Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

2
DANE INFORMACYJNE Nazwa szkoły:
Zespół Szkół Ponadgimnazjalnych w Trzebiatowie i Zespół Szkół Politechnicznych we Wrześni ID grupy: 97/72_MF_G1 Opiekun: Adam Kupczyk Kompetencja: matematyczno-fizyczna Temat projektowy: Maszyny proste wokół nas Semestr/rok szkolny: V / 2012

3
„Dajcie mi punkt podparcia a podniosę Ziemię”
Archimedes

4
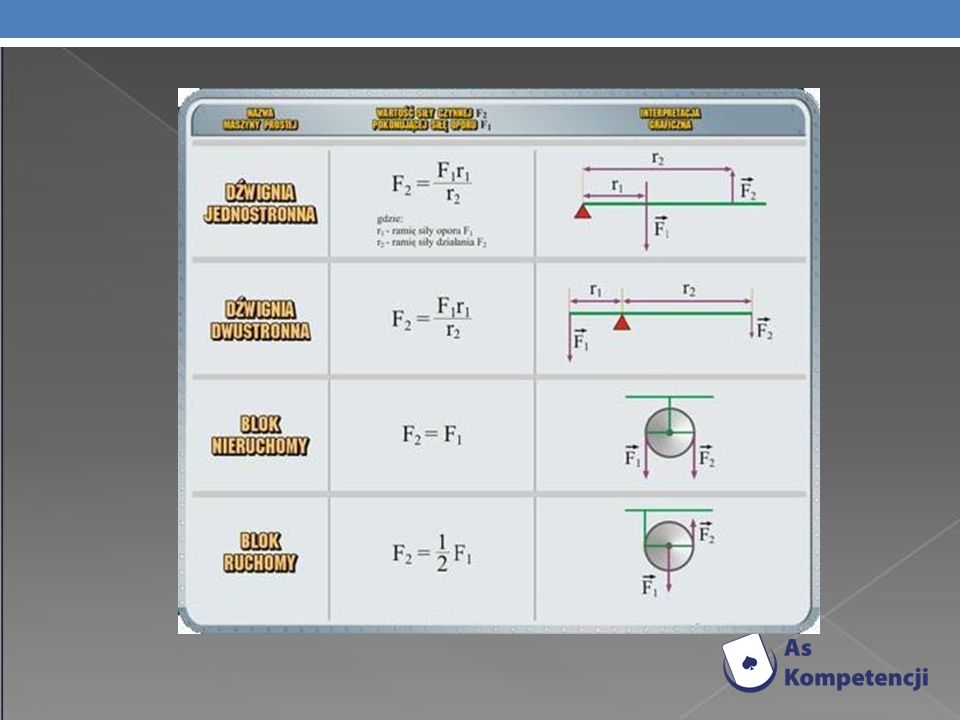
Maszyny proste są to urządzenia, które w swoim działaniu wykorzystują różne prawa fizyczne, tak aby używając jak najmniejszej siły przesunąć lub podnieść ciało. STOSUJĄC MASZYNY PROSTE, ZYSKUJEMY NA SILE, ALE NIE ZYSKUJEMY NA PRACY!!! OBROTOWE: Dźwignia jednostronna Dźwignia dwustronna Blok stały Blok ruchomy Kołowrót PRZESUWANE: Równia pochyła Klin

7
Archimedes używał dźwigni do podnoszenia
Dźwignie służą często do unoszenia ciężkich przedmiotów. Dzięki użyciu tej maszyny prostej można to zrobić za pomocą wyraźnie mniejszej siły, niż wynosi ciężar przedmiotu. Dźwignia może służyć także do podważania, rozdzielania mocno złączonych elementów. Archimedes używał dźwigni do podnoszenia wielkich kamieni. Znane jest jego powiedzenie "Dajcie mi punkt podparcia, a poruszę Ziemię"

8
KRÓTKA CHARAKTERYSTYKA
SCHEMAT To belka lub pręt podparty, na którym po tej samej stronie osi obrotu działają co najmniej dwie siły o przeciwnych zwrotach.

9
Warunek na zachowanie równowagi w dźwigni jednostronnej:

10
W praktyce dźwignie jednostronne są wykorzystywane np. w:
Taczce Dziadku do orzechów Podnośniku samochodów Ludzkim organizmie- stawy kończyn Łomie

11
Praktyczne przykłady dźwigni

12
KRÓTKA CHARAKTERYSTYKA
To belka lub pręt zawieszony lub podparty, na który po obu stronach osi obrotu działaj co najmniej jedna siła o zgodnych zwrotach. MODEL

13
Warunek na zachowanie równowagi w dźwigni dwustronnej:

14
W praktyce dźwignie dwustronne są wykorzystywane np. w:
Nożyczkach Szczypcach Obcęgach Żurawiach do czerpania wody ze studni

15
KRÓTKA CHARAKTERYSTYKA
SCHEMAT Posiadana obwodzie rowek i obraca się wokół stałej osi. Na krążek nałożona jest linka. Na jednym końcu tej linki zamieszczamy ciało przeznaczone do podniesienia, a do drugiego końca przykładamy siłę potrzebną do zrównoważenia ciężaru ciała.

16
Warunek na zachowanie równowagi dla bloku nieruchomego:

17
W praktyce bloki stałe są wykorzystywane np. w:
Pracach budowlanych Rolnictwie W systemach zwijania i wciągania żagli w średniowiecznych statkach

18
Bloki w żegludze

19
KRÓTKA CHARAKTERYSTYKA
Blok zawieszony na lince, której jeden koniec jest na stałe przywiązany do belki, do drugiego zaś przyłożona jest siła równoważąca ciężar podnoszonego ciała. Jest przykładem dźwigni jednostronnej. Swoje zastosowanie ma w jachtingu SCHEMAT

20
Bloki ruchome - wielokrążki

21
KRÓTKA CHARAKTERYSTYKA
Walec z umocowaną na jego końcu korbą. Na walec nawinięte jest cięgno, na koniec którego działa siła „Q” zwana siłą użyteczną, natomiast „P” jest siłą poruszającą. SCHEMAT

22
Warunek na zachowanie równowagi dla kołowrotu

23
W praktyce kołowroty są wykorzystywane np. w:
Kierownicy w samochodzie Klamkach w drzwiach Pedałach w rowerze Studni Kurkach w zlewozmywaku

24
Kołowroty w gospodarstwie domowym

25
KRÓTKA CHARAKTERYSTYKA
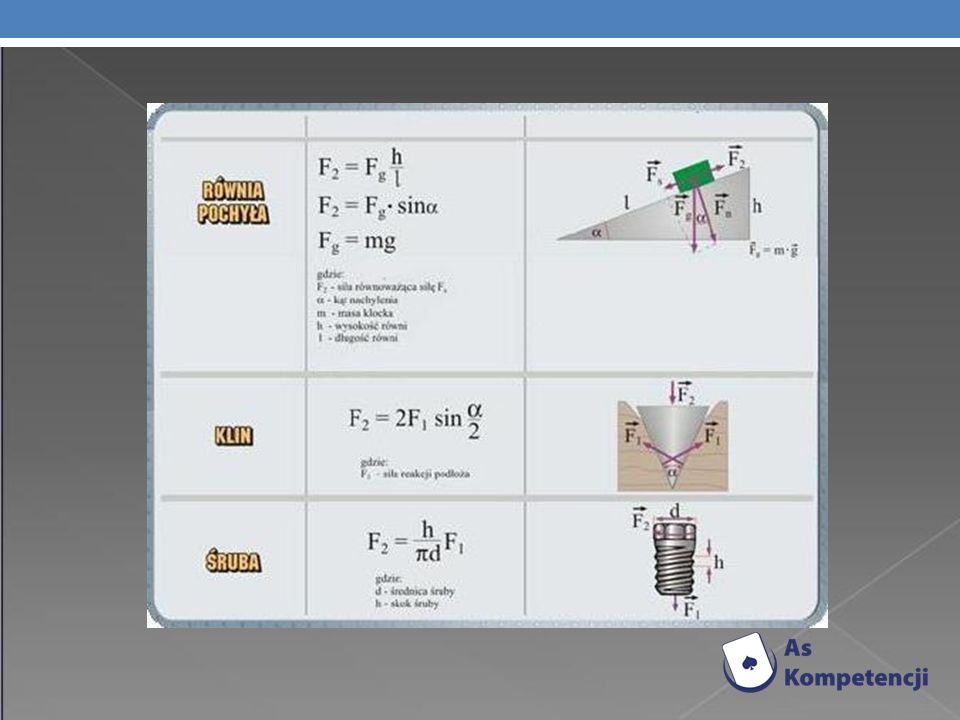
SCHEMAT Równia pochyła jest to ciało sztywne, którego jedna powierzchnia stanowi płaszczyznę ustawioną pod pewnym kątem do kierunku działania siły. W wielu przypadkach zamiast podnosić przedmiot na znaczną wysokość, wtacza się go po równi pochyłej. h

26
Wartość siły F utrzymującej ciało w równowadze na równi jest tyle
razy mniejsza od wartości jego ciężaru G, ile razy wysokość równi h jest mniejsza od długości równi l.

27
W praktyce równie pochyłe są wykorzystywane np. na:
Skoczniach narciarskich Schodach

28
Równia pochyła Galileusza
W XVII wieku Galileusz wykorzystał obserwacje staczających się po równi pochyłej kul o różnych ciężarach, do sformułowania rewolucyjnego na owe czasy wniosku, że prędkość spadającego swobodnie ciała nie zależy od jego masy. Przeczyło to przyjmowanym wtedy powszechnie (a spotykanym również obecnie!) poglądom Arystotelesa , że ciało spada tym prędzej im jest cięższe. Na podstawie tych obserwacji Galileusz sformułował też swą regułę spadku swobodnego: w kolejnych jednostkach czasu spadające swobodnie ciało przebywa drogi proporcjonalne do kolejnych liczb nieparzystych Przyjmuje się powszechnie, że równie pochyłe posłużyły do budowy piramid w starożytnym Egipcie.
 poglądom Arystotelesa , że ciało spada tym prędzej im jest cięższe. Na podstawie tych obserwacji Galileusz sformułował też swą regułę spadku swobodnego: w kolejnych jednostkach czasu spadające swobodnie ciało przebywa drogi proporcjonalne do kolejnych liczb nieparzystych. Przyjmuje się powszechnie, że równie pochyłe posłużyły do budowy piramid w starożytnym Egipcie.")
29
KLIN Klin jest szczególnym wykorzystaniem równi pochyłej. Jest on wykorzystywany do rozdzielania silnie ze sobą połączonych powierzchni, lub wręcz do rozdzielania ciał na części (np. do rozszczepiania kawałków drewna). Klin jest bardzo efektywnym narzędziem, ponieważ może dostarczać bardzo dużego zysku na sile.
. Klin jest bardzo efektywnym narzędziem, ponieważ może dostarczać bardzo dużego zysku na sile.")
30
Zależność pomiędzy siłami określa wzór:

31
Śruba Śruba - będąca elementem konstrukcyjnym (Śruba (złącze)) rozpatrywana jako maszyna prosta jest równią pochyłą nawiniętą na walec. Śruba scharakteryzowana jest przez jej średnicę (d) oraz skok gwintu (h). Między parametrami tymi a kątem nachylenia równi zachodzi związek:
 oraz skok gwintu (h). Między parametrami tymi a kątem nachylenia równi zachodzi związek:")
32
Przekładnie jako przykład praktycznego wykorzystania maszyn prostych
reduktor (przekładnia redukująca) – gdy człon napędzany obraca lub porusza się z mniejszą prędkością niż człon napędzający multiplikator (przekładnia multiplikująca) – gdy człon napędzany obraca lub porusza się z większą prędkością niż człon napędzający Przekładnia o zmiennym przełożeniu nazywana jest wariatorem
 – gdy człon napędzany obraca lub porusza się z mniejszą prędkością niż człon napędzający. multiplikator (przekładnia multiplikująca) – gdy człon napędzany obraca lub porusza się z większą prędkością niż człon napędzający. Przekładnia o zmiennym przełożeniu nazywana jest wariatorem.")
33
reduktor multiplikator wariator

34
Maszyny proste w nowoczesnych urządzeniach
Robot jest mechanicznym urządzeniem wykonującym zadania w sposób automatyczny. Działanie robota może być kontrolowane przez człowieka, przez wprowadzony wcześniej program, bądź przez zbiór ogólnych reguł, które zostają przełożone na działanie robota przy pomocy technik sztucznej inteligencji. Roboty często zastępują człowieka przy monotonnych, złożonych z powtarzających się kroków czynnościach, które mogą wykonywać znacznie szybciej od ludzi.

35
Robot humanoidalny Asimo

36
Robot przemysłowy

37
Robot wojskowy Talon

38
Wózek widłowy, który w swej prostocie jest wspaniały

39
Zajęcia „Asa kompetencji” były OK. !
Dziękujemy

Podobne prezentacje






>")




>")









