Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Podstawowe elementy liniowe
Własności statyczne i dynamiczne

2
Elementy liniowe klasyfikuje się najczęściej ze względu na ich własności dynamiczne. Wyróżniamy sześć grup elementów podstawowych: Bezinercyjne (proporcjonalne) Inercyjne Całkujące Różniczkujące Oscylacyjne Opóźniające. Własności statyczne określa charakterystyka statyczna, a własności dynamiczne równanie różniczkowe, transmitancja operatorowa i widmowa a także charakterystyki czasowe i częstotliwościowe.
 Inercyjne. Całkujące. Różniczkujące. Oscylacyjne. Opóźniające. Własności statyczne określa charakterystyka statyczna, a własności dynamiczne równanie różniczkowe, transmitancja operatorowa i widmowa a także charakterystyki czasowe i częstotliwościowe.")
3
Człon bezinercyjny (proporcjonalny)
Ogólna postać równania elementu bezinercyjnego jest następująca: y = k x , gdzie y – wielkość wyjściowa, x – wielkość wejściowa, k – współczynnik proporcjonalności (wzmocnienia). Transmitancja elementu bezinercyjnego jest równa współczynnikowi wzmocnienia:
. Transmitancja elementu bezinercyjnego jest równa współczynnikowi wzmocnienia:")
4
Odpowiedzią na skok jednostkowy członu proporcjonalnego jest skok o wartości k.
h(t) k 1 t Charakterystyki częstotliwościowe są linią prostą o stałym wzmocnieniu z przesunięciem fazowym równym 0.
 k. 1. t. Charakterystyki częstotliwościowe są linią prostą o stałym wzmocnieniu z przesunięciem fazowym równym 0.")
5
- + R1 R2 R2 R1 Przykłady realizacji członu proporcjonalnego:
dzielnik napięciowy mnożenie przez stałą (wzmacniacz operacyjny) R1 R2 - + R1 R2
 R1. R R1. R2.")
6
Człon inercyjny I rzędu
Ogólna postać równania różniczkowego elementu inercyjnego pierwszego rzędu jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa [s]

7
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

8
Transmitancja widmowa jest następująca:
Stąd

9
Charakterystyki częstotliwościowe członu inercyjnego I rzędu wyglądają następująco:

10
Przykładem układu inercyjnego I rzędu jest filtr dolnoprzepustowy RC, w którym sygnałem wejściowym i wyjściowym jest napięcie, lub silnik prądu stałego (lub indukcyjny 3-fazowy), w którym skokowe włączenie zasilania jest sygnałem wymuszającym a wyjściem jest prędkość kątowa wału silnika. R C

11
Człon całkujący idealny
Ogólna postać równania różniczkowego elementu całkującego idealnego jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia W przypadku szczególnym (k ma wymiar odwrotności czasu), może zajść:
, może zajść:")
12
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

13
Transmitancja widmowa jest następująca:
Stąd

14
Charakterystyki częstotliwościowe członu całkującego idealnego wyglądają następująco:

15
Przykładem układu całkującego jest układ zawierający idealny kondensator C, przy czym sygnałem wejściowym jest prąd a wyjściowym napięcie na kondensatorze. C - + R C

16
Człon całkujący rzeczywisty
Ogólna postać równania różniczkowego elementu całkującego rzeczywistego (z inercją) jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa.
 jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa.")
17
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

18
Transmitancja widmowa jest następująca:
Stąd

19
Charakterystyki częstotliwościowe członu całkującego rzeczywistego wyglądają następująco:

20
Przykładem układu całkującego rzeczywistego jest układ filtru RC w układzie , lub silnik obcowzbudny prądu stałego, w którym wymuszeniem jest skok napięcia wirnika a wyjściem kąt obrotu wirnika. R C

21
Człon różniczkujący idealny
Ogólna postać równania różniczkowego elementu różniczkującego idealnego jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia.

22
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

23
Transmitancja widmowa jest następująca:
Stąd

24
Charakterystyki częstotliwościowe członu różniczkującego idealnego wyglądają następująco:

25
Przykładem układu różniczkującego idealnego jest kondensator idealny C , przy czym sygnałem wejściowym jest napięcie a wyjściowym prąd. C - + R C

26
Człon różniczkujący rzeczywisty
Ogólna postać równania różniczkowego elementu różniczkującego rzeczywistego (z inercją) jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa.
 jest następująca: Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa.")
27
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

28
Transmitancja widmowa jest następująca:
Stąd

29
Charakterystyki częstotliwościowe członu różniczkującego rzeczywistego wyglądają następująco:

30
Przykładem układu różniczkującego rzeczywistego jest układ filtru górnoprzepustowego RC.

31
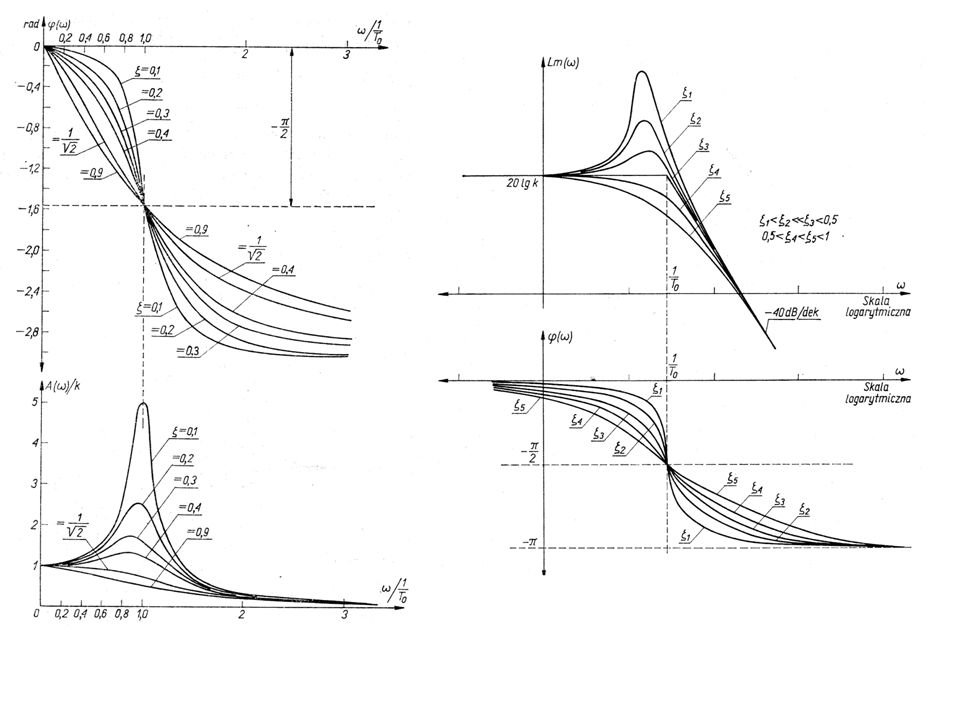
Człon oscylacyjny Ogólna postać równania różniczkowego elementu oscylacyjnego jest następująca: przy czym Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T1, T2 – stałe czasowe.

32
Inna postać równania różniczkowego elementu oscylacyjnego jest następująca:
przy czym Stąd wynika transmitancja: gdzie: k – współczynnik wzmocnienia, T – stała czasowa, – współczynnik tłumienia.

33
Odpowiedź na skok jednostkowy obliczamy na podstawie własności przekształcenia Laplace’a, otrzymując:

34
Odpowiedź członu oscylacyjnego na skok jednostkowy wygląda następująco:

35
Transmitancja widmowa jest następująca:
Stąd

36
Charakterystyki częstotliwościowe członu oscylacyjnego wyglądają następująco:

38
Przykładem układu oscylacyjnego jest układ RLC.

39
Człon opóźniający Równanie elementu opóźniającego ma postać: skąd na podstawie twierdzenia o przesunięciu rzeczywistym wynika transmitancja: Element opóźniający nie zniekształca sygnału wejściowego lecz jedynie przesuwa go w czasie.

40
Dziękuję za uwagę!

Podobne prezentacje



















 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")