Pobierz prezentację
1
Strukturalno – funkcjonalna charakterystyka kończyny górnej z obręczą barkową

2
Definicje Człon – sztywny element ciała w postaci kości Stopień swobody – niezależny względny ruch członu w stawie, inaczej liczba płaszczyzn w których możliwy jest do wykonania ruch w danym połączeniu Para biokinematyczna – ruchome połączenie dwóch członów. Aby dwa człony można było nazwać para biokinematyczną, muszą być spełnione 2 warunki: 1 – punkt wspólny między członami 2 – ruchomość w zakresie 2-3 mm przesunięcia liniowego lub 5 stopni kątowych Łańcuch biokinematyczny – spójny układ członów połączonych ruchomo (otwarty, zamknięty)
")
3
Definicje (cd.) Biomechanizm – łańcuch biokinematyczny zdolny do przekazywania ruchu kinematycznie określonego. Innymi słowy będzie to taki łańcuch , w którym przy jednym członie nieruchomym (tzw. podstawie) pozostałe człony będą wykonywały ruchy określone. Ruchliwość – liczba stopni swobody członów ruchomych biomechanizmów względem podstawy Klasa pary biokinematycznej - określa liczbę nałożonych więzów (ograniczeń) na dane połączenie, inaczej jest to liczba odjętych stopni swobody (danego połączenia) od liczby 6 ( 6 = liczbie stopni swobody ciała całkowicie swobodnego).
 pozostałe człony będą wykonywały ruchy określone. Ruchliwość – liczba stopni swobody członów ruchomych biomechanizmów względem podstawy. Klasa pary biokinematycznej - określa liczbę nałożonych więzów (ograniczeń) na dane połączenie, inaczej jest to liczba odjętych stopni swobody (danego połączenia) od liczby 6 ( 6 = liczbie stopni swobody ciała całkowicie swobodnego).")
4
Rodzaje połączeń stawowych (ruchomych)
kulisty,wolny b) owalny c) kłykciowy d) zawiasowy e) zawiasowy ścisły
 owalny. c) kłykciowy. d) zawiasowy. e) zawiasowy. ścisły.")
5
Stosowane symbole połączeń stawowych o określonej liczbie stopni swobody (klasie pary biokinematycznej). Stopnie swobody połączenia Klasa pary biokinematycznej III IV V

6
A - Schemat strukturalny szkieletu człowieka
B - szkielet człowieka (anatomiczny)
")
7
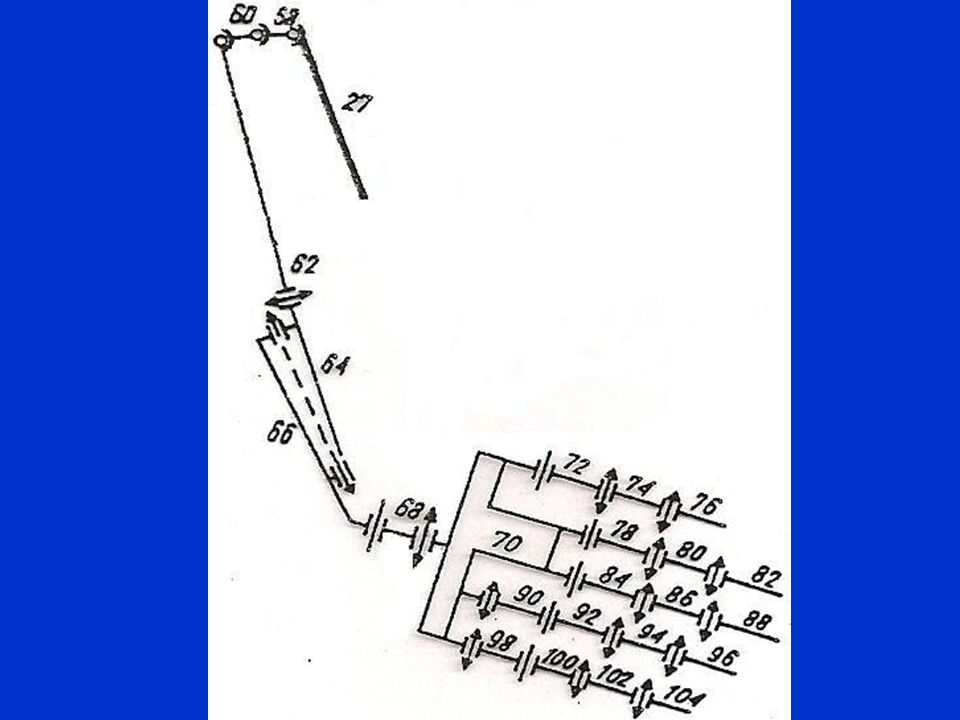
Schemat strukturalny kończyny górnej i obręczy barkowej

9
Identyfikacja poszczególnych członów

10
68 – szereg bliższy kości nadgarstka (licząc od kości promieniowej; łódeczkowata, księżycowata, trójgraniasta, grochowata) 70 – szereg dalszy kości nadgarstka (licząc od kości promieniowej: czworoboczna większa, czworoboczna mniejsza, główkowata, haczykowata) + II i III kość śródręcza 72, 90, 98 – kości śródręcza I, IV i V palca 74,78, 84, 92, 100 – paliczki bliższe palców I, II, III, IV i V 80, 86, 94, 102 – paliczki środkowe palców II, III, IV, V 76, 82, 88, 96, 104 – paliczki dalsze palców I, II, III, IV, V 27 – mostek 58 – obojczyk 60 – łopatka 62 – k. ramienna 64 – k. łokciowa 66 – k. promieniowa
 + II i III kość śródręcza. 72, 90, 98 – kości śródręcza I, IV i V palca. 74,78, 84, 92, 100 – paliczki bliższe palców I, II, III, IV i V. 80, 86, 94, 102 – paliczki środkowe palców II, III, IV, V. 76, 82, 88, 96, 104 – paliczki dalsze palców I, II, III, IV, V. 27 – mostek. 58 – obojczyk. 60 – łopatka. 62 – k. ramienna. 64 – k. łokciowa. 66 – k. promieniowa.")
11
Identyfikacja połączeń stawowych i wyliczanie ruchliwości biomechanizmów

12
W = 3 x n3 +2 x n2 +1 x n1 W – ruchliwość łańcucha względem podstawy którą przyjmujemy za nieruchomą n1, n2, n3 – liczba połączeń o określonej liczbie stopni swobody

13
Ruchliwość kończyny górnej biorąc za podstawę mostek
= 3 x 3 9 2 x 6 = 12 = 1 x 15 15 Σ = 36

14
Ruchliwość dłoni przyjmując kość promieniową jako podstawę
= 3 x 2 x 6 = 12 = 1 x 13 13 Σ = 25

15
Szkielety kończyn przednich różnych kręgowców

16
Schematy kończyn przednich różnych kręgowców:
Wpływ własności środowiska w którym przebywają kręgowce oraz funkcje, które wykonuje kończyna przednia (górna) determinują jej kształt i budowę. Schematy kończyn przednich różnych kręgowców: a – salamandry b – żółwia morskiego c - krokodyla d – ptaka e – nietoperza f – wieloryba g – kreta h - człowieka d) a) b) c) e) f) g) h)
 determinują jej kształt i budowę. Schematy kończyn przednich różnych kręgowców: a – salamandry. b – żółwia morskiego. c - krokodyla. d – ptaka. e – nietoperza. f – wieloryba. g – kreta. h - człowieka. d) a) b) c) e) f) g) h)")
17
Funkcje rozwijane przez kończynę górną człowieka

18
Funkcje: Chwytna; Manipulacyjna ; Transportowa; Komunikacyjna;
Motoryczność sportowa: - podporowa (elementy gimnastyczne, wspierania, podpory itp.); - przekazywanie pędu (rzut oszczepem, pchnięcie kulą, uderzenie piłki itp.) - wyrazowa (gimnastyka artystyczna, balet, taniec, łyżwiarstwo figurowe itp.); - amortyzacyjna, ochronna (sporty walki); W patologiach: f. podporowa
; - przekazywanie pędu (rzut oszczepem, pchnięcie kulą, uderzenie piłki itp.) - wyrazowa (gimnastyka artystyczna, balet, taniec, łyżwiarstwo figurowe itp.); - amortyzacyjna, ochronna (sporty walki); W patologiach: f. podporowa.")
19
Funkcja chwytna i manipulacyjna

20
Zasięgi ruchów kończyn górnych człowieka

21
Zasadnicze wymiary ciała człowieka

22
Ważniejsze aktywne i pasywne pozycje człowieka podczas pracy
b) a) stojąca, b) w skłonie
 a) stojąca, b) w skłonie.")
23
c) d) c) przysiad, d) leżąca
Ważniejsze aktywne i pasywne pozycje człowieka podczas pracy (cd.) c) d) c) przysiad, d) leżąca
 c) d) c) przysiad, d) leżąca.")
24
e) siedząca płaska, f) siedząca
Ważniejsze aktywne i pasywne pozycje człowieka podczas pracy (cd.) e) f) e) siedząca płaska, f) siedząca
 e) f) e) siedząca płaska, f) siedząca.")
25
Zakres ruchów kończyny górnej - przykład

26
Maksymalne powierzchne użytkowe ręki w płaszczyźnie poprzecznej (widok z góry)
S – środek ciężkości głowy i obrys szyi, 0 – oś obrotu w stawie ramiennym, B – środek stawu łokciowego, C – środek stawu promieniowo – nadgarstkowego, D – koniec palców, α – zakres ruchu w stawie promieniowo – nadgarstkowym, α1 – odwodzenie (20°), α2 – przywodzenie (40°), α3 – zginanie (80°), β1 – zakres zgnania w stawie łokciowym (140°), β2 – zmniejszony kąt zginania 110° (obecność szyi), γ – zakres ruchu w stawie ramiennym (150°), δ – zakres zginania palców w stawach śródręczno – palcowych (80°)
, α2 – przywodzenie (40°), α3 – zginanie (80°), β1 – zakres zgnania w stawie. łokciowym (140°), β2 – zmniejszony kąt zginania 110° (obecność szyi), γ – zakres ruchu w stawie ramiennym (150°), δ – zakres zginania palców w stawach śródręczno – palcowych (80°)")
27
Maksymalna powierzchnia osiągalna przez rękę w płaszczyźnie czołowej (widok z przodu)
S – środek ciężkości głowy, O, O` - os stawu ramiennego, AC = BC – długość ręki, OB. = O`N – długość kończyny wolnej, OG – długość ramienia, BG = HJ = HK = GL – długość przedramienia z ręką, OH +OG cos φ (φ = 30°), HD = BG cos φ, ED = EF = AC cosφ, α1 – zakres odwodzenia ręki (20°), α2 –zakres przywodzenia ręki (40°), β – zakres zginania w stawie łokciowym (140°),γ – zakres odwodzenia (80°) i γ` - przywodzenia w stawie ramiennym (30°)
, HD = BG cos φ, ED = EF = AC cosφ, α1 – zakres odwodzenia ręki (20°), α2 –zakres przywodzenia ręki (40°), β – zakres zginania w stawie łokciowym (140°),γ – zakres odwodzenia (80°) i γ` - przywodzenia w stawie ramiennym (30°)")
28
Maksymalne powierzchnie osiągane przez rękę w płaszczyźnie strzałkowej (widok z boku)
S – środek ciężkości głowy, O - oś obrotu w stawie ramiennym, O`, O`` - osie obrotu O przesunięte z powodu ruchomości obręczy barkowej, A – staw łokciowy, OK – długość kończyny górnej wolnej, OK` - długość kończyny górnej, α – zakres ruchu w stawie ramiennym (140°), β – zakres w stawie łokciowym (140°), γ – kąt zginania w stawie promieniowo – nadgarstkowym (85°), γ`kąt prostowania w tych stawach (85°), δ – kąt obrotu obręczy barkowej
, β – zakres w stawie łokciowym (140°), γ – kąt zginania w stawie promieniowo – nadgarstkowym (85°), γ`kąt prostowania w tych stawach (85°), δ – kąt obrotu obręczy barkowej.")
29
Zakres ruchów dłoni - przykład

30
Maksymalne powierzchnie użytkowe osiągane przez palce w płaszczyźnie strzałkowej (widok z boku)
O – oś obrotu (środek głowy kości główkowatej), P – oś obrotu stawu nadgarstkowo – śródręcznego kciuka, OB = OD = OE – długość ręki, OA = OC – długość kciuka, NR – długość nadgarstka, RD – długość III-go palca, α – zakres ruchu w stawach promieniowo – nadgarstkowym i międzynadgarstkowym (170°), β – kąt zginania w stawie śródręczno – palcowym III (80°), γ – kąt zginania w stawie międzypaliczkowym bliższym III – go palca (115°), oraz δ – dalszym tego palca (80°), φ – zakres ruchu przywodzenia i odwodzenia kciuka (50°)
, P – oś obrotu stawu. nadgarstkowo – śródręcznego kciuka, OB = OD = OE – długość ręki, OA = OC – długość kciuka, NR – długość nadgarstka, RD – długość III-go palca, α – zakres ruchu w stawach promieniowo – nadgarstkowym i międzynadgarstkowym (170°), β – kąt zginania w stawie śródręczno – palcowym III (80°), γ – kąt zginania w stawie międzypaliczkowym bliższym III – go palca (115°), oraz δ – dalszym tego palca (80°), φ – zakres ruchu przywodzenia i odwodzenia kciuka (50°)")
31
Maksymalne powierzchnie użykowe palców w płaszczyźnie poprzecznej
O – oś obrotu ręki w stawie promieniowo – nadgarstkowym, O1 - oś obrotu kciuka w stawie nadgarstkowo – śródręcznym, O2, O3, O4, O5 – osie obrotu palców w stawach śródręczno – palcowych, O1A – długość kciuka, D, E, F, G – końce palcó od II do V, O1 B – długość śródręcza kciuka, BC – bliższy i CJ – dalszy paliczek kciuka, α – zakres zginania i prostowania śródręcza kciuka, zakres przywodzenia i odwodzenia palców: β – II (60°),γ – III (40°), δ –IV (40°), φ – V (50°), zakres zginania w stawie śródręcno – palcowym kciuka, ψ – (75°) i międzypaliczkowym θ (80°)
,γ – III (40°), δ –IV (40°), φ – V (50°), zakres zginania w stawie śródręcno – palcowym kciuka, ψ – (75°) i międzypaliczkowym θ (80°)")
32
Maksymalne zasięgi prawej ręki w przekrojach pionowych poprowadzonych pod różnymi kątami względem płaszczyzny symetrii osoby badanej: H0 – wysokość względem punktu odniesienia; L0 – odległość od osi pionowej przechodzącej przez punkt odniesienia; 0 – punkt odniesienia

33
Maksymalne zasięgi prawej ręki w przekrojach poziomy poprowadzonych na różnych wysokościach względem punktu odniesienia: Lp0 – zasięg w przód od punktu odniesienia; L – zasięg w bok od punktu odniesienia; 0 – punkt odniesienia; α – łuk o promieniu 75°

34
Normalne i maksymalne strefy pracy
Strefę normalną wyznacza zasięg przedramienia. Dla czynności precyzyjnych przewidziana jest strefa, powstała z nałożenia się stref obu rąk ( obszar zakropkowany). Strefa zakreskowana, wynikająca z nałożenia się zasięgów maksymalnych, jest przeznaczona do prac dwuręcznych, nie wymagających dużej precyzji. a a - w kierunku poziomym
. Strefa zakreskowana, wynikająca z nałożenia się zasięgów maksymalnych, jest przeznaczona do prac dwuręcznych, nie wymagających dużej precyzji. a. a - w kierunku poziomym.")
35
Normalne i maksymalne strefy pracy (cd.)
b b - w kierunku pionowym równoległym i prostopadłym do osi wzroku 1–15 - wymiary

36
Optymalny obszar pracy rąk w pozycji siedzącej; skala podaje przybliżoną maksymalna siłę uciągu ramienia w zależności od położenia uchwytu w polu pracy. Wierzchołki czworoboku (pracy optymalnej wyznaczane są w sposób następujący : A – jako położenie środka dłoni zwiniętej w pięść, przy opuszczonym ramieniu i kącie łokciowym 90°; B – jak A przy kącie łokciowym 75 °; C - jako położenie środka dłoni zwiniętej w pięść, ręki wyprostowanej poziomo w przód na wysokości barku; D – jako punkt przecięcia prostej poziomej przechodzącej przez wierzchołek A i łuku zatoczonego przez środek pięści wyprostowanej ręki przy ruchu w dół z wierzchołka C.

37
Liczenie ruchliwości innych łańcuchów biokinematycznych (kończyny dolnej, kręgosłupa wraz z klatką piersiową, całej biomaszyny)
")
















 materiałem źródłowym jest mapa sytuacyjno-wysokościowa.>")



