Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Automatyka Wykład 13 Regulator PID
(Regulator proporcjonalno-całkująco-różniczkujący) Dobór nastaw parametrów regulatora.
 Dobór nastaw parametrów regulatora.")
2
Równanie regulatora PID
(1) Odpowiedź skokowa (2) kp t h(t) arc tg kp/Ti 2kp Ti
 Odpowiedź skokowa. (2) kp. t. h(t) arc tg kp/Ti. 2kp. Ti.")
3
Transmitancja operatorowa regulatora PID
(3) Transmitancja widmowa (4)
 Transmitancja widmowa. (4)")
4
Charakterystyki częstotliwościowe charakterystyka amplitudowo-fazowa
= 0 kp = Im[Gr] Re[Gr] charakterystyki logarytmiczne

5
1/Ti 1/Td -900 +900 00 Lm() ()
 () ")
6
Struktury regulatora PID
struktura równoległa + kp E(s) U(s) struktura na wzmacniaczu ze sprzężeniem zwrotnym
 U(s) struktura na wzmacniaczu ze sprzężeniem zwrotnym.")
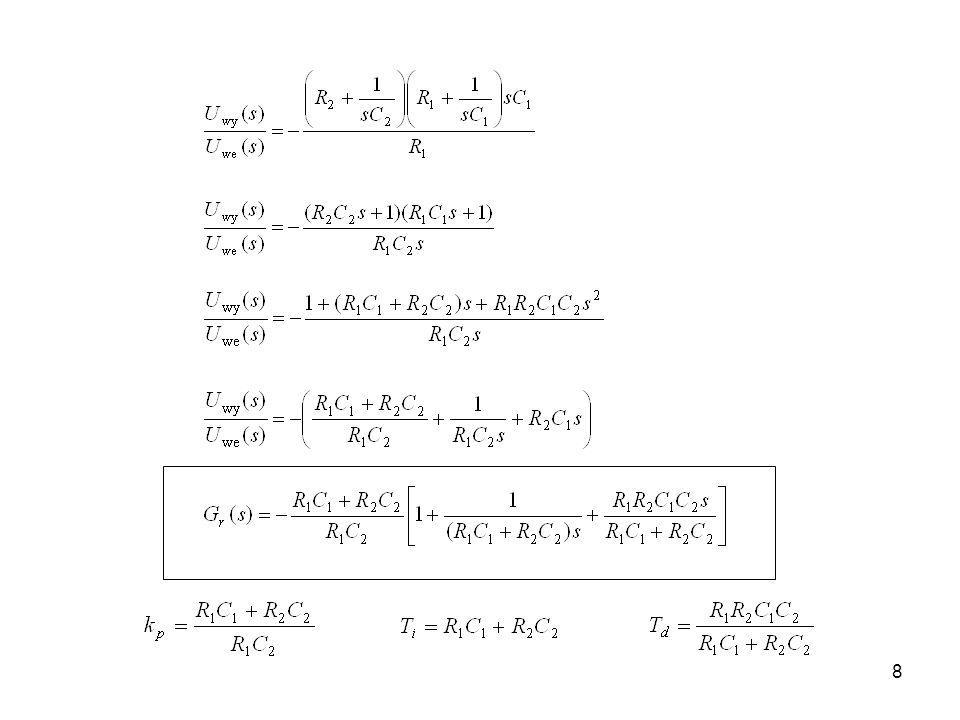
7
_ E(s) U(s) k R1 Uwe(s) Uwy(s) C1 R2 C2 _ + I(s)
 U(s) k R1 Uwe(s) Uwy(s) C1 R2 C2 _ + I(s)")
9
Regulator PID z inercją
Transmitancja operatorowa regulatora PID z inercją Odpowiedź skokowa t h Ti T kp

10
Transmitancja widmowa
Moduł i faza transmitancji

11
Charakterystyka amplitudowo-fazowa
Im[Gr(j)] Re[Gr(j)] = Logarytmiczna charakterystyka amplitudowa Logarytmiczna charakterystyka fazowa
] Re[Gr(j)] = Logarytmiczna charakterystyka amplitudowa. Logarytmiczna charakterystyka fazowa.")
12
-90o 0o +90o 1/Ti 1/Td 1/T 20logkp(1+Td/T) 20logkp Lm() [dB] ()
![-90o 0o +90o 1/Ti 1/Td 1/T 20logkp(1+Td/T) 20logkp Lm() [dB] ()](http://slideplayer.pl/slide/840360/2/images/12/-90o+0o+%2B90o+%EF%81%B7+1%2FTi+1%2FTd+1%2FT+20logkp%281%2BTd%2FT%29+20logkp+Lm%28%EF%81%B7%29+%5BdB%5D+%EF%81%AA%28%EF%81%B7%29.jpg "-90o 0o +90o 1/Ti 1/Td 1/T 20logkp(1+Td/T) 20logkp Lm() [dB] ()")
13
Zasady Zieglera - Nicholsa
W celu uzyskania w układzie automatycznej regulacji przebiegów z przeregulowaniem ok.20% i minimalnym czasem regulacji stosuje się przy doborze nastaw regulatora reguły podane przez Zieglera-Nicholsa. W myśl tych reguł należy najpierw niezależnie od typu regulatora uczynić z niego regulator typu P czyli w przypadku regulatora PID nastawić czas zdwojenia Ti = oraz czas wyprzedzenia Td = 0. Wzmocnienie regulatora kp należy nastawić na wartość minimalną a następnie zwiększać jego wartość, aż do chwili gdy w układzie pojawią się drgania o stałej amplitudzie. Należy odczytać wartość tego wzmocnienia kpkr zwanego wzmocnieniem krytycznym, przy którym wystąpiły drgania oraz okres tych drgań Tkr, zwany okresem krytycznym. Wg. reguł Zieglera-Nicholsa należy nastawić: dla regulatora PID dla regulatora PI dla regulatora P dla regulatora PI . dla regulatora P

14
h k t T0 tr 0,1k 0,9k Regulator P Regulator PI Regulator PID

Podobne prezentacje


















 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")
