Stabilność i jakość regulacji Automatyka Wykład 7 i 8 Stabilność i jakość regulacji
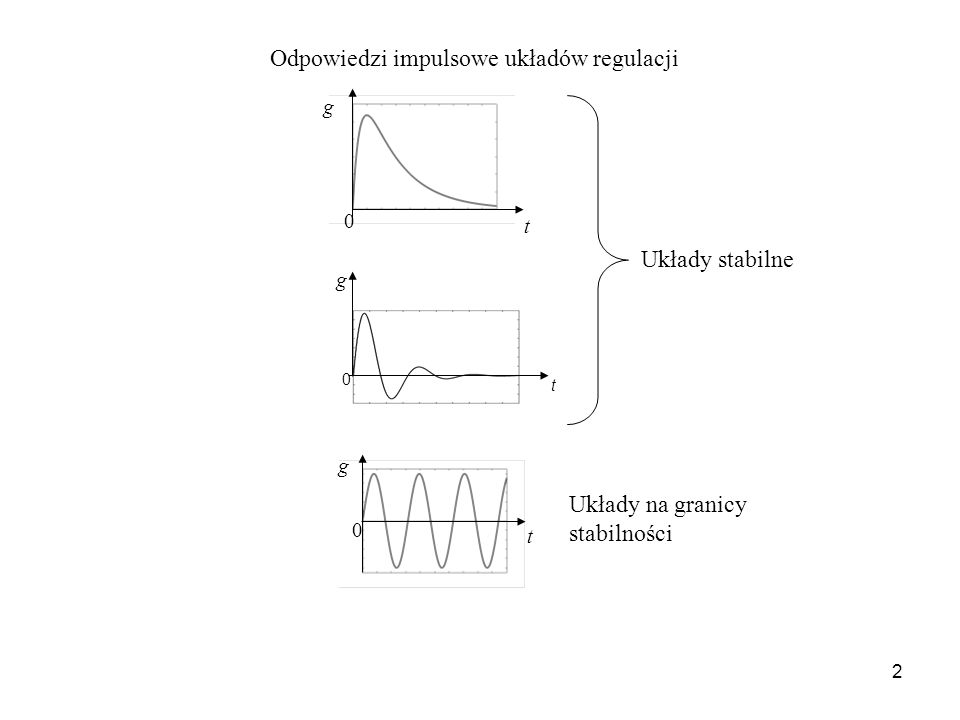
Odpowiedzi impulsowe układów regulacji t Układy stabilne g t g t Układy na granicy stabilności
Odpowiedzi skokowe układów regulacji h t 1 h 1 t h Układy stabilne 1 t h Układy na granicy stabilności 1 t
Transmitancja operatorowa układu regulacji Gr(s) Gob(s) w(t) u(t) e(t) _ + Gsp(s) y(t) y1(t)
(7) (8) (9) (10) (11) (12) Warunek stabilności: (13)
Wskaźniki jakości regulacji Dokładność statyczna Wskaźniki jakości związane z odpowiedzią skokową czas regulacji tr czas narastania tp maksymalne odchylenie dynamiczne h1 przeregulowanie Wskaźniki jakości związane z charakterystyką częstotliwościową pasmo przenoszenia zapas modułu zapas fazy Wskaźniki całkowe zapas stabilności
Przebieg oscylacyjny odpowiedzi skokowej h1 h w0=hust t + – tp tr 0 < < 1
Zapas stabilności (zapas modułu i zapas fazy) układu zamkniętego – wyznaczany na podstawie charakterystyki częstotliwościowej układu otwartego.
Lm = Lm0(-) = + 0(g) G0(j-π) 1 Im[G0] -π (–1, j0) a) -π (–1, j0) 0 Re[G0] 1 g b) Lm0() [dB] g Lm Lm = Lm0(-) = + 0(g) 0() [ o]
Schemat blokowy układu ze sprzężeniem zwrotnym _ + W(s) Y(s) ksp układ bez sprzężenia zwrotnego układ ze sprzężeniem zwrotnym [dB] Logarytmiczne charakterystyki amplitudowe układu zamkniętego i układu bez sprzężenia zwrotnego Schemat blokowy układu ze sprzężeniem zwrotnym
dla aperiodycznego przebiegu uchybu dla periodycznego przebiegu uchybu a) b) e(t) e2(t) t
Ćwiczenie. Przeanalizować uchyb ustalony w układzie regulacji po skokowej zmianie wartości zadanej. Schemat blokowy układu regulacji przedstawiono na rysunku. _ + W(s) Y(s) ksp E(s)