnym: S = V∙ t Na jego podstawie można ruch jednostajnie prostoliniowy określić jako taki, w którym droga przebywana przez ciało jest wprost proporcjonalna do czasu, a prędkość ma wartość stałą: V = const. (constans = const. – łac. wartość stała) Ruch ten można przedstawić graficznie z pomocą wykresu drogi s i prędkości V w funkcji czasu t.
 Ruch ten można przedstawić graficznie z pomocą wykresu drogi s i prędkości V w funkcji czasu t.")
15
Jest to wykres drogi w funkcji czasu s(t) dla ruchu jednostajnego prostoliniowego z drogą początkową s0 i bez niej. Wykresem jest linia prosta nachylona do osi t pod pewnym kątem α. Z wykresu można odczytać wartość prędkości ciała jako tangens kąta nachylenia prostej do osi czasu V = tgα, tgα = s1/t1= s2/t2 = V Im większe jest zatem nachylenie prostej, tym większa jest prędkość ciała.

16
W ruchu jednostajnym prostoliniowym szybkość nie zmienia się, co na wykresie przedstawia się następująco: Drogę można obliczyć jako pole figury utworzonej przez wykres zależności szybkości od czasu. Jak widać droga przebyta w danym czasie jest równa polu powierzchni prostokąta o długościach boków równych wartości prędkości oraz wartości czasu w jakim odbywał się ten ruch.

17
Ruch jednostajnie przyspieszony
Ruch jednostajnie przyspieszony to ruch, w którym wartość, kierunek i zwrot wektora przyspieszenia są stałe: a = const. Stały kierunek i zwrot wektora przyspieszenia jest możliwy tylko w ruchu prostoliniowym. Wobec tego ruch jednostajnie przyspieszony musi być ruchem prostoliniowym, czyli ruchem, w którym wartość prędkości jest równa szybkości. Stała wartość przyspieszenia oznacza, że w ciągu każdej sekundy szybkość (wartość prędkości) wzrasta o tyle samo: Δ v = v – v0, gdzie Δ v (delta) jest przyrostem prędkości w czasie Δt.
 wzrasta o tyle samo: Δ v = v – v0, gdzie Δ v (delta) jest przyrostem prędkości w czasie Δt.")
18
We wzorze v0 oznacza szybkość początkową (w chwili t = 0), a v oznacza szybkość po czasie t. W takim ruchu wartość przyspieszenia średniego jest równa wartości przyspieszenia w każdej chwili czasu (chwilowego). Szybkość w tym ruchu rośnie w miarę upływu czasu zgodnie ze wzorem: v = v0 + a · t.

19
Wykres prędkości w funkcji czasu dla ruchu jednostajnie przyspieszonego umożliwia nam obliczenie drogi. Jak już wiadomo jest to pole pod wykresem. Zatem jeśli w ruchu występuje prędkość początkowa należy dodać do siebie pole prostokąta (s1) oraz pole trójkąta (s2).
 oraz pole trójkąta (s2)..")
20
Droga w tym ruchu rośnie wraz z upływem czasu zgodnie ze wzorem:
Jest to równanie paraboli y = ax2 + bx + c, w którym c = 0. Zatem wykres zależności drogi od czasu w ruchu jednostajnie przyspieszonym jest parabolą o ramionach skierowanych do góry (większy od zera współczynnik przy t 2) i przechodzącą przez początek układu współrzędnych (dla t = 0 mamy s = 0).
 i przechodzącą przez początek układu współrzędnych (dla t = 0 mamy s = 0).")
21
Wykres pokazuje, że droga przebyta w dowolnej sekundzie jest większa od drogi przebytej w poprzedniej sekundzie. Jest to cecha ruchu przyspieszonego.

22
W ruchu jednostajnie przyspieszonym przyspieszenie nie zmienia się, co na wykresie przedstawia się w następujący sposób: Z wykresu przyspieszenia w funkcji czasu możemy odczytać zmianę prędkości, jest to pole powierzchni pod wykresem. Jeśli w ruchu wystąpiła prędkość początkowa należy ją dodać do otrzymanego wyniku, aby uzyskać prędkość całkowitą po danym czasie.

23
Ruch jednostajnie opóźniony
Ruch jednostajnie opóźniony to taki ruch, w którym szybkość maleje w równych odstępach czasu o taką samą wartość. W ruchu jednostajnie opóźnionym szybkość w dowolnej chwili ruchu jest mniejsza niż szybkość początkowa. Zatem wartość Δ v = v – v0 < 0. Oznacza to, że wektor przyspieszenia w każdej chwili ma zwrot przeciwny do zwrotu wektora prędkości, gdy tymczasem w ruchu jednostajnie przyspieszonym wektor przyspieszenia ma zwrot zgodny ze zwrotem wektora prędkości.

24
W tym ruchu wektor przyśpieszenia ma stałą wartość i przeciwny zwrot do wektora prędkości, ale zgodny z kierunkiem i zwrotem wektora siły wypadkowej. W ruchu jednostajnie opóźnionym szybkość maleje wraz z upływem czasu według wzoru: W chwili t = 0 szybkość wynosi v0. W kolejnych chwilach czasu od szybkości początkowej odejmowana jest coraz większa liczba, co graficznie przedstawia wykres:

25
Zależność drogi od czasu w ruchu jednostajnie opóźnionym jest równaniem kwadratowym o ujemnym współczynniku stojącym przy t 2: Na wykresie taka zależność ma kształt paraboli o ramionach zwróconych w dół:

27
Ruch niejednostajny. Ruch, podczas którego prędkość ciała zmienia swoją wartość w miarę upływu czasu, nazywamy ruchem niejednostajnym. Dla tego ruchu charakterystyczne są prędkość chwilowa i prędkość średnia.

28
Ruch jednostajny po okręgu.
W ruchu jednostajnym po okręgu prędkość się nie zmienia, a więc przebywana droga (liczona wzdłuż łuku) ma w każdej kolejnej sekundzie taką samą długość jako w poprzedniej. W ruchu jednostajnym po okręgu przyspieszenie (jako wektor) nie jest równe zero, mimo że wartość prędkości nie zmienia się. Z dwóch składowych przyspieszenia: stycznej i normalnej tylko jedna ma wartość zero. - składowa styczna (zmieniająca wartość prędkości) ma wartość zero - składowa normalna (zmieniająca kierunek prędkości) jest niezerowa Jest tak, ponieważ kierunek prędkości ulega ciągłej zmianie - prędkość musi być ciągle zakrzywiana do środka okręgu. Dlatego z ruchem jednostajnym po okręgu związana jest stała wartość przyspieszenia nazywanego przyspieszeniem dośrodkowym.
 ma w każdej kolejnej sekundzie taką samą długość jako w poprzedniej. W ruchu jednostajnym po okręgu przyspieszenie (jako wektor) nie jest równe zero, mimo że wartość prędkości nie zmienia się. Z dwóch składowych przyspieszenia: stycznej i normalnej tylko jedna ma wartość zero. - składowa styczna (zmieniająca wartość prędkości) ma wartość zero. - składowa normalna (zmieniająca kierunek prędkości) jest niezerowa. Jest tak, ponieważ kierunek prędkości ulega ciągłej zmianie - prędkość musi być ciągle zakrzywiana do środka okręgu. Dlatego z ruchem jednostajnym po okręgu związana jest stała wartość przyspieszenia nazywanego przyspieszeniem dośrodkowym.")
29
Przyspieszenie dośrodkowe to wektor, którego kierunek wyznaczony jest przez promień okręgu, a zwrot jest zorientowany do środka okręgu. Jego wartość zależy od szybkości oraz od promienia okręgu zgodnie ze wzorem:

30
Okres – T [s] Okres to czas, w którym zostanie zakreślony jeden pełny okrąg. Droga przebyta w tym czasie jest równa obwodowi okręgu: s= 2πr. Częstotliwość – f [Hz] Częstotliwość informuje nas o liczbie okrążeń (liczba całkowita lub ułamek) wykonanych w czasie jednej sekundy:
![Okres – T [s] Okres to czas, w którym zostanie zakreślony jeden pełny okrąg. Droga przebyta w tym czasie jest równa obwodowi okręgu:](http://slideplayer.pl/slide/2663763/9/images/30/Okres+%E2%80%93+T+%5Bs%5D+Okres+to+czas%2C+w+kt%C3%B3rym+zostanie+zakre%C5%9Blony+jeden+pe%C5%82ny+okr%C4%85g.+Droga+przebyta+w+tym+czasie+jest+r%C3%B3wna+obwodowi+okr%C4%99gu%3A.jpg "s= 2πr. Częstotliwość – f [Hz] Częstotliwość informuje nas o liczbie okrążeń (liczba całkowita lub ułamek) wykonanych w czasie jednej sekundy:")
31
LITERATURA: D.Halliday, R.Resnik, J.Walker, Podstawy fizyki. T 1, Mechanika, PWN, Warszawa, 2006. J. Blinowski, W. Zielicz, Fizyka i astronomia cz.1. Podręcznik dla Liceum ogólnokształcącego., WSiP, Warszawa, 2002 Kubica, E. Wnuczak, R. Żuczkowski, Fizyka dla wyższych szkół technicznych. T 1, PWN, Warszawa, 1974. M. Skorko, Fizyka. Podręcznik dla studentów wyższych technicznych studiów zawodowych dla pracujących., PWN, Warszawa 1973. K. Gębura, A. Maryanowska, B. Mól, B. Śniadek, Impuls.Fizyka dla klasy 2 gimnazjum., LektorKlett, Poznań 2000.

Podobne prezentacje