Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
ALGORYTMY STEROWANIA KILKOMA RUCHOMYMI WZBUDNIKAMI W NAGRZEWANIU INDUKCYJNYM OBRACAJĄCEGO SIĘ WALCA Piotr URBANEK, Andrzej FRĄCZYK, Jacek KUCHARSKI

2
Wzbudniki nieruchome. Nierównomierność rozkładu temperatury wzdłuż tworzącej walca.

3
Czy za pomocą metody nagrzewania indukcyjnego powierzchnię wirującego walca można zgodnie z wymogami technologicznymi nagrzać równomiernie?

4
Prądy wirowe generowane na powierzchni walca zostały zastąpione punktowymi źródłami ciepła o mocy czynnej obliczonej we wcześniejszych symulacjach komputerowych popartych badaniami empirycznymi Z uwagi na to, że w trakcie ciągłej pracy temperatura powierzchni walca wynosi od 70 do 300 C i jej wahania nie przekraczają kilkunastu stopni Celsjusza można założyć stałość elektrycznych i cieplnych parametrów materiałowych modelu, przyjmując wartości średnie dla rozważanego przedziału temperatur. Do badań przyjęto dwuwymiarowy cieplny model numeryczny, zakładając, że na skutek ruchu obrotowego walca moc generowana pod każdym z wzbudników zostaje rozmyta wzdłuż jego obwodu. Zatem najistotniejsze z punktu widzenia dynamiki cieplnej obiektu stają się wymiary wzdłuż tworzącej walca oraz wzdłuż grubości jego części roboczej (tzw. płaszcza). Do rozważań przyjęto model numeryczny obracającego się walca stalowego, w którym przyjęto następujące założenia upraszczające:
. Do rozważań przyjęto model numeryczny obracającego się walca stalowego, w którym przyjęto następujące założenia upraszczające:.")
5
Widok połowy modelu numerycznego z warunkami brzegowymi 3 rodzaju.

6
Definicja: Miarą równomierności temperatury powierzchni walca jest różnica pomiędzy największą i najmniejszą wartością temperatury wzdłuż tworzącej walca w stanie cieplnie quasi-ustalonym, czyli: gdzie: i – numer elementu na powierzchni walca wzdłuż osi x, k – czas próbkowania. Miara nierównomierności nagrzewania powierzchni walca. x y

7
Wariant 1. Obliczony rozkład mocy czynnej zasilającej walec zapewniający najkorzystniejszy rozkład temperatury na jego powierzchni.

8
Czy poruszając wzbudnikami wzdłuż tworzącej walca jesteśmy w stanie utrzymać podobną równomierność temperatury, jak dla obliczonego wcześniej rozkładu mocy idealnej?

9
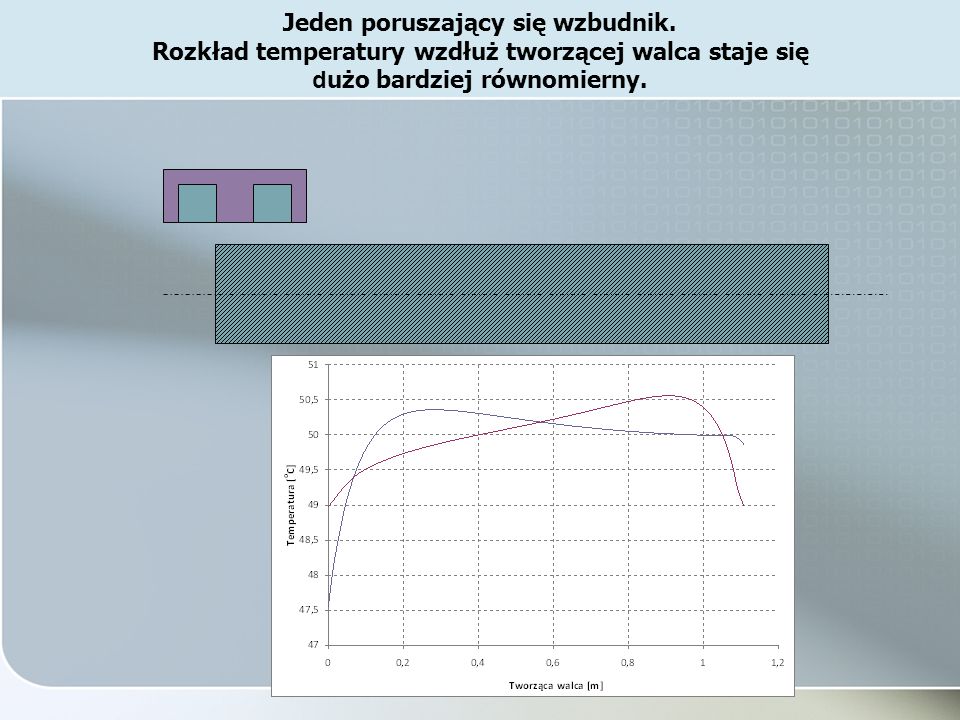
Jeden poruszający się wzbudnik. Rozkład temperatury wzdłuż tworzącej walca staje się d użo bardziej równomierny.

11
Zakładając maksymalną moc grzejną dostarczaną przez pojedynczy wzbudnik, ile wzbudników wymaganych jest do nagrzewania powierzchni walca aby osiągnąć wymagany poziom temperatury? Cel badań: możliwie najlepsza równomierność rozkładu temperatury na powierzchni walca. Jak i w jakim obszarze nad powierzchnią walca wzbudniki powinny poruszać się względem siebie? Jaka jest minimalna prędkość nad powierzchnią walca pojedynczego wzbudnika o mocy zależnej jedynie od wymagań technologicznych. Jaka będzie wyglądała zależność prędkości wzbudników od ich liczby?

12
Parametry nagrzewania ruchomymi wzbudnikami: prędkość liniowa wzbudników liczba wzbudników zakres poruszania się wzbudników oraz ich moc chwilowa na wybranymi obszarami Sposoby nagrzewania powierzchni walca za pomocą ruchomych wzbudników.

13
Wariant 2. Wartość współczynnika R w zależności od liczby wzbudników dysponujących nieograniczoną mocą oraz ich prędkości liniowej nad powierzchnią walca. Wnioski do projektowania rzeczywistego układu : Powyżej prędkości wzbudników wynoszącej 7cm/s wartość współczynnika R nie przekracza 2 C. Dla prędkości wzbudników poniżej 4cm/s istnieje duża zależność pomiędzy liczbą aktywnych źródeł grzejnych a wartością współczynnika nierównomierności rozkładu temperatury wzdłuż tworzącej walca.

14
Wartość współczynnika R w zależności od liczby wzbudników dysponujących ograniczoną mocą oraz ich prędkości liniowej nad powierzchnią walca. Wnioski do projektowania rzeczywistego układu : Wartość współczynnika R zależy głównie od liczby poruszających się źródeł ciepła. W badaniach ograniczono moc czynną źródeł ciepła do 1500 watów. Jest to wariant możliwy do praktycznej realizacji.

15
Wariant 3. Nagrzewanie walca wzbudnikami dysponującymi ograniczoną mocą czynną, poruszającymi się w obrębie stref, których długość określona została na podstawie zapotrzebowania na energię cieplną. Układ z trzema wzbudnikami. Układ z sześcioma wzbudnikami.

16
Zależność wartości współczynnika R od liczby wzbudników oraz ich prędkości nad powierzchnią walca. Wnioski do projektowania rzeczywistego układu : Poziom nierównomierności rozkładu temperatury wzdłuż tworzącej walca zależy głównie od liczby wzbudników. Istotny jest jednak fakt uzyskania dla 6 wzbudników nierównomierności na poziomie 5 C nawet dla niewielkich prędkości wzbudnika.

17
W artykule przedstawiono koncepcję uzyskania równomiernego rozkładu temperatury wzdłuż tworzącej walca za pomocą sekcji ruchomych wzbudników, Dla ruchomych wzbudników najlepsze efekty daje stosowanie źródeł grzejnych o dostatecznie dużej, potrzebnej do zredukowania wartości współczynnika R mocy grzejnej, W przypadku, gdy moc wzbudników jest ograniczona do wartości 1,5 kW (odpowiednik mocy wzbudników w układzie laboratoryjnym) zadawalające efekty można uzyskać jedynie dla 6 sekcji ruchomych wzbudników. Podsumowanie

Podobne prezentacje