Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 1 Metody sztucznej inteligencji Automatyka i Robotyka - studia stacjonarne II stopnia Wykład /2016 Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynierii Systemów Sterowania Systemy rozmyte – wnioskowanie – podejście Mamdani’ego
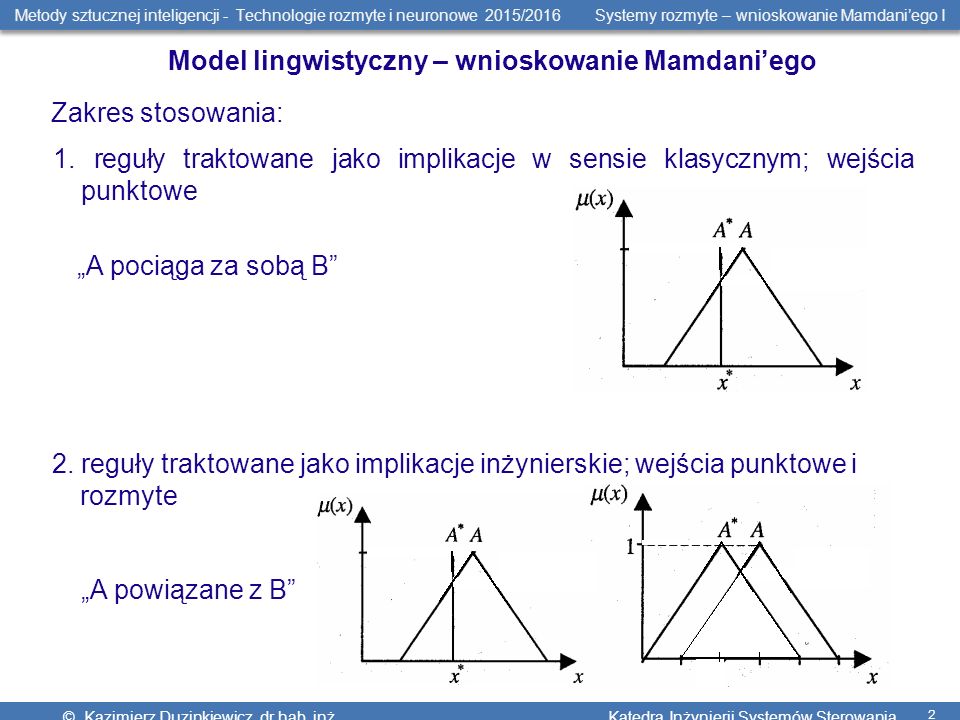
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 2 Model lingwistyczny – wnioskowanie Mamdani’ego Zakres stosowania: 1. reguły traktowane jako implikacje w sensie klasycznym; wejścia punktowe „A pociąga za sobą B” 2. reguły traktowane jako implikacje inżynierskie; wejścia punktowe i rozmyte „A powiązane z B”
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 3 Szkic metody Mamdani’iego – stwierdzenie przesłanki jednoatomowe Załóżmy, że wartość wejścia rozmytego x wynosi: dla którego wartość wyjścia rozmytego y jest określana ze złożeniowej reguły wnioskowania dla relacji R danej zbiorem reguł:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 4 Ponieważ korzystamy z operatorów implikacji inżynierskich czyli z t- norm, więc agregacja reguł zbioru R może być uzyskana za pomocą operatora połączenia max gdzie I jest operatorem t-normy (implikacja inżynierska) zatem: stąd, w oparciu o złożeniową regułę wnioskowania
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 5 Po przekształceniach, otrzymuje się ostatecznie: Oznaczmy Wielkość tę nazywa się stopniem spełnienia (degree of fulfillment) przesłanki i-tej teguły Zatem:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 6 Wnioskowanie Mamdani’ego 1. Oblicz stopień spełnienia przesłanki każdej z reguł przez dane wejście: 2. Oblicz zbiory rozmyte wyjścia każdej z reguł dla danego wejścia : 3. Zagreguj zbiory rozmyte wyjścia uzyskując odpowiedź systemu:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 7 Wnioskowanie Mamdani’ego – czysty system rozmyty -ilustracja
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 8 Przykład – model lingwistyczny spalania gazu przy stałym natężeniu dopływu gazu (system SISO) Mieliśmy: Zbiory rozmyte wejścia Zbiory rozmyte wyjścia Baza reguł: Zbiór rozmyty wejścia - Somewhat Low (raczej niskie)
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 9 Procedura wnioskowania Mamdani’ego 1. Obliczenie stopnia spełnienia przesłanek Wybieramy t-normę MIN dla obliczania stopnie spełnienia przesłanek
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania Obliczenie zbiorów rozmytych wyjścia: Wybieramy t-normę MIN dla obliczania zbiorów rozmytych wyjścia każdej z reguł
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania Zagregowanie zbiorów rozmytych wyjścia: Max Approximately Low Uzyskany uprzednio wynik – podejście formalne
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 12 Przykład – model lingwistyczny poziomu cieczy w zbiorniku Mieliśmy: Zbiory rozmyte wejścia Zbiory rozmyte wyjścia Baza reguł:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 13 Niech zbiór rozmyty wejścia - singleton R 1 : stopień spełnienia przesłanki większy od zera R 2 : stopień spełnienia przesłanki większy od zera R 3 : stopień spełnienia przesłanki równy zeru
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 14 Agregacja zbioru rozmytego wyjścia Jakiego poziomu cieczy można się spodziewać? Wynik wnioskowania rozmytego B’ jest zbiorem rozmytym ! Jeżeli występuje wymaganie, aby wyjście systemu rozmytego był ostrą liczbą, wyjściowy zbiór rozmyty musi być poddany wyostrzaniu - defuzyfikacji
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 15 Wyostrzanie - defuzyfikacja Defuzyfikacja zbioru rozmytego B’(y) (całościowej wynikowej funkcji przynależności zbioru reguł i faktu) to operacja określenia „ostrej” wartości y’ reprezentującej ten zbiór (w sposób jak najbardziej sensowny) Najbardziej znane metody defuzyfikacji: metoda środka maksimum (SM) – Middle of Max (MOM), Mean of Maxima (MOM) metoda pierwszego maksimum (PM) – Smallest of Max (SOM), metoda ostatniego maksimum (OM) – Largest of Max (LOM) metoda środka ciężkości (SC) - Centroid of Area (COA), Center of Gravity (COG) metoda środka sum (SS) - Bisector of Area (BOA)
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 16 Wyostrzanie - defuzyfikacja
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 17 Metoda środka ciężkości (SC) za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności przyjmuje współrzędną y środka ciężkości powierzchni pod krzywą określoną tą funkcją Metoda środka ciężkości (SC) - Centroid of Area (COA), Center of Gravity (COG)
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 18 Metoda środka maksimum (SM) - Middle of Max (MOM) Metoda środka maksimum (SM) za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności przyjmuje współrzędną y będącą wartością średnią wyjść dla których wynikowa funkcja przynależności osiąga maksimum
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 19 Metoda środka sum (SS) - Bisector of Area (BOA) Metoda środka sum (SS) za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności przyjmuje współrzędną y spełniającą zależność gdzie:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 20 Metoda środka ciężkości (COA, COG) stosowana jest we wnioskowaniu Mamdani’ego (podejście uproszczone) Metoda środka maksimum (MOM) stosowana jest we wnioskowaniu opartym na podejściu formalnym
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 21 Przykład – ponownie, model lingwistyczny spalania gazu przy stałym natężeniu dopływu gazu (system SISO) Approximately Low
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 22 Podsumowanie : Rozważane dotychczas modele miały struktury obejmujące przypadki: - prosta przesłanka – jedna reguła - prosta przesłanka – wiele reguł Skupienie uwagi na: W schemacie wnioskowania Mamdani’ego jako operator implikacji najczęściej stosowany jest operator MIN (zaproponowany oryginalnie przez Mamdani’ego) oraz operator PROD Zbiór rozmyty wejścia A’ jest najczęściej singletonem z jądrem x 0
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 23 Przypadki dotychczas rozważone: I. Jedna reguła – jedna przesłanka Fakt: x = A’ R: RegułaJEŚLI x = A TO y = B Wniosek y = B’ Wynik ogólny:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 24 Reprezentacja reguły – t-norma w Stopień spełnienia przesłanki implikacji przez fakt Przecięcie zbiorów – t - norma
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 25 Implikacja Mamdaniego lub Larsena oraz wejście - singleton Implikacja Mamdaniego (MIN), złożenie MIN: Dla: Implikacja Larsena (PROD), złożenie PROD:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 26 Implikacja Mamdaniego (MIN), złożenie MIN: Ilustracja graficzna : Implikacja Larsena (PROD), złożenie (PROD):
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 27 II. Dwie (wiele) reguły – jedna przesłanka Fakt: x = A’ R 1 : RegułaJEŚLI x = A 1 TO y = B 1 Wniosek y = B’ Wynik ogólny: R 2 : RegułaJEŚLI x = A 2 TO y = B 2 Niech Ponieważ operacja złożenia (implikacja) jest rozdzielna względem operacji połączenia (agregacja reguł) dowolna s-norma (t-konorma)
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 28 implikacja Mamdaniego (MIN), złożenie MIN, agregacja MAX: Ilustracja graficzna :
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 29 implikacja Larsena (PROD), złożenie (PROD), agregacja MAX:
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 30 Model lingwistyczny i proces wnioskowania z wykorzystaniem tego modelu przedstawiony został w ogólny sposób obejmujący przypadki SISO i MIMO Jednak Rozważane modele miały struktury obejmujące przypadki: - prosta przesłanka – jedna reguła - prosta przesłanka – wiele reguł Oznacza to, że w przypadku MIMO wszystkie zbiory rozmyte modelu rozważane były w jednej przestrzeni wektorowej z wielowymiarowymi funkcjami przynależności A wcześniej mówiliśmy, że Zwykle stwierdzenia przesłanek i stwierdzenia konkluzji formułowane są jako logiczne zdania w przestrzeni jednowymiarowej z funkcjami przynależności jednej zmiennej
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 31 Dla systemów MIMO: Potrzeba uogólnienia zaprezentowanych wyników na przypadek, kiedy funkcje przynależności występujące w stwierdzeniach są definiowane w przestrzeniach jednowymiarowych Ale na zakończenie Różne A’ Różne B” System rozmyty modeluje zależność wejście – wyjście Aproksymator
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 32 System Mamdaniego – aproksymator Przykład 1 Jeżeli X jest MAŁY TO Y jest MAŁY Jeżeli X jest ŚREDNI TO Y jest ŚREDNI Jeżeli X jest DUŻY TO Y jest DUŻY Realizacja: max – min, środek ciężkości
Metody sztucznej inteligencji - Technologie rozmyte i neuronowe 2015/2016 Systemy rozmyte – wnioskowanie Mamdani’ego I © Kazimierz Duzinkiewicz, dr hab. inż. Katedra Inżynierii Systemów Sterowania 33 Dziękuję – koniec materiału prezentowanego podczas wykładu