Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Wykład no 6 sprawdziany:

2
Zadanie 1 Obliczyć współczynniki cn zespolonego szeregu Fouriera dla funkcji okresowej: u(t) Um t T/2 T dla n≠0

3
dla n≠0 mamy więc: Dla n=0 mamy: Zadanie 2: Obliczyć i narysować ampltudową charakterystykę widmową sygnału:

4
czyli:

6
Własność tę nazywamy twierdzeniem o modulacji.
Zadanie 3: Znamy transformatę funkcji u(t)↔U(ω). Podać transormatę funkcji , gdzie ω0 jest liczbą rzeczywistą. Podstawiając -0=x mamy: ostatecznie: Własność tę nazywamy twierdzeniem o modulacji. Zadanie 4: Transformata funkcji u(t) jest U(ω). Czemu jest równa transformata ?
↔U(ω). Podać. transormatę funkcji , gdzie ω0 jest liczbą rzeczywistą. Podstawiając -0=x. mamy: ostatecznie: Własność tę nazywamy twierdzeniem o modulacji. Zadanie 4: Transformata funkcji u(t) jest U(ω). Czemu jest. równa transformata")
7
Warunek Nyquista fp>2fmax, to można odtworzyć
ostatecznie: Zadanie 5: Podać warunek Nyquista dla częstotliwości próbkowania. Warunek Nyquista fp>2fmax, to można odtworzyć próbkowany sygnał, gdzie fp częstotliwość sygnału próbkującego, fmax – maksymalna częstotliwość widma sygnału próbkowanego.

8
System nazywamy liniowym, jeżeli spełnia zasadę
Zadanie 6: Jakie warunki musi spełniać system liniowy? System nazywamy liniowym, jeżeli spełnia zasadę superpozycji, tzn. jeżeli dla wymuszenia x1(t) odpowiedzią jest y1(t), a dla wymuszenia x2(t) odpowiedzią jest y2(t), to mówimy, że spełniona jest zasada superpozycji jeżeli dla wymuszenia α1x1(t)+α2x2(t) odpowiedzią jest α1y1(t)+α2y2(t). Zadanie 7: Podać definicję systemu stacjonarnego. System jest stacjonarny, jeżeli kształt jego odpowiedzi impulsowej nie zależy od chwili przyłożenia impulsu δ(t) na jego wejście.
 odpowiedzią jest y1(t), a dla wymuszenia x2(t) odpowiedzią jest y2(t), to mówimy, że spełniona. jest zasada superpozycji jeżeli dla wymuszenia. α1x1(t)+α2x2(t) odpowiedzią jest α1y1(t)+α2y2(t). Zadanie 7: Podać definicję systemu stacjonarnego. System jest stacjonarny, jeżeli kształt jego odpowiedzi. impulsowej nie zależy od chwili przyłożenia impulsu δ(t) na jego wejście.")
9
Pamiętając, że h(t)=0 dla t<0 i x(t)=0 dla t<0 możemy
Zadanie 8: Podać definicję transmitancji częstotliwościowej układu. Pamiętając, że h(t)=0 dla t<0 i x(t)=0 dla t<0 możemy całkę spoltową zapisać w postaci: i stosując transformatę Fouriera mamy: Y()=H()X() H() nazywamy transmitancją częstotliwościową lub charakterystyką częstotliwościową systemu.
=0 dla t<0 i x(t)=0 dla t<0 możemy. całkę spoltową zapisać w postaci: i stosując transformatę Fouriera. mamy: Y()=H()X() H() nazywamy transmitancją częstotliwościową lub. charakterystyką częstotliwościową systemu.")
10
System nazywamy stabilnym, jeżeli sygnał wyjściowy
Zadanie 9: Podać warunek konieczny i dostateczny stabilności układu. System nazywamy stabilnym, jeżeli sygnał wyjściowy jest ograniczony dla wszystkich ograniczonych sygnałów wejściowych. Jest to tzw. kryterium stabilności wejście - wyjście Warunkiem koniecznym i dostatecznym aby system był stabilny jest: Niech sygnał wejściowy x(t) będzie ograniczony, czyli |x(t)|≤M gdzie M – dodatnia liczba rzeczywista.
 będzie ograniczony, czyli. |x(t)|≤M. gdzie M – dodatnia liczba rzeczywista.")
11
a więc aby odpowiedź y(t) była ograniczona musi zachodzić:
wtedy z wynika a więc aby odpowiedź y(t) była ograniczona musi zachodzić: Zadanie 10: Czy znając odpowiedź układu na impuls Diraca można znaleźć odpowiedź tego układu na wymuszenie x(t)? Dla systemu stacjonarnego możemy przyjąć, że impuls δ(t) jest przyłożony na wejście w chwili t=0.
 była ograniczona musi. zachodzić: Zadanie 10: Czy znając odpowiedź układu na impuls Diraca można. znaleźć odpowiedź tego układu na wymuszenie x(t) Dla systemu stacjonarnego możemy przyjąć, że. impuls δ(t) jest przyłożony na wejście w chwili t=0.")
12
Niech h(t) będzie odpowiedzią układu na impuls δ(t)
Określić odpowiedź układu na wymuszenie x(t). Oznaczymy odpowiedź układu przez y(t). x(t) y(t)
. Oznaczymy odpowiedź układu przez y(t). x(t) y(t)")
13
x(t) x(τk) t τk τ Traktując x(τ)τ jako impuls jednostkowy δ(t) z wagą x(τ)τ otrzymujemy odpowiedź układ liniowego w postaci: h(t-τk) x(τk)τ, a sumując po wszystkich k mamy:
 x(τk)τ, a sumując po wszystkich k. mamy:")
14
W granicy otrzymujemy:
Odpowiedź y(t) układu liniowego stacjonarnego, którego odpowiedź na impuls δ(t) jest h(t) na dowolne wymuszenie x(t) wyraża się całką splotową.
 układu liniowego stacjonarnego, którego. odpowiedź na impuls δ(t) jest h(t) na dowolne wymuszenie. x(t) wyraża się całką splotową.")
15
Zadaniem systemu telekomunikacyjnego jest przesłanie
Modulacja ciągła Zadaniem systemu telekomunikacyjnego jest przesłanie sygnału informacyjnego Sygnał informacyjny jest nazywany sygnałem w pasmie podstawowym Pasmo podstawowe określa zakres częstotliwości w jakim leży sygnał dostarczony przez źródło informacji Dla prawidłowego wykorzystania kanału informacyjnego koniecznym jest przesunięci pasma podstawowego w inny zakres częstotliwości dogodny do transmisji sygnału

16
Przesunięcie zakresu częstotliwości sygnału jest
realizowane za pomocą modulacji Modulacją nazywamy proces, w którym pewien parametr fali nośnej jest zmieniany zgodnie z sygnałem informacyjnym (falą modulującą) Najczęściej jako falę nośną stosuje się przebieg sinusoidalny i w tym przypadku modulację nazywamy modulacją ciągłą W zależności od zmienianego parametru fali nośnej Asin mówimy o:
 Najczęściej jako falę nośną stosuje się przebieg. sinusoidalny i w tym przypadku modulację nazywamy. modulacją ciągłą. W zależności od zmienianego parametru fali nośnej. Asin mówimy o:")
17
zmianie ulega amplituda A i mówimy o modulacji amplitudy,
Asin zmianie ulega amplituda A i mówimy o modulacji amplitudy, 2. zmianie ulega kąt i mówimy o modulacji kąta. Dla fali sinusoidalnej mamy: =2πft+α możemy zmieniać albo częstotliwość f –modulacja częstotliwości albo zmieniać kąt fazowy α – modulacja fazy.

18
Modulacja amplitudy Fala nośna – c(t)=Accos(2πfct) Ac – amplituda fali nośnej fc - częstotliwość fali nośnej Sygnał modulujący – m(t) Źródła sygnałów c(t) i m(t) są fizycznie niezależne Fala zmodulowana amplitudowo ma postać: ka – jest nazywane czułością amplitudową modulatora
 Źródła sygnałów c(t) i m(t) są fizycznie niezależne. Fala zmodulowana amplitudowo ma postać: ka – jest nazywane czułością amplitudową modulatora.")
20
Modulacja przy warunku |kam(t)|<1 dla wszystkich t
|<1 dla wszystkich t")
21
zmiana fazy |kam(t)|>1 fala nośna przemodulowana
|>1 fala nośna przemodulowana")
22
Niech W – oznacza największą częstotliwość sygnału modulującego m(t).
W jest nazywane szerokością pasma sygnału informacyjnego Koniecznym jest spełnienie warunku: fc>>W Transformata Fouriera fali zmodulowanej amplitudowo ma postać:

23
gdzie M(f)↔m(t) M(f) -W W f 0.5Acδ(f+fc) 0.5Acδ(f-fc) -fc-W -fc -fc+W
górna wstęga boczna dolna wstęga boczna dolna wstęga boczna górna wstęga boczna -fc-W -fc -fc+W fc-W fc fc+W

24
w kierunku przewodzenia Rd i dobieramy R1>>Rd
Szerokość pasma transmisji BT=2W Przykład modulatora Modulator przełączajacy Przyjmujemy diodę idealną o rezystancji w kierunku przewodzenia Rd i dobieramy R1>>Rd wtedy: c(t)=Accos(2πfct) u1(t) R1 m(t) u2(t)
=Accos(2πfct) u1(t) R1. m(t) u2(t)")
25
u2 π/4 u1 Jeżeli |m(t)|<<Ac, to napięcie u2(t) opisuje zależność: co można krótko zapisać:
|<<Ac, to napięcie u2(t) opisuje zależność: co można krótko zapisać:")
26
gdzie funkcja g(t) reprezentuje falę prostokątną
o okresie Tc=1/fc i połówkowym współczynniku wypełnienia g(t) c(t) Tc
 c(t) Tc.")
27
reprezentuje pożądany zmodulowany amplitudowo
Szereg Fouriera funkcji g(t) jest: i podstawiając mamy: Składnik: reprezentuje pożądany zmodulowany amplitudowo sygnał
 jest: i podstawiając mamy: Składnik: reprezentuje pożądany zmodulowany amplitudowo. sygnał.")
28
zawiera w widmie funkcje δ[(fc -2nfc)], gdzie n=1,2,...
reszta: zawiera w widmie funkcje δ[(fc -2nfc)], gdzie n=1,2,... i δ(0). Eliminujemy te częstotliwości za pomocą filtru środkowoprzepustowego o częstotliwości środkowej fc i szerokości 2W. Demodulacja Prosty demodulator zwany detektorem obwiedni
![zawiera w widmie funkcje δ[(fc -2nfc)], gdzie n=1,2,...](http://slideplayer.pl/slide/423879/1/images/28/zawiera+w+widmie+funkcje+%CE%B4%5B%28fc+-2nfc%29%5D%2C+gdzie+n%3D1%2C2%2C....jpg "reszta: zawiera w widmie funkcje δ[(fc -2nfc)], gdzie n=1,2,... i δ(0). Eliminujemy te częstotliwości za pomocą. filtru środkowoprzepustowego o częstotliwości. środkowej fc i szerokości 2W. Demodulacja. Prosty demodulator zwany detektorem obwiedni.")
29
Rs R uwyj(t) C s(t)
 C s(t)")
30
Sygnał zmodulowany amplitudowo u(t)=Um[1+msin(0t)]sin(t)
![Sygnał zmodulowany amplitudowo u(t)=Um[1+msin(0t)]sin(t)](http://slideplayer.pl/slide/423879/1/images/30/Sygna%C5%82+zmodulowany+amplitudowo+u%28t%29%3DUm%5B1%2Bmsin%28%EF%81%B70t%29%5Dsin%28%EF%81%B7t%29.jpg "Sygnał zmodulowany amplitudowo u(t)=Um[1+msin(0t)]sin(t)")
31
uwyj(t)
")
32
Zalety, ograniczenia i modyfikacje
modulacji amplitudy Modulacja amplitudy jest nieekonomiczna ze względu na moc. Strata mocy przy przesyle fali nośnej 2. Modulacja amplitudy jest nieekonomiczna ze względu na szerokość pasma. Wstęgi boczne górna i dolna są ze sobą związane symetryczne względem nośnej, co oznacza, że wystarczy znajomość tylko jednej wstęgi co pozwoliło- by ograniczyć szerokość kanału do W.

33
Stosuje się trzy modyfikacje modulacji amplitudy:
Modulacja dwuwstęgowa ze stłumioną falą nośną DSB-S.C. 2. Modulacja z częściowo stłumioną wstęgą boczną VSB 3. Modulacja jednowstęgowa DCB-SC

34
Modulacja dwuwstęgowa ze stłumioną falą nośną DSB-SC
Modulacja DSB-SC polega na wytworzeniu iloczynu sygnału informacyjnego m(t) i fali nośnej c(t) zmiana fazy sygnału modulującego
 i fali nośnej c(t) zmiana fazy. sygnału. modulującego.")
35
Transformata Fouriera sygnału s(t) jest:
M(f) -W f W S(f) fala DSB-SC 0.5AcM(0) -fc fc 2W 2W f
 -W. f. W. S(f) fala DSB-SC. 0.5AcM(0) -fc. fc. 2W. 2W. f.")
36
Modulator pierścieniowy
b fala modulujaca m(t) fala zmodulowana s(t) c d fala nośna c(t)
 fala. zmodulowana. s(t) c. d. fala. nośna. c(t)")
37
m(t) t c(t) t
 t c(t) t")
38
s(t) t Rozwinięcie prostokątnej fali nośnej ma postać: Sygnał wyjściowy modulatora pierścieniowego
 t Rozwinięcie prostokątnej fali nośnej ma postać: Sygnał wyjściowy modulatora pierścieniowego")
39
ma postać: Jeżeli widmo sygnału m(t) ma szerokość 2W, to widmo sygnału s(t) jest: S(f) filtr środkowo- przepustowy -fc -3fc fc f 3fc 2W Jeżeli fc>W, to nie ma nakładania się wstęg bocznych

40
Detekcja koherentna Sygnał modulujący m(t) może zostać odzyskany z fali zmodulowanej s(t) gdy pomnożymy przez lokalnie wygenerowaną falę sinusoidalną: Modulator iloczynowy Filtr dolno- przepustowy v(t) v0(t) s(t) Oscylator lokalny
 v0(t) s(t) Oscylator. lokalny.")
41
V(f) 0.5AdAcM(0)cos 2W 2fc -2fc f
 0.5AdAcM(0)cos 2W 2fc -2fc f")
42
Jeżeli =0, to sygnał wyjściowy proporcjonalny do m(t)
natomiast dla =π/2 sygnał wyjściowy jest równy zeru przypadek =π/2 nazywamy efektem zera kwadraturowego Niestety faza zmienia się losowo co powoduje kłopoty z detekcją i dlatego należy zadbać aby lokalny generator był w synchronizmie zarówno jeżeli chodzi o częstotliwość jak i fazę z falą nośną nadajnika

43
stosowany dla demodulacji fal DSB-SC
Odbiornik Costasa stosowany dla demodulacji fal DSB-SC kanał I 0.5Accosm(t) modulator iloczynowy filtr dolno- przepustowy cos(2πfct+) oscylator sterowany napięciem dyskrymi- nator fazy DSB-SC Accos(2πfct)m(t) przesuwnik fazy - 900 sin(2πfct+) modulator iloczynowy filtr dolno- przepustowy 0.5Acsinm(t) kanał Q
 modulator. iloczynowy. filtr dolno- przepustowy. cos(2πfct+) oscylator. sterowany. napięciem. dyskrymi- nator fazy. DSB-SC. Accos(2πfct)m(t) przesuwnik. fazy sin(2πfct+) modulator. iloczynowy. filtr dolno- przepustowy. 0.5Acsinm(t) kanał Q.")
44
Detektor kanału I jest nazywany detektorem koherentnym synfazowym
a detektor kanału Q detektor koherentny kwadraturowy Jeżeli =0, to sygnał wyjściowy jest 0.5Acm(t) w kanale I oraz zero w kanale Q. Jeżeli nastąpi odchylenie od =0, to dla małych kątów mamy sin≈ i pojawia się proporcjonalny do sygnał w kanale Q co jest wykorzystane do sterowania oscylatora sterowanego napięciem.
 w kanale I oraz zero w kanale Q. Jeżeli nastąpi odchylenie od =0, to dla małych kątów. mamy sin≈ i pojawia się proporcjonalny do sygnał w kanale Q co jest wykorzystane do sterowania. oscylatora sterowanego napięciem.")
45
u(t)=Acm(t)cos(2πfct) widmo sygnału zmodulowanego jest:
Filtracja wstęg modulator iloczynowy s(t) m(t) u(t) filtr środkowo- przepustowy H(f) sygnał zmodulowany Accos(2πfct) u(t)=Acm(t)cos(2πfct) widmo sygnału zmodulowanego jest: Naszym celem jest określić taką transmitancję H(f) filtru, aby można odtworzyć m(t) za pomocą detekcji koherentnej
 m(t) u(t) filtr środkowo- przepustowy. H(f) sygnał. zmodulowany. Accos(2πfct) u(t)=Acm(t)cos(2πfct) widmo sygnału zmodulowanego jest: Naszym celem jest określić taką transmitancję H(f) filtru, aby można odtworzyć m(t) za pomocą detekcji. koherentnej.")
46
sygnał zdemodulowany v0(t) s(t) v(t) modulator iloczynowy filtr dolno- przepustowy Adcos(2πfct) Zakładamy, że w detektorze mamy falę Adcos(2πfct) dokładnie zsynchronizowaną zarówno co do częstotliwości jak i fazy z falą nośną Accos(2πfct). Mamy: ale z wynika, że
 dokładnie zsynchronizowaną zarówno co do częstotliwości. jak i fazy z falą nośną Accos(2πfct). Mamy: ale z. wynika, że.")
47
Składowe o częstotliwości 2fc eliminujemy za pomocą
czyli Składowe o częstotliwości 2fc eliminujemy za pomocą filtru dolnoprzepustowego i na wyjściu mamy sygnał: Dla uzyskania sygnału należy spełnić warunek:

48
Modulacja z częściowo stłumioną wstęgą boczną VSB
Charakterystyka amplitudowa filtru |H(f)| 1 0.5 f fc-fv fc fc+fv fc+W Metoda stosowana w TV do przesyłu sygnału wizyjnego
| f. fc-fv. fc. fc+fv. fc+W. Metoda stosowana w TV do przesyłu sygnału wizyjnego.")
49
Modulacja jednowstęgowa SSB
|M(f)| -fb -fa fa fb f luka energetyczna Dla wyeliminowania częstotliwości nośnej i wyboru wstęgi musimy dysponować filtrem o charakterystyce:
| -fb. -fa. fa. fb. f. luka. energetyczna. Dla wyeliminowania częstotliwości nośnej i wyboru. wstęgi musimy dysponować filtrem o charakterystyce:")
50
|H(f)| -fc fc f -fc-fb -fc-fa fc+fa fc+fb i otrzymamy widmo sygnału z górną wstęgą boczną |S(f)|
| -fc fc f -fc-fb -fc-fa fc+fa fc+fb i otrzymamy widmo sygnału z górną wstęgą boczną |S(f)|")
51
Modulacja jednowstęgowa jest nazywana: przemianą częstotliwości,
Przesuw częstotliwości Modulacja jednowstęgowa jest nazywana: przemianą częstotliwości, mieszanie lub heterodynowanie |M(f)| Widmo sygnału oryginalnego -fb -fa fa fb f
| Widmo sygnału. oryginalnego. -fb. -fa. fa. fb. f.")
52
|S1(f)| f fa-fc1 -fb-fc1 -fc1 -fa-fc1 fb-fc1 fc1 i ponownie przesuwamy widmo do częstotliwości nośnej fc2. Dla uzyskania przesunięcia do nowej częstotliwości nośnej stosujemy mieszacz:

53
s1(t) sygnał zmodulowany o częstotliwości nośnej fc1
modulator iloczynowy s1(t) fc1 filtr środkowo- przepustowy H(f) s2(t) fc2 Mieszacz powoduje przesuw częstotliwości o fm – częstotliwość lokalnego generatora i mamy: fc2=fc1+fm Amcos(2πfmt) Jeżeli f2>f1, to dobieramy częstotliwość generatora lokalnego z zależności: fm=fc2-fc1, w przypadku f2<f1 mamy: fm=fc1-fc2.
 fc1. filtr środkowo- przepustowy. H(f) s2(t) fc2. Mieszacz powoduje przesuw. częstotliwości o fm – częstotliwość. lokalnego generatora i mamy: fc2=fc1+fm. Amcos(2πfmt) Jeżeli f2>f1, to dobieramy częstotliwość generatora. lokalnego z zależności: fm=fc2-fc1, w przypadku f2<f1 mamy: fm=fc1-fc2.")
54
Zwielokrotnianie częstotliwości
Dla lepszego wykorzystania kanału komunikacyjnego stosuje się przesył kilku różnych nadawców za pomocą techniki zwanej zwielokrotnianiem częstotliwościowym skrót - FDM Filtry LP – są dolnoprzepustowe, aby wyeliminować ewentualne składowe wysokoczęstotliwościowe mogące zakłócić pozostałe sygnały. Najczęściej stosuje się modulację jednowstęgową, np. w przesyle rozmów telefonicznych dla każdego sygnału przyznaje się pasmo 4kHz.

55
Schemat blokowy systemu FDM
Nadajnika odbiornik

56
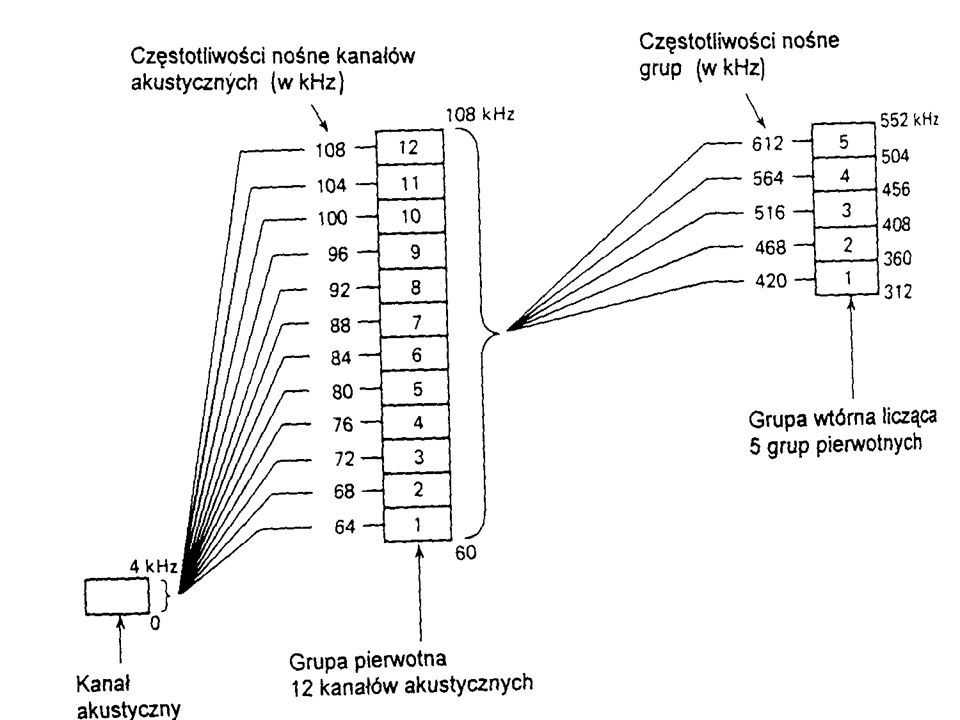
Ilustracja poszczególnych etapów modulacji
Najczęściej stosuje się systemy modulacji wielokrotnej np. fala nośna na pierwszym poziomie 60kHz i 12 kanałów akustycznych fc=60+4n, gdzie n=1,2,...,12. Po wyselekcjonowaniu dolnych wstęg bocznych otrzymujemy pasmo o częstotliwości 60÷108kHz. Następnie łączy się po 5 takich grup modulując n-tą grupę częstotliwością fc2=372+48n, gdzie n=1,2,3,4,5, co daje dla grupy wtórnej pasmo: 312÷552kHz. Kolejno łączy się w następne grupy: trzeciego, czwartego, ... stopnia. Ilustracja poszczególnych etapów modulacji w systemie FDM

58
Stała amplituda fali nośnej, co zapewnia większą
Modulacja kąta Stała amplituda fali nośnej, co zapewnia większą odporność na szumy Sygnał fali zmodulowanej kątowo jest: Częstotliwość chwilową sygnału zmodulowanego kątowo definiujemy: Istnieją dwie podstawowe modulacje kąta:

59
1. Modulacja fazy(PM): fc – częstotliwość fali nośnej kp – czułość fazowa modulatora
: fc – częstotliwość fali nośnej kp – czułość fazowa modulatora")
60
s(t)
")
61
2. Modulacja częstotliwości (FM)
kf – czułość częstotliwościowa modulatora Biorąc pod uwagę, że mamy: Sygnał zmodulowany częstotliwość ma postać:

62
s(t)
")
63
integrator modulator fazy m(t) fala FM Accos(2πfct) różniczkuje modulator fazy m(t) fala PM Accos(2πfct) Jak widać wystarczy rozpatrzyć jeden rodzaj
 Jak widać wystarczy rozpatrzyć jeden rodzaj.")
64
Modulacja częstotliwości
Modulacja częstotliwości jest procesem nieliniowym Bardzo trudna jest analiza Fouriera i dlatego trzeba zastosować prosty model W pierwszym etapie zostanie rozpatrzona modulacja jednotonowa czyli Częstotliwość chwilowa sygnału FM jest:

65
gdzie Δf=kfAm – dewiacja częstotliwości
Z zależności: mamy: - wskaźnik modulacji czyli Sygnał FM ma postać:

66
Rozróżniamy dwa rodzaje modulacji:
a. wąskopasmowa β<1 rad b. szerokopasmowa β>1 rad Modulacja wąskopasmowa ale dla β<1 rad mamy: i a więc lub

67
a więc wąskopasmowa modulacja ma widmo
o szerokości pasma 2fm podobnie jak sygnał AM. Szerokość pasma w przypadku ogólnym jest podana przybliżonym wzorem Carsona dla modulacji jednotonowej:

Podobne prezentacje












>")
=U m e -α|t|, gdzie α>0. i mamy:>")






