T47 Przykłady sterowania elektrycznego Sterowanie pozycyjno-siłowe, podatne oraz impedancyjne
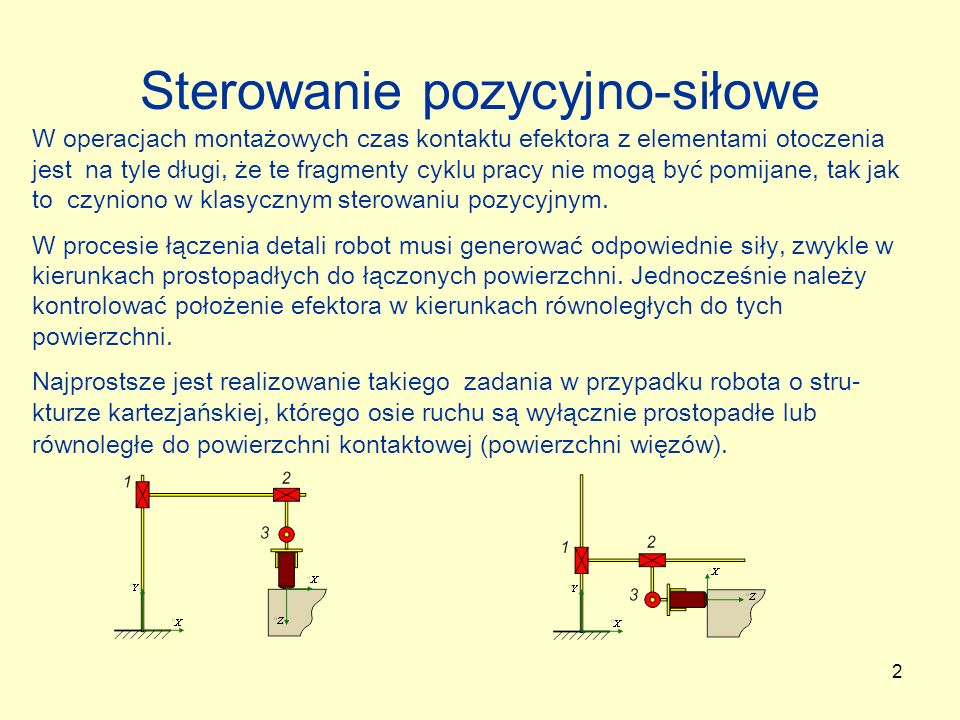
Sterowanie pozycyjno-siłowe W operacjach montażowych czas kontaktu efektora z elementami otoczenia jest na tyle długi, że te fragmenty cyklu pracy nie mogą być pomijane, tak jak to czyniono w klasycznym sterowaniu pozycyjnym. W procesie łączenia detali robot musi generować odpowiednie siły, zwykle w kierunkach prostopadłych do łączonych powierzchni. Jednocześnie należy kontrolować położenie efektora w kierunkach równoległych do tych powierzchni. Najprostsze jest realizowanie takiego zadania w przypadku robota o stru-kturze kartezjańskiej, którego osie ruchu są wyłącznie prostopadłe lub równoległe do powierzchni kontaktowej (powierzchni więzów).
Sterowanie pozycyjno-siłowe robota kartezjańskiego Układ sterowania pozycyjno-siłowego (Raibert, Craig; 1981): Diagonalne macierze przełącznikowe: Sygnał s jest zapamiętany wraz z trajektorią pozycyjno-siłową i do-datkowo może być korygowany na podstawie sygnałów z czujników sił lub czujników położenia (prędkości). Klasyczny przykład sterowania pozycyjno-siłowego (hybrydowego): Rola czujników sił w układach sterowania pozycyjno-siłowego.
Sterowanie pozycyjno-siłowe robota o dowolnej strukturze (1) Dla manipulatora o dowolnej strukturze można wyznaczyć tzw. reprezentację kartezjańską (Khatib; 1987), bazując na relacji opisującej proste zadanie kinematyki ( ) oraz zasadzie pracy wirtualnej ( ). Dla takiej reprezentacji można zastosować strukturę sterowania analogiczną do układu sterowania hybrydowego manipulatora kartezjańskiego. Yoshikawa (2000) nazywa to podejście klasycznym sterowaniem hybrydowym. Zaleca stosowanie regulatora PD w części odpowiadającej za śledzenie trajektorii pozycyjnej oraz regulatora PI w części odpowiadającej za śledzenie trajektorii siłowej. Ich nastawy dobierane są doświadczalnie.
Sterowanie pozycyjno-siłowe robota o dowolnej strukturze (2) Model dynamiki sztywnego manipulatora, na efektor którego działają siły zewnętrzne: Struktura tego równania pozwala na przeliczenie zadanej trajektorii pozycyjno-siłowej na przebieg momentu ( ). Można zastosować metodę obliczanego momentu w połączeniu z regulatorami odpowiednio PD i PI. Yoshikawa (2000) nazywa takie podejście dynamicznym sterowaniem hybrydowym. Przy założeniu idealnej kompensacji członów nieliniowych, dynamiczny uchyb położenia jest opisany wektorowym równaniem liniowym rzędu drugiego o stałych współczynnikach, które zależą jedynie od parametrów regulatora położenia. Z kolei dynamiczny uchyb siły jest opisany wektorowym równaniem liniowym rzędu pierwszego, również o stałych współczynnikach, zależnych od parametrów regulatora siły.
Pasywne sterowanie podatne (1) Przy praktycznych realizacjach sterowania hybrydowego mogą wystąpić kolizje mechaniczne lub niestabilności kontaktu efektora z elementami otoczenia. Podstawowe przyczyny: niedokładności w oszacowaniu położenia efektora względem elementów otoczenia, zmiana właściwości dynamicznych manipulatora po dojściu efektora do sztywnej powierzchni, opóźnienia czasowe w torze regulacji.
Pasywne sterowanie podatne (2) Wszystkie te nieprawidłowości mają mniejsze znacznie w manipulatorach, które charakteryzują się określoną podatnością. Podatność w i-tym kierunku: , przy i . Sztywność w i-tym kierunku: Pasywne elementy pośrednie służące do kontrolowanego powiększania podatności łańcucha kinematycznego: Modele do analizy stanów przejściowych:
Pasywne sterowanie podatne (3) Elementy podatne mogą być także umieszczane bezpośrednio w zespołach napędowych. Przykłady siłowników z szeregowymi elementami podatnymi firmy Yobotics: elektryczny hydrauliczny
Zastosowania siłowników z szeregowymi elementami podatnymi System wspomagający staw kolanowy:
Impedancja i admitancja elektryczna (1) Impedancja elektryczna jest miarą oporu pozornego dwójników zawierających elementy posiadające zdolność gromadzenia energii. Pojęcie impedancji jest najbardziej związane z liniowymi układami elektrycznymi podlegającymi pobudzeniom sinusoidalnie zmiennym. Jeżeli częstotliwość pobudzania układu jest stała w czasie, to quasi-ustalone przebiegi czasowe wszystkich prądów i napięć mają również charakter sinusoidalny. Każdy z tych przebiegów jest scharakteryzowany dwoma parametrami: amplitudą przesunięciem fazowym w stosunku do sygnału wymuszającego. Do jednoznacznego odwzorowywania takich przebiegów mogą być stosowane dwuelementowe wektory. Najpopularniejsze jest jednak przypisanie każdemu przebiegowi sinusoidalnemu liczby zespolonej, która posiada dwie składowe: rzeczywistą i urojoną. Na tym podejściu opiera się metoda symboliczna analizy układów liniowych poddanych wymuszeniom sinusoidalnym.
Impedancja i admitancja elektryczna (2) Prawo Ohma dla wartości symbolicznych impedancja (symboliczna) dwójnika Admitancja (symboliczna) dwójnika: R – rezystancja, X – reaktancja, G – konduktacja, B – susceptancja Źródła napięciowe i prądowe idealne i rzeczywiste, a impedancja wewnętrzna. Uogólnienie metody na przypadek stacjonarnych układów liniowych skończenie wymiarowych, poddanych działaniu dowolnych wymuszeń. Metoda operatorowa oparta na przekształceniu Laplace’a. Prawo Ohma dla transformat: impedancja operatorowa dwójnika admitancja operatorowa dwójnika
Analogie pomiędzy układami elektrycznymi i mechanicznymi Oscylacyjne układy liniowe: Moc chwilowa w układach elektrycznych i mechanicznych: Istnieją dwie możliwości zdefiniowania tych analogii biorąc pod uwagę podobieństwo powyższych wzorów. Pierwszą z nich jest przyjęcie tzw. analogii prędkość-prąd, drugą zaś przyjęcie analogii prędkość-napięcie.
Impedancja i admitancja w robotyce (1) Definicje impedancji i admitancji (Hogan 1984; 1985) : jeżeli obiekt posiada tę właściwość, że na podstawie wielkości wejściowej w postaci siły czynnej (np. siły mechanicznej, momentu sił, siły elektromotorycznej) generuje przepływ (np. prędkość mechaniczną w ruchu liniowym lub obrotowym, prąd elektryczny), to obiekt taki nazywany jest admitancją gdy wielkością wejściową obiektu jest przepływ a wielkością wyjściową jest siła czynna, to obiekt jest nazywany impedancją. Podstawowa wada tej definicji: w sytuacjach kontaktowych zachodzi konieczność wyróżniania admitancji i impedancji mechanicznych admitancja impedancja ? W rozumieniu Hogana admitancja czy też impedancja stanowią cechę obiektu, a nie wielkość charakteryzującą związki ilościowe pomiędzy wartościami sygnałów.
Impedancja i admitancja w robotyce (2) Pojęcia impedancji i admitancji w robotyce mogą być również rozumiane jako bezpośrednie przeniesienie pojęć „elektrycznych”. Uwagi: manipulator jest dynamicznym obiektem nieliniowym, można mówić jedynie o lokalnej impedancji lub admitancji mechanicznej (zachodzi potrzeba linearyzacji lub doświadczalnego wyznaczenia parametrów) manipulator jest obiektem operującym w przestrzeni, należy posługiwać się pojęciami macierzy impedancji (admitancji). definicja tych pojęć zależy od wyboru analogii pomiędzy układami mechanicznymi a elektrycznymi. . Równania definicyjne impedancji i admitancji oparte o transformaty wektorów prędkości kartezjańskich efektora i uogólnionych sił, przy stosowaniu analogii prędkość-napięcie:
Sterowanie przepływem energii w układach robotycznych Jeżeli w warunkach aktywnego kontaktu manipulatora z otoczeniem elementarna praca jest różna od zera, to następuje przepływ energii do otoczenia. Występować tu może dobrze znany z inżynierii elektrycznej efekt transferu energii biernej. Sterowanie przepływem energii w układach elektrycznych: . Przeniesienie na obszar robotyki tych zasad sterowania, przy zastoso-waniu np. analogii prędkość-napięcie (siła-prąd).
Sterowanie impedancyjne Won, Stramigioli i Hogan (1997): „Sterowanie impedancyjne polega na sprecyzowaniu jaka impedancja w określonym miejscu kontaktu robota z otoczeniem jest pożądana i uzyskiwaniu w miarę możliwości takiej impedancji. Cechą różniącą sterowanie impedancyjne od sterowania pozycyjno-siłowego jest usiłowanie wpływania na interakcyjne właściwości manipulatora, które są cechą charakterystyczną manipulatora i nie muszą pozostawać w związku z właściwościami obiektów, z którymi w kontakcie pozostaje manipulator.” Przykład „naturalnego” sterowanie pozycyjnego, pozycyjno-siłowego i sterowania impedancyjnego:
Sterowanie impedancyjne przy współpracy robotów Widok z boku Widok z góry .
Jednolite ujęcie impedancji mechanicznych i elektrycznych manipulatora
Zastosowanie sterowania impedancyjnego w robotyce Obszary zastosowań: wspólna realizacja operacji przez grupę robotów testowanie właściwości otoczenia robota roboty kroczące, biegające i skaczące Realizacja: modyfikacja naturalnych właściwości impedancyjnych napędu (np. napędy mięśniowe) lub układy ze sprzężeniem zwrotnym. Zmiana impedancji powoduje zmianę częstotliwości naturalnych oscylacji łańcucha kinematycznego Przykład aplikacji - RABBIT (Chevallerau, Abba i inni; 2003):
Podsumowanie Sterowanie impedancyjne = aktywne sterowanie podatne Impedancja wyjściowa robota Sterowanie impedancyjne = aktywne sterowanie podatne