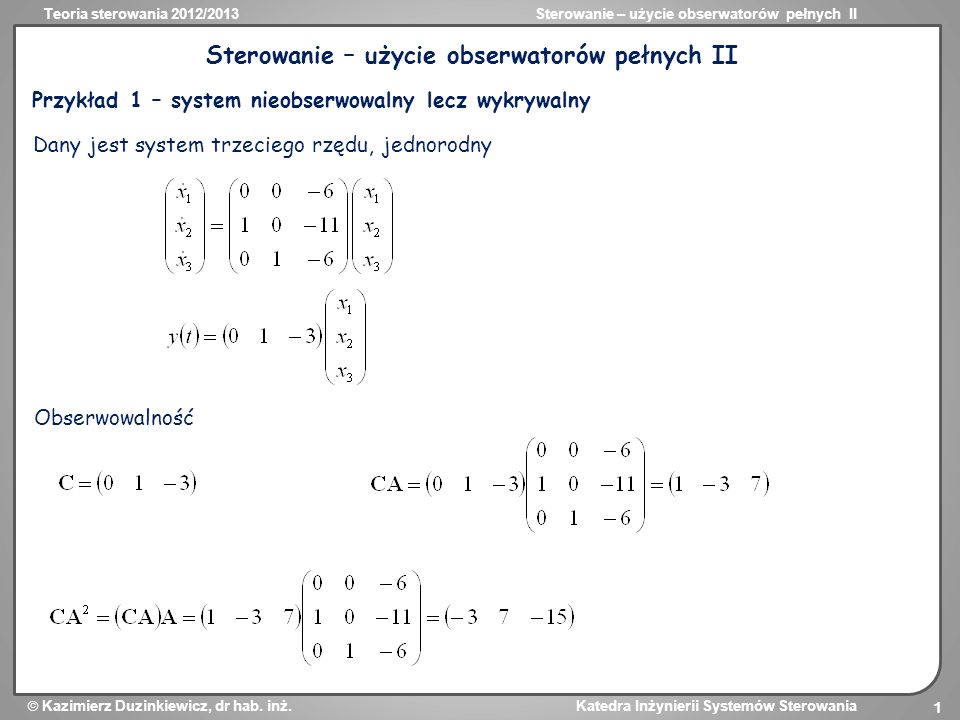
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 1 Sterowanie – użycie obserwatorów pełnych II Przykład 1 – system nieobserwowalny lecz wykrywalny Dany jest system trzeciego rzędu, jednorodny Obserwowalność
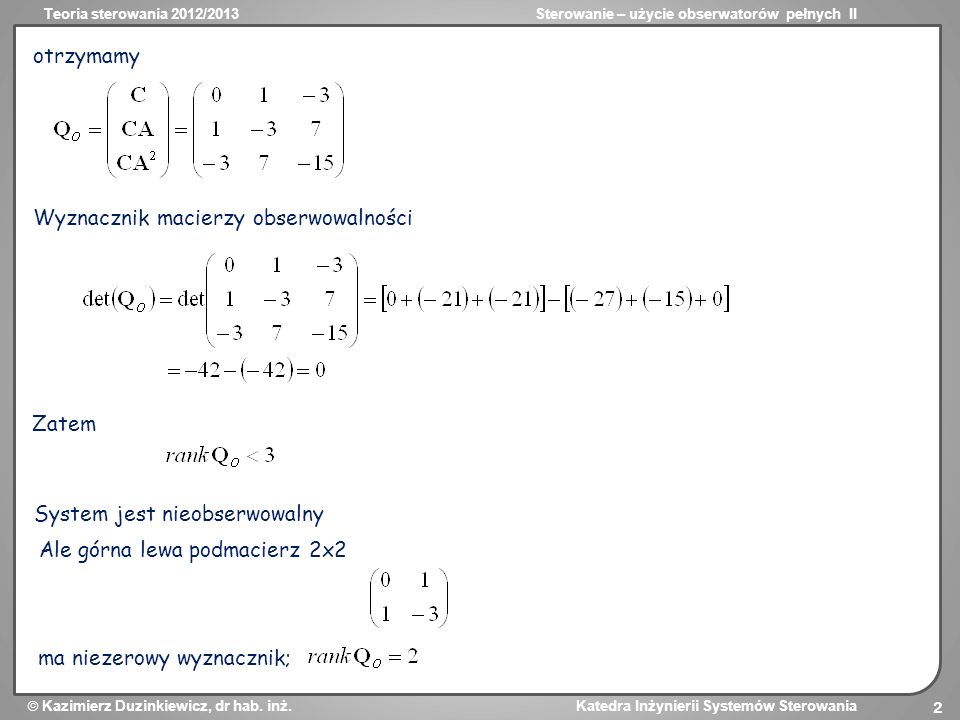
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 2 otrzymamy Wyznacznik macierzy obserwowalności Zatem System jest nieobserwowalny Ale górna lewa podmacierz 2x2 ma niezerowy wyznacznik;
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 3 Dekompozycja na podprzestrzenie obserwowalne/wykrywalne Dwa pierwsze wiersze macierzy przekształcenia podobieństwa do postaci zdekomponowanej Dodatkowy wiersz dla utworzenia macierzy przekształcenia podobieństwa Zatem policzymy stąd Sprawdzić, że
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 4 Transformacja do nowych zmiennych stanu Macierze systemu transformowanego gdzie
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 5 oraz gdzie Para jest obserwowalna Część nieobserwowalna jest stabilna – system jest wykrywalny
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 6 Wybierzmy wartości własne dynamiki błędu obserwatora Wielomian charakterystyczny dla dynamiki błędu obserwatora (dla części obserwowalnej) Zastosujemy wzór Ackermanna
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 7 Wielomian charakterystyczny macierzy stanu Zatem
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 8 Trzecią składową wektora wzmocnień możemy przyjąć dowolnie, np. równą zero Retransformacja do pierwotnego układu zmiennych stanu
Teoria sterowania 2012/2013Sterowanie – użycie obserwatorów pełnych II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 9 Dziękuję za uczestnictwo w wykładzie i uwagę