Pobierz prezentację
1
Rozpoznawanie obrazów

2
Proces przetwarzania w systemie wizyjnym może być podzielony na trzy części:
Uzyskanie cyfrowej reprezentacji obrazu (recepcja, akwizycja); Przetworzenie obrazu cyfrowego z wykorzystaniem technik komputerowych; Analiza i przetworzenie rezultatów w celu sterowania robotami, kontroli automatycznych procesów, kontroli jakości, itp.
; Przetworzenie obrazu cyfrowego z wykorzystaniem technik komputerowych; Analiza i przetworzenie rezultatów w celu sterowania robotami, kontroli automatycznych procesów, kontroli jakości, itp.")
3
Główne funkcje systemu wizyjnego to:
Kontrola (określenie pozycji i ewentualne wygenerowanie komend do robota w celu wykonania pewnych czynności. Np. wybranie obszaru do malowania przez robota, kontrola elementów, itp. ); Badanie (określenie parametrów elementów, np. kształtu, jakości powierzchni, ilości otworów ); Wprowadzanie danych (informacje o jakości produktów, materiałów mogą być umieszczone w bazie danych. W tym czasie te dane mogą być sprawdzone w procesie inspekcji.).
; Badanie (określenie parametrów elementów, np. kształtu, jakości powierzchni, ilości otworów ); Wprowadzanie danych (informacje o jakości produktów, materiałów mogą być umieszczone w bazie danych. W tym czasie te dane mogą być sprawdzone w procesie inspekcji.).")
4
Zdolności adaptacyjne
Zestawienie obrazujące możliwości człowieka i cyfrowego systemu wizyjnego: Cecha Człowiek Komputer Zdolności adaptacyjne Duże zdolności adaptacyjne, związane zarówno z celem jak i typem wejścia. System sztywny w sensie postawionego celu rozpoznania oraz w sensie typu wejścia (wymaga obrazu dyskretnego - piksele). Sposób rozpoznawania Zdolności dokonywania względnie dokładnych oszacowań badanych obiektów, np. wykrywanie zepsutych owoców na podstawie koloru, tekstury (faktury), kształtu, zapachu. Zdolność dokonywania pomiarów przestrzennych na zdeterminowanym obrazie wejściowym, np.: długość i powierzchnia – zliczanie pikeseli. Kolor Subiektywna interpretacja. Pomiar parametrów R,G, B. Czułość Ograniczona zdolność identyfikacji poziomów szarości (~7 - 10). Zależna od rodzaju układu pozyskiwania obrazu.
. Sposób rozpoznawania. Zdolności dokonywania względnie dokładnych oszacowań badanych obiektów, np. wykrywanie zepsutych owoców na podstawie koloru, tekstury (faktury), kształtu, zapachu. Zdolność dokonywania pomiarów przestrzennych na zdeterminowanym obrazie wejściowym, np.: długość i powierzchnia – zliczanie pikeseli. Kolor. Subiektywna interpretacja. Pomiar parametrów R,G, B. Czułość. Ograniczona zdolność identyfikacji poziomów szarości (~7 - 10). Zależna od rodzaju układu pozyskiwania obrazu.")
5
Działanie w przestrzeni 2D i 3D
Cecha Człowiek Komputer Czas reakcji ~0,1 s Zależnie od realizacji sprzętowej i oprogramowania systemu komputerowego ~1/1000s lub mniejszy. Działanie w przestrzeni 2D i 3D Łatwa lokalizacja i rozpoznanie obiektów. Łatwiejsza lokalizacja i rozpoznanie obiektów w przestrzeni 2D niże 3D. Percepcja Percepcja jasności w skali logarytmicznej. Wpływ otaczającego obszaru (tła) na sposób percepcji Możliwość percepcji zarówno w skali liniowej jak i logarytmicznej. Zakres fal nm ~10nm – promieniowanie X do ~103 mm (podczerwień).
 na sposób percepcji. Możliwość percepcji zarówno w skali liniowej jak i logarytmicznej. Zakres fal nm. ~10nm – promieniowanie X do ~103 mm (podczerwień).")
6
Przykładowy schemat blokowy cyfrowego systemu wizyjnego:

7
Kryteria rozpoznawania i klasyfikacji obiektów cyfrowych
Współczynniki kształtu: współczynnik cyrkularności współczynnik Malinowskiej współczynnik Blaira-Blissa współczynnik Danielssona współczynnik Harlicka współczynnik Lp1 współczynnik Lp2 współczynnik Mz

8
gdzie: L – obwód rzutu obiektu S – pole rzutu obiektu di – odległość pikseli konturu obiektu od jego środka ciężkości i – numer piksela obiektu li – minimalna odległość piksela od konturu obiektu ri – odległość piksela obiektu od środka ciężkości obiektu n – liczba punktów konturu rmin – minimalna odległość konturu od środka ciężkości Rmax – maksymalna odległość konturu od środka ciężkości Lmax – maksymalny gabaryt obiektu.

9
Podstawowe parametry środek ciężkości: pole obiektu: obwód obiektu:
gdzie: S – pole obiektu L – obwód obiektu n x m – rozmiar obiektu – współrzędna x środka ciężkości – współrzędna y środka ciężkości. obwód obiektu:

10
Formuła Crofton’a: gdzie: N0, N90, N45, N135 – rzuty figury dla wybranych kierunków rzutowania, a – odległość punktów siatki. Przykładowe elementy strukturalne do wyznaczania długości rzutów figury: kąt otoczenie 0o 90o 45o 135o

11
Momenty geometryczne:
Dwuwymiarowy moment rzędu (p+q) dla funkcji f(x,y) : Moment centralny f(x,y): gdzie: Momenty centralne można przedstawić za pomocą momentów zwykłych:
 dla funkcji f(x,y) : Moment centralny f(x,y): gdzie: Momenty centralne można przedstawić za pomocą momentów zwykłych:")
12
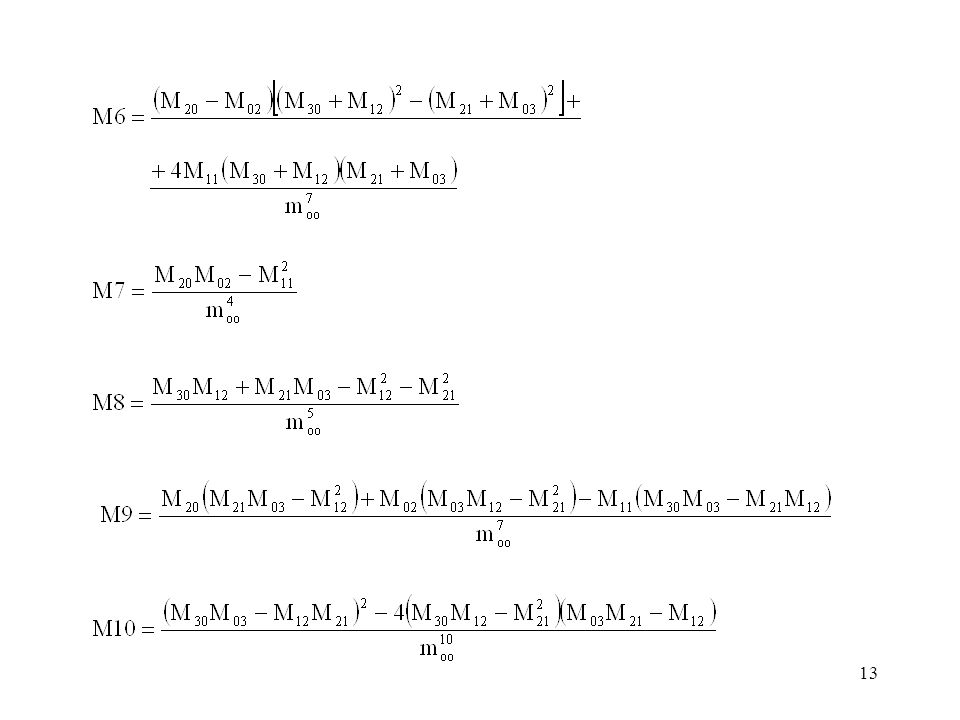
Z powyższych zależności możemy wyznaczyć niezmienniki momentowe:

14
Przykłady klas rozpoznawanych obiektów:

15
Metody minimalnoodległościowe
Dwuwymiarowa przestrzeń cech: Podejmowanie decyzji w metodzie NN:

16
Współczynnik W1

17
Moment M1

18
Moment M7





















 Metody odkłócania (Antyaliasing) zwiększenie rozdzielczości.>")