Wykład 12 Metoda linii pierwiastkowych. Regulatory. Automatyka Wykład 12 Metoda linii pierwiastkowych. Regulatory.
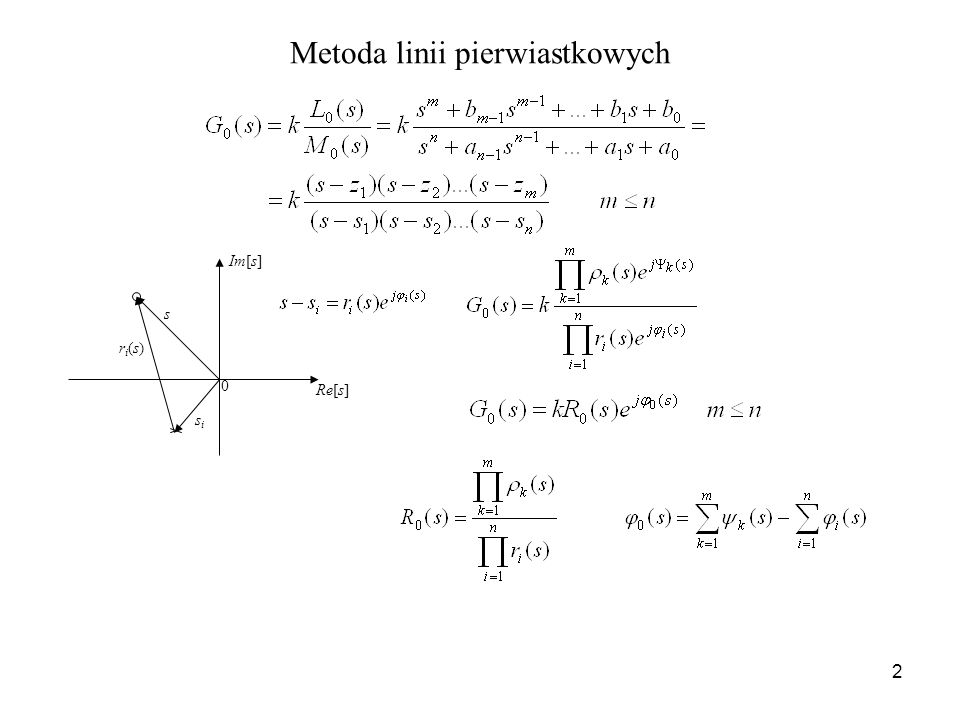
Metoda linii pierwiastkowych si Im[s] Re[s] ri(s)
Transmitancja operatorowa układu zamkniętego Przykład 1. Znaleźć linie pierwiastkowe układu zamkniętego o schemacie blokowym jak na rysunku. k _ W(s) Y(s) Rozwiązanie: Transmitancja operatorowa układu zamkniętego (punkty wyjścia) są liczbami ujemnymi. są liczbami zespolonymi.
Linie pierwiastkowe -10 k = 0 Re[s] Im[s] k = 25 k > 25 -5
Im[s] 4 1 > k 4 1 = k k = 0 k = 0 - 1 Re[s] 4 1 > k
Regulator proporcjonalny (P) Regulatory Ze względu na własności dynamiczne rozróżnia się cztery rodzaje regulatorów liniowych: proporcjonalne (typu P), proporcjonalno-całkujące (typu PI), proporcjonalno-różniczkujące (typu PD), proporcjonalno-całkująco-różniczkujące (typu PID). Regulator proporcjonalny (P)
Regulator proporcjonalno-całkujący (PI) h kp Ti t
kp Im[Gr(j)] Re[Gr(j)] =
Charakterystyki logarytmiczne regulatora PI Lm() [dB] -20 dB/dek 20log kp () =1/Ti 0o -45o -90o
Struktury regulatora PI struktura równoległa kp E(s) U(s) + struktura na wzmacniaczu o bardzo dużym wzmocnieniu z ujemnym sprzężeniem zwrotnym k Gsp(s) _ E(s) U(s)
_ + R1 Uwe(s) Uwy(s) R2 C
Regulator proporcjonalno-różniczkujący (PD) kp h
Dla kpTd Td t u(t) Transmitancja operatorowa regulatora PD
Transmitancja widmowa regulatora PD Charakterystyka amplitudowo-fazowa Im[Gr(j)] kp = 0 Re[Gr(j)]
Charakterystyki logarytmiczne Lm() [dB] +20 dB/dek () = 1/Td 45o 0o 90o 20logkp
Struktury regulatora PD struktura równoległa E(s) U(s) + Tds struktura na wzmacniaczu o bardzo dużym wzmocnieniu z ujemnym sprzężeniem zwrotnym k _ E(s) U(s)
Uwy(s) R1 C R2 Uwe(s) _ +
Regulator PD z inercją (rzeczywisty). Transmitancja operatorowa Odpowiedź skokowa t kp T h
Charakterystyka amplitudowo-fazowa Im[Gr] Re[Gr] = kp(1+Td/T) =0 kp
Charakterystyki logarytmiczne Lm() () 1/(Td+T) 1/T