Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Tachograf cyfrowy jako nowoczesne pokładowe urządzenie monitorujące – aspekty techniczne
Stanisław Mazurek Andrzej Wojciechowski Wojciech Gis Edward Menes

2
Co mierzy Tachograf Cyfrowy?
Pomiary dokonywane w tachografie: przejechany dystans prędkość pojazdu Pomiaru tych wielkości dokonuje się pośrednio za pomocą czujnika impulsowego umieszczonego na wyjściu skrzyni biegów

3
Prędkość pojazdu Prędkość wskazywana przez tachograf cyfrowy jest więc w istocie prędkością kątową wału przemnożoną przez współczynnik „W” (impulsy na kilometr)! Prędkość pojazdu V Prędkość kątowa wału „W” Imp/km Na wynik pomiaru wpływają: Dokładność oceny stałej „w” pojazdu, Dokładność odwzorowania częstotliwości impulsów z czujnika pojazdu Zjawisko poślizgu Zużycie opony Ugięcie opony
! Prędkość pojazdu V. Prędkość kątowa wału. „W Imp/km. Na wynik pomiaru wpływają: Dokładność oceny stałej „w pojazdu, Dokładność odwzorowania częstotliwości impulsów z czujnika pojazdu. Zjawisko poślizgu. Zużycie opony. Ugięcie opony.")
4
Błąd pomiaru prędkości i drogi
Całkowity dopuszczalny błąd w okresie dwu letniej eksploatacji +/- 6 km/h +/- 4% inne czynniki: +/- 2 km/h błąd wynikający ze zmiany efektywnego obwodu koła: +/- 2 km/h Promień toczny opony błąd prędkości wynikający z błędu oceny stałej w: +/- 1 km/h +/- 2% rt dokładność odwzorowania częstotliwości w zakresie prędkości V: km/h i stałej w: +/- 1 km/h +/- 1% Dystans Prędkość 1000 m

5
Dostęp do danych przechowywanych w tachografie cyfrowym i na kartach tachografowych

6
DANE NA KARCIE KIEROWCY
Dostępne informacje PAMIĘĆ TACHOGRAFU WYDRUKI NA PAPIERZE DANE NA KARCIE KIEROWCY

7
(Dane do pobrania z tachografu zamontowanego w pojeździe)
Struktura danych NAGŁÓWEK (Overview file) CERTYFIKATY BEZPIECZEŃSTWA IDENTYFIKACJA POJAZDU INFORMACJE O POPRZEDNIM POBRANIU DANYCH BLOKADY DANYCH PRZEDSIĘBIORSTW INFORMACJE O KONTROLI POJAZDU INNE DZIAŁANIA (Activities file) ZMIANY AKTYWNOŚCI KIEROWCY INFORMACJE O LOKALIZACJI NA TRASIE (KRAJ/REGION) INFORMACJE SZCZEGÓŁOWE PODCZAS WŁOŻENIA - WYJĘCIA KARTY PRZEJECHANY DYSTANS ZDARZENIA I BŁĘDY (Events & Faults) ZDARZENIA AWARIE INFORMACJE O KONTROLI PRĘDKOŚCI ZAREJESTROWANE PRZEKROCZENIA PRĘDKOŚCI AKTUALIZACJE CZASU ZEGARA TACHOGRAFU PRĘDKOŚĆ SZCZEGÓŁOWA (Detailed Speed) SZCZEGÓŁÓWE DANE O PRĘDKOŚĆI POJAZDU REJESTROWANE CO SEKUNDĘ W KAŻDEJ MINUCIE JAZDY DANE TECHNICZNE (Technical Data) INFORMACJE SZCZEGÓŁOWE O PRZEPROWADZO- NYCH PROCEDURACH KALIBRACJI DANE TECHNICZNE TACHOGRAFU I CZUJNIKA PREDKOŚCI Pojazd (Vehicle Unit) (Dane do pobrania z tachografu zamontowanego w pojeździe)
 CERTYFIKATY BEZPIECZEŃSTWA. IDENTYFIKACJA POJAZDU. INFORMACJE O POPRZEDNIM POBRANIU DANYCH. BLOKADY DANYCH PRZEDSIĘBIORSTW. INFORMACJE O KONTROLI POJAZDU. INNE. DZIAŁANIA. (Activities file) ZMIANY. AKTYWNOŚCI. KIEROWCY. INFORMACJE O LOKALIZACJI NA TRASIE (KRAJ/REGION) INFORMACJE SZCZEGÓŁOWE PODCZAS WŁOŻENIA - WYJĘCIA KARTY. PRZEJECHANY DYSTANS. ZDARZENIA I BŁĘDY. (Events & Faults) ZDARZENIA. AWARIE. INFORMACJE O KONTROLI PRĘDKOŚCI. ZAREJESTROWANE PRZEKROCZENIA PRĘDKOŚCI. AKTUALIZACJE CZASU ZEGARA TACHOGRAFU. PRĘDKOŚĆ SZCZEGÓŁOWA. (Detailed Speed) SZCZEGÓŁÓWE DANE O PRĘDKOŚĆI POJAZDU REJESTROWANE CO SEKUNDĘ W KAŻDEJ MINUCIE JAZDY. DANE TECHNICZNE. (Technical Data) INFORMACJE SZCZEGÓŁOWE O PRZEPROWADZO- NYCH PROCEDURACH KALIBRACJI. DANE TECHNICZNE TACHOGRAFU I CZUJNIKA PREDKOŚCI. Pojazd (Vehicle Unit) (Dane do pobrania z tachografu zamontowanego w pojeździe)")
8
Program do odczytu danych*
*na podstawie danych własnych oraz uzyskanych z tachografu cyfrowego

9
Karta Kierowcy (Driver Card)
Struktura danych Karta Kierowcy (Driver Card) IDENTYFIKATOR KARTY IDENTYFIKATOR PROCESORA KARTY TACHOGRAF IDENTYFIKATOR TYPU KARTY CERTYFIKATY OSTATNIE POBRANIE DANYCH Z KARTY INFORMACJE O ZDARZENIACH INFORMACJE O BŁĘDACH CZYNNOŚCI KIEROWCY PROWADZONE POJAZDY INFORMACJE O LOKALIZACJI NA TRASIE INFORMACJE O KONTROLACH WARUNKI SPECYFICZNE DANE OSOBOWE KIEROWCY I NUMERY IDENTYFIKACYJNE KARTY
 IDENTYFIKATOR KARTY. IDENTYFIKATOR PROCESORA KARTY. TACHOGRAF. IDENTYFIKATOR TYPU KARTY. CERTYFIKATY. OSTATNIE POBRANIE DANYCH Z KARTY. INFORMACJE O ZDARZENIACH. INFORMACJE O BŁĘDACH. CZYNNOŚCI KIEROWCY. PROWADZONE POJAZDY. INFORMACJE O LOKALIZACJI NA TRASIE. INFORMACJE O KONTROLACH. WARUNKI SPECYFICZNE. DANE OSOBOWE KIEROWCY I NUMERY IDENTYFIKACYJNE KARTY.")
10
Dostęp do danych KTO MA DOSTĘP DO DANYCH GROMADZONYCH NA KARTACH I W TACHOGRAFIE PRZEDSTAWICIELE PRAWA przy pomocy Kart Kontrolnych (CONTROL CARD) kontrole drogowe (roadside check), kontrole firm (company check). PRZEDSIĘBIORSTWA przy pomocy Kart Przedsiębiorstw (COMPANY CARD) archiwizacja danych, zarządzanie flotą. WARSZTATY przy pomocy Kart Warsztatowych (WORKSHOP CARD) analiza danych, archiwizacja danych w przypadku awarii.
 kontrole drogowe (roadside check), kontrole firm (company check). PRZEDSIĘBIORSTWA. przy pomocy Kart Przedsiębiorstw (COMPANY CARD) archiwizacja danych, zarządzanie flotą. WARSZTATY. przy pomocy Kart Warsztatowych (WORKSHOP CARD) analiza danych, archiwizacja danych w przypadku awarii.")
11
Życie tachografu cyfrowego

12
Diagram życia tachografu cyfrowego
Instalacja Aktywacja Kalibracja Eksploatacja Sprawdzanie/ inspekcja Naprawa/ sprzedaż Co 2 lata Sprzęt z drugiej ręki Koniec życia Nowy sprzęt

13
Definicje Instalacja - montaż urządzenia rejestrującego (lub jego części) w pojeździe. Aktywacja - operacja po zakończeniu której: systemy bezpieczeństwa urządzenia rejestrującego są w pełni sprawne, urządzenie rejestrujące zaczyna rejestrować czynności, zdarzenia, błędy. Kalibracja - wprowadzenie do pamięci urządzenia rejestrującego parametrów pojazdu. Parametry dotyczą identyfikacji pojazdu (VIN, VRN, RMS) i współczynniki pojazdu (w, k, l, wartość ograniczenia prędkości, wartość licznika przejechanych kilometrów, czas UTC). Kontrola/Inspekcja - operacje wykonywane w celu upewnienia się, że urządzenie rejestrujące działa poprawnie, a zapisane współczynniki odpowiadają współczynnikom rzeczywistym. Naprawa - każda czynność, wykonywana na głównym elemencie urządzenia rejestrującego, wymagająca odłączenia zasilania lub odłączenia od pozostałych elementów.
 i współczynniki pojazdu (w, k, l, wartość ograniczenia prędkości, wartość licznika przejechanych kilometrów, czas UTC). Kontrola/Inspekcja - operacje wykonywane w celu upewnienia się, że urządzenie rejestrujące działa poprawnie, a zapisane współczynniki odpowiadają współczynnikom rzeczywistym. Naprawa - każda czynność, wykonywana na głównym elemencie urządzenia rejestrującego, wymagająca odłączenia zasilania lub odłączenia od pozostałych elementów.")
14
Instalacja Instalacja jest wykonywana przez producenta pojazdu albo przez technika w warsztacie. Producent pojazdu musi wstępnie ustawić parametry pojazdu (poza numerem rejestracyjnym i krajem członkowskim, które mogą być domyślnie ustawione jako znaki zapytania). Fizyczne plomby nie są wymagane w miejscach, gdzie bezpieczeństwo gwarantowane jest przez elektroniczne systemy zabezpieczeń. Dlatego jedyną potrzebną plombą jest plomba na mocowaniu sensora ruchu do skrzyni biegów.
. Fizyczne plomby nie są wymagane w miejscach, gdzie bezpieczeństwo gwarantowane jest przez elektroniczne systemy zabezpieczeń. Dlatego jedyną potrzebną plombą jest plomba na mocowaniu sensora ruchu do skrzyni biegów.")
15
Aktywacja Przed aktywacją urządzenie rejestrujące musi przyjąć wszystkie wysyłane parametry bez potwierdzenia autentyczności (bez użycia karty warsztatowej) i nie zapisuje czynności, błędów, zdarzeń. Aktywacja uruchamiana jest przez pierwsze włożenie karty warsztatowej do jednostki pojazdowej (VU). Producent pojazdu musi dokonać aktywacji urządzenia rejestrującego przed wysłaniem pojazdu. Jeżeli potrzebna jest szczególna operacja parowania czujnika ruchu i jednostki pojazdowej, to musi być częścią aktywacji. Po aktywacji urządzenie rejestrujące w pełni wymusza kontrolę dostępu, a zapisywanie danych jest w pełni sprawne i zabezpieczone.
 i nie zapisuje czynności, błędów, zdarzeń. Aktywacja uruchamiana jest przez pierwsze włożenie karty warsztatowej do jednostki pojazdowej (VU). Producent pojazdu musi dokonać aktywacji urządzenia rejestrującego przed wysłaniem pojazdu. Jeżeli potrzebna jest szczególna operacja parowania czujnika ruchu i jednostki pojazdowej, to musi być częścią aktywacji. Po aktywacji urządzenie rejestrujące w pełni wymusza kontrolę dostępu, a zapisywanie danych jest w pełni sprawne i zabezpieczone.")
16
Kalibracja Kalibracja urządzenia rejestrującego jest możliwa kiedy włożona jest karta warsztatowa. Urządzenie rejestrujące musi przechowywać w pamięci zestaw parametrów wprowadzonych podczas pierwszej kalibracji pojazdu (pojazd oznaczony przez VIN) i w czasie ostatnich pięciu kalibracji (jeżeli w ciągu dnia wystąpiła więcej niż jedna kalibracja, tylko parametry ostatniej kalibracji są zapamiętywane). Numer identyfikacyjny warsztatu i data są także zapamiętywane. Karta warsztatowa posiada możliwość zapisywania czynności kalibracyjnych wykonywanych za pomocą tej karty.
 i w czasie ostatnich pięciu kalibracji (jeżeli w ciągu dnia wystąpiła więcej niż jedna kalibracja, tylko parametry ostatniej kalibracji są zapamiętywane). Numer identyfikacyjny warsztatu i data są także zapamiętywane. Karta warsztatowa posiada możliwość zapisywania czynności kalibracyjnych wykonywanych za pomocą tej karty.")
17
Naprawy Niektóre zdarzenia lub błędy takie jak odłączenie zasilania, odłącznie czujnika, otwarcie jednostki pojazdowej mogą się wydarzyć w czasie napraw. Dlatego jednostka pojazdowa nie zapisuje tych zdarzeń lub błędów jeżeli włożona jest karta warsztatowa. Lista pomniejszych dopuszczalnych czynności konserwujących nie zakwalifikowanych jako naprawy musi być wydana przez producenta urządzenia i zaaprobowana w czasie testów urządzenia. Po naprawach musi następować inspekcja i ewentualnie kalibracja.

18
Przykładowa procedura montażu i uruchamiania tachografu cyfrowego

19
Problemy i pytania Czy punkt dilerski może być zaliczony do obszaru producenta pojazdów (premises) i przez to może mieć uprawnienia wynikające z wymagania 243 Aneksu I B, tzn. może aktywować zainstalowane przez producenta tachografy? Czy w Polsce punkt dilerski może uzyskać status stacji tachografowej (we Francji jest to niemożliwe)? W takiej sytuacji punkt dilerski mógłby tylko aktywować zainstalowane poprzednio przez producenta tachografy, oraz wprowadzać numer rejestracyjny VRN i kod kraju (RMS), oraz inne (stan licznika, czas) bez konieczności kalibracji i sprawdzania błędu.
 i przez to może mieć uprawnienia wynikające z wymagania 243 Aneksu I B, tzn. może aktywować zainstalowane przez producenta tachografy Czy w Polsce punkt dilerski może uzyskać status stacji tachografowej (we Francji jest to niemożliwe) W takiej sytuacji punkt dilerski mógłby tylko aktywować zainstalowane poprzednio przez producenta tachografy, oraz wprowadzać numer rejestracyjny VRN i kod kraju (RMS), oraz inne (stan licznika, czas) bez konieczności kalibracji i sprawdzania błędu.")
20
Problemy i pytania Jakie będą dopuszczalne w Polsce metody oceny parametrów W (stała pojazdu) i L (efektywny obwód koła) w procesie kalibracji. Możliwości: Dane producenta, własne obliczenia, przejazd na odcinku drogi (np. 20 m.), pomiar L za pomocą taśmy mierniczej, stanowisko rolkowe, czujnik optyczny typu DATRON CORREVIT® L-CE, czujnik GPS DATRON MicroSAT Czy prawidłowa jest odpowiedź: „Dowolne metody, które pozwalają uzyskać dokładność pomiaru drogi i prędkości wymagane w rozdziale III Aneksu I B, par. 2.1, 2.2.
, pomiar L za pomocą taśmy mierniczej, stanowisko rolkowe, czujnik optyczny typu DATRON CORREVIT® L-CE, czujnik GPS DATRON MicroSAT. Czy prawidłowa jest odpowiedź: „Dowolne metody, które pozwalają uzyskać dokładność pomiaru drogi i prędkości wymagane w rozdziale III Aneksu I B, par. 2.1, 2.2.")
21
Jakie są dopuszczalne metody sprawdzania błędu pomiaru drogi i prędkości?
Według wymagania 259 nieobciążony pojazd ogumiony zgodnie z warunkami producenta powinien się poruszać napędzany własnym silnikiem po płaskiej prostej drodze o długości co najmniej 1 km z prędkością 50±5 km/h. Praktyczna realizowalność tego wymagania nie wymaga komentarza

22
Jak należy rozumieć końcowe sformułowanie wymagania 259: „provided that it is of comparable accuracy, alternative methods, such as suitable test bench, may also be used for the test”? W Unii Europejskiej można spotkać dwie interpretacje tego zapisu: Tylko stanowisko rolkowe może zastąpić odcinek pomiarowy o długości 1000 m; Sprawdzanie może się odbywać także za pomocą innych procedur, w tym poprzez przejazd na krótszym niż 1000 m odcinku (nawet o długości 20 metrów)
")
23
Ad. 1. Podczas instalacji lub okresowej kontroli błąd pomiaru prędkości nie może przekroczyć ±1 km/h (w sumie z błędem systemowym: ±2 km/h), dokładność pomiaru błędu nie powinna być gorsza od ±0,2 km/h, tzn. przy prędkości 50 km/h – 0,4%. PYTANIE: Czy możliwa jest w rozsądnych kształtach produkcja stanowisk rolkowych o takiej dokładności odwzorowania prędkości każdego typu pojazdu, a jeżeli tak, to w jaki sposób takie stanowiska kalibrować?
, dokładność pomiaru błędu nie powinna być gorsza od ±0,2 km/h, tzn. przy prędkości 50 km/h – 0,4%. PYTANIE: Czy możliwa jest w rozsądnych kształtach produkcja stanowisk rolkowych o takiej dokładności odwzorowania prędkości każdego typu pojazdu, a jeżeli tak, to w jaki sposób takie stanowiska kalibrować")
24
Ad. 2 Jak można sobie wyobrazić ocenę dokładności pomiaru prędkości na odcinku pomiarowym o długości 20 lub 50 metrów?

25
Propozycja Instytutu Transportu Samochodowego wyposażenia stacji tachografowych
Stanowisko rolkowe Odcinek pomiarowy o długości 20 metrów Stanowisko rolkowe jest podstawowym wyposażeniem; służy zarówno do kalibracji, jak i sprawdzania tachografu; Odcinek pomiarowy służy do kalibracji pojazdów, które nie mogą wjechać na stanowisko rolkowe, lub w przypadku awarii stanowiska rolkowego UWAGA: Dla uzyskania obliczeń współczynnika W z dokładnością większą, niż 0,5% w niektórych przypadkach wymagany jest trzykrotny przejazd odcinka. Rozwiązanie racjonalne i identyczne, jak zaproponowane przez VOSA

26
Kalibracja i sprawdzanie tachografu cyfrowego -
system kalibracji rolkowej

27
Schemat poglądowy stanowiska rolkowego
Kalibrator

28
Kalibracja i sprawdzanie tachografu cyfrowego -
system drogowy

29
Zasada kalibracji na odcinku drogi
Łącze bezprzewodowe BlueTooth Czujnik kąta obrotu koła Kalibrator Czujnik przekroczenia bariery STOP pomiaru Czujnik przekroczenia bariery START pomiaru Znana długość drogi np.50 m Zakładana dokładność pomiaru kąta obrotu +/- 5O

30
Zasada kalibracji na odcinku drogi
Uzyskanie przez pojazd zadanej stałej prędkości, Przekroczenie bariery rozpoczynającej pomiar impulsów z czujnika, Wysłanie rozkazu rozpoczęcia pomiaru do czujnika kąta obrotu koła Przekroczenie bariery kończącej pomiar impulsów z czujnika Wysłanie rozkazu końca pomiaru do czujnika kąta obrotu koła Odczyt z układu akceleratora obwodu opony Zatrzymanie samochodu i kalibracja tachografu cyfrowego

31
Program do kalibracji

32
Prace rozwojowe i konstrukcyjne podjęte przez ITS
Opracowanie i konstrukcja najazdowego stanowiska rolkowego do kalibracji i sprawdzania tachografu cyfrowego Opracowanie metod kalibracji takich stanowisk Opracowanie nowych metod i środków technicznych do kalibracji i sprawdzania tachografu cyfrowego z wykorzystaniem korelacyjnych czujników optycznych typu DATRON, oraz systemu GPS

33
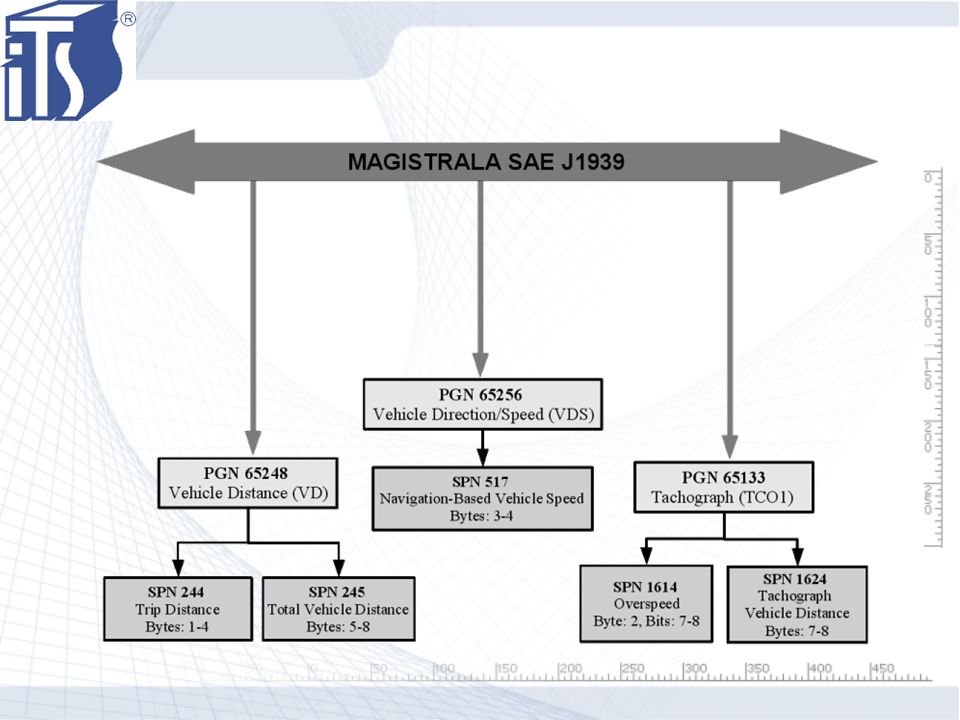
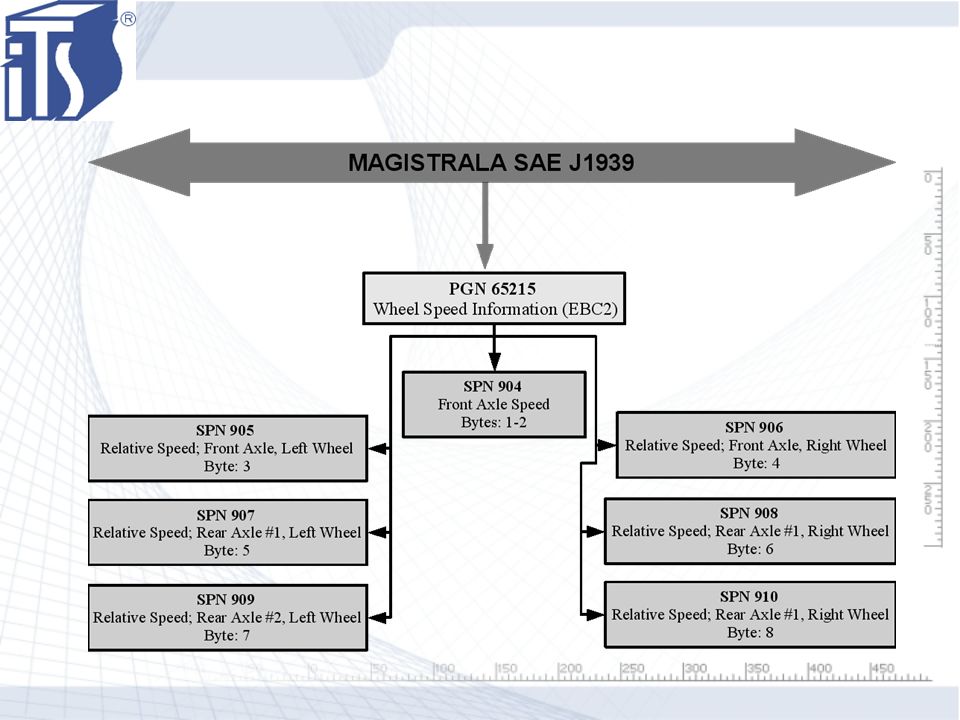
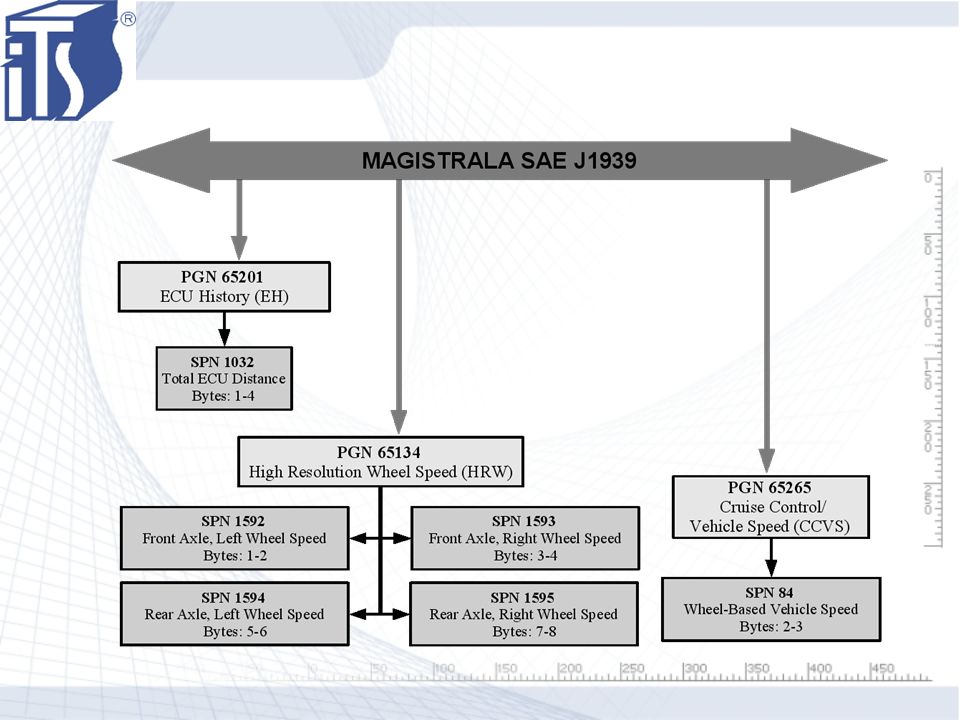
Prace rozwojowe i konstrukcyjne podjęte przez ITS
Integracja tachografów cyfrowych z siecią pokładową pojazdów wykorzystującą standard SAE J1939 dla celów zarządzania flotą. Opracowanie metod i środków technicznych dla oceny urządzeń pomiarowo – kontrolnych stanowiących wyposażenie stacji tachografowych

34
Poza referatem ???!

35
Italian Device Prędkość wskazywana przez tachograf cyfrowy jest modyfikowana przez kierowcę wartością współczynnika f

36
Zasada działania Italian Device
Czujnik tachografu jest wykręcany a w jego miejsce wkręcony jest fantom czujnika. Fantom generuje taką samą ilość impulsów co czujnik rzeczywisty. Częstotliwość z tego czujnika jest modyfikowana przez prosty układ mikroprocesorowy. Italian Device pobudza cewkę impulsatora sygnałem zmodyfikowanym o wartość współczynnika fałszującego f. W ten sposób kierowca może zmienić prędkość pojazdu o wartość współczynnika fałszującego, pozostawiając profil jazdy bez zmian

41
Dziękuje za uwagę

Podobne prezentacje