Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 1 Obserwatory zredukowane II System trzeciego rzędu System SISO Wartości własne systemu (bieguny systemu) Złożenie: człon pierwszego rzędu inercyjny, człon drugiego rzędu oscylacyjny Parametry: - człon pierwszego rzędu inercyjny: stała czasowa bezwładności - - człon drugiego rzędu oscylacyjny: pulsacja drgań własnych nietłumionych - współczynnik tłumienia - Przykład 2 (z W8):
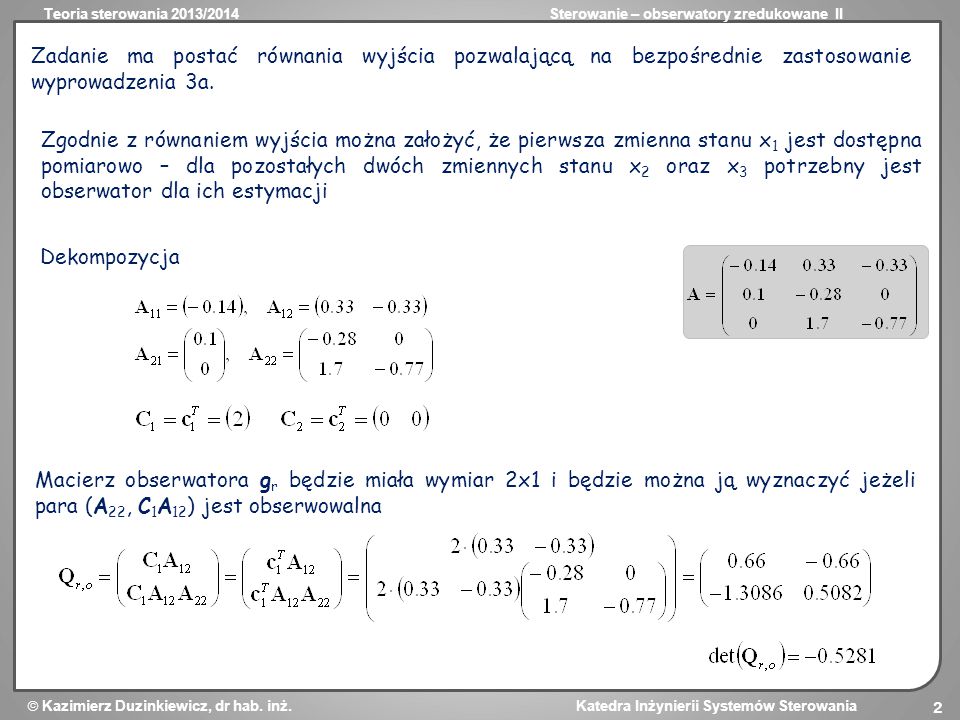
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 2 Zadanie ma postać równania wyjścia pozwalającą na bezpośrednie zastosowanie wyprowadzenia 3a. Zgodnie z równaniem wyjścia można założyć, że pierwsza zmienna stanu x 1 jest dostępna pomiarowo – dla pozostałych dwóch zmiennych stanu x 2 oraz x 3 potrzebny jest obserwator dla ich estymacji Dekompozycja Macierz obserwatora g r będzie miała wymiar 2x1 i będzie można ją wyznaczyć jeżeli para (A 22, C 1 A 12 ) jest obserwowalna
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 3 Wymagamy, aby obserwator był istotnie szybszy od systemu – wybrane zostały wartości własne macierzy systemu obserwatora jako Wielomian charakterystyczny postulowanego obserwatora Zastosujemy dualne twierdzenie Ackermann’a W twierdzeniu Ackermann’a należy podstawić
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 4 Macierz wzmocnień obserwatora zredukowanego (wzór dualny Ackermann’a) W przykładzie Otrzymamy
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 5 Stąd oraz
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 6 Wyniki symulacji Warunki początkowe systemu Warunki początkowe obserwatora
Teoria sterowania 2013/2014Sterowanie – obserwatory zredukowane II Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 7 Dziękuję za uczestnictwo w wykładzie i uwagę