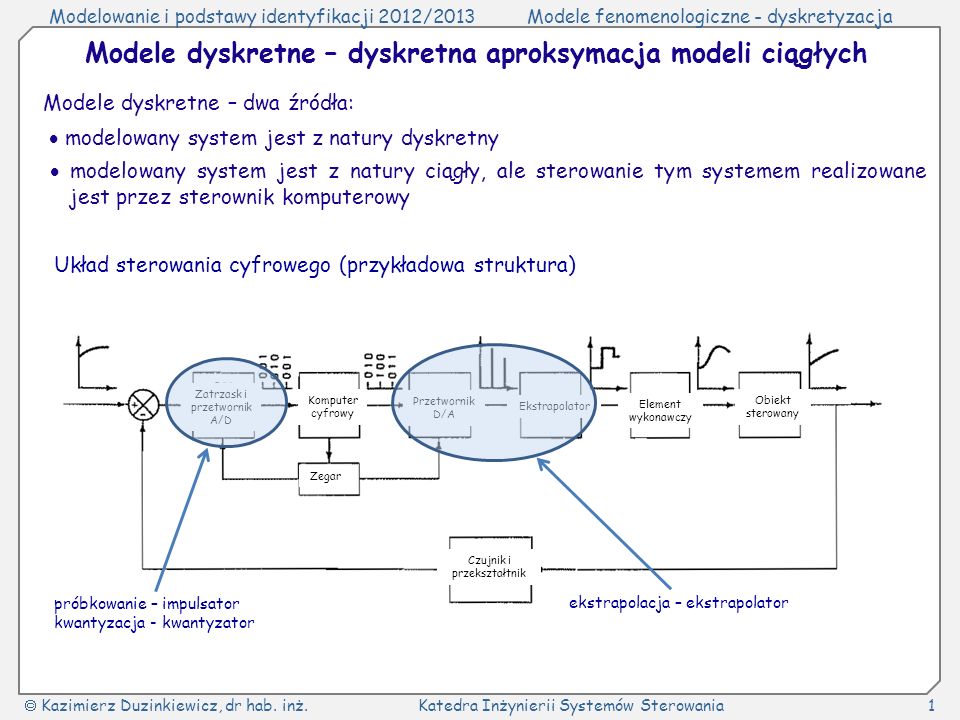
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania1 Modele dyskretne – dyskretna aproksymacja modeli ciągłych Modele dyskretne – dwa źródła: modelowany system jest z natury dyskretny modelowany system jest z natury ciągły, ale sterowanie tym systemem realizowane jest przez sterownik komputerowy Układ sterowania cyfrowego (przykładowa struktura) Zatrzask i przetwornik A/D Zegar Komputer cyfrowy Przetwornik D/A Ekstrapolator Element wykonawczy Obiekt sterowany Czujnik i przekształtnik próbkowanie – impulsator kwantyzacja - kwantyzator ekstrapolacja – ekstrapolator
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania2 Metody projektowania systemów sterowania: metody projektowania systemów sterowania ciągłego (analogowego) metody projektowania systemów sterowania dyskretnego (cyfrowego) Jeżeli chcemy zastosować w projektowaniu sterowania komputerowego obiektu ciągłego metody sterowania dyskretnego – potrzebna dyskretyzacja modelu obiektu ciągłego, a dokładnie dyskretna aproksymacja tego modelu Jeżeli chcemy zastosować w sterowaniu obiektu ciągłego sterownik dyskretny (cyfrowy) – projekt sterownika: zaprojektować sterownik ciągły dla ciągłego obiektu (modelu) i następnie dyskretyzować zaprojektowany sterownik dyskretyzować ciągły obiekt (model) i zaprojektować sterownik dyskretny dla dyskretnego obiektu Drugie podejście – bardziej popularne
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania3 Połączenie: system czasu ciągłego do systemu czasu dyskretnego Istota działania przetwornika analogowo – cyfrowego (A/C) Przetwornik A/C Sygnał czasu ciągłego Impulsator Sygnał czasu dyskretnego - sygnał próbkowany - sygnał próbkowany i kwantowany
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania4 Połączenie: system czasu dyskretnego do systemu czasu ciągłego Przetwornik C/A Ekstrapolator zerowego rzędu Sygnał czasu dyskretnego Sygnał czasu ciągłego (kwantowany) Istota działania przetwornika cyfrowo – analogowego (A/C)
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania5 I. Dyskretyzacja z rozwiązania/z całkowania (systemu ciągłego) Weźmy model stanu Rozwiązanie równania stanu Rozwiązanie: Składowa swobodna (odpowiedź zerowego wejścia) Składowa wymuszona (odpowiedź zerowego warunku początkowego)
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania6 Zdefiniujemy – eksponent macierzy kwadratowej Składowa swobodna – rozwiązanie równania jednorodnego Rozwiązanie równania jednorodnego ma postać (pokażemy na SD): Składowa wymuszona – rozwiązanie równania niejednorodnego - przy zerowym warunku początkowym Rozwiązanie równania niejednorodnego ma postać (pokażemy na SD):
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania7 Weźmy równanie wyjścia: Wyjście policzymy podstawiając uzyskany wynik rozwiązania równania stanu Podsumowanie:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania8 Dyskretyzacja z rozwiązania (bez utraty ogólności wyniku dla t 0 = 0) Odpowiedź stanu systemu ciągłego lub Dla dwóch kolejnych chwil próbkowania Przemnażając przez wyrażenie na
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania9 Odejmując wynik od wyrażenia na :
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania10 Przyjmując, że u(t) jest stałe pomiędzy chwilami próbkowania Zmieniając zmienną całkowania Stałe (wartość, dla danego systemu, różna dla różnych T s ) Definiujemy macierze
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania11 Możemy napisać równanie stanu lub w postaci uproszczonej Równanie wyjścia, jako równanie algebraiczne nie zmienia się ; zatem równanie wyjścia przy czym
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania12 Podsumowanie Mając model systemu ciągłego: Model systemu równoważnego dyskretnego: przy czym:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania13 II sposób – aproksymacja pochodnych w równaniu różniczkowym ilorazami różnicowymi Aproksymacja prawostronna: Weźmy ponownie model stanu przy czym
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania14 Stąd dla równania stanu Stałe (wartość, dla danego systemu, różna dla różnych T s ) Definiujemy macierze
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania15 Możemy napisać równanie stanu lub w postaci uproszczonej Równanie wyjścia, jako równanie algebraiczne nie zmienia się ; zatem równanie wyjścia przy czym
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania16 Podsumowanie Mając model systemu ciągłego: Model systemu równoważnego dyskretnego: przy czym:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania17 Weźmy model wejście wyjście
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania18 II sposób – aproksymacja pochodnych w równaniu różniczkowym ilorazami różnicowymi Aproksymacja lewostronna: Stosowane podejścia do aproksymacji
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania19
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania20 Aproksymacja prawostronna: Aproksymacja symetryczna:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania21 Przykład 6 Dyskretyzacja modelu z przykładu 2 m1m1 m2m2 k1k1 k 12 B 12 B1B1 B2B2 x1x1 x2x2 f(t) Model wejście - wyjście Warunki początkowe:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania22 Równania stanu Warunki początkowe:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania23 Model wejście - wyjście Aproksymacja ilorazem lewostronnym I równanie:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania24 II równanie:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania25 Warunki początkowe:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania26 Po uporządkowaniu: I równanie: II równanie: podobnie …… Warunki początkowe: II równanie: podobnie ……
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania27 Model stanu Aproksymacja modelem różnicowym Zastosowanie aproksymacji prawostronnej I równanie stanu: Po uporządkowaniu:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania28 II równanie stanu: Po uporządkowaniu: III równanie stanu: Po uporządkowaniu:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania29 IV równanie stanu: Po uporządkowaniu:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania30 Równanie wyjścia: Aproksymacja:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania31 Możemy też zapisać
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania32 Oznaczając: Możemy zapisać
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania33 Systemy liniowe stacjonarne – modele różniczkowe i różnicowe (jednowymiarowe) Modele wejście - wyjście: system ciągły – równania różniczkowe zwyczajne liniowe o stałych współczynnikach n- tego rzędu system dyskretny – równania różnicowe n-tego rzędu liniowe o stałych współczynnikach System ciągły; model wejście - wyjście: System dyskretny; model wejście - wyjście:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania34 Modele stanu: system ciągły – n równań różniczkowych zwyczajnych liniowych o stałych współczynnikach 1 -ego rzędu – równanie stanu, i q równań algebraicznych – równanie wyjścia system dyskretny – n równań różnicowych 1-ego rzędu liniowych o stałych współczynnikach - równanie stanu, i q równań algebraicznych – równanie wyjścia System ciągły; model stanu System dyskretny; model stanu:
Modelowanie i podstawy identyfikacji 2012/2013Modele fenomenologiczne - dyskretyzacja Kazimierz Duzinkiewicz, dr hab. inż.Katedra Inżynierii Systemów Sterowania35 Dziękuję – koniec materiału prezentowanego podczas wykładu