Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
AUTOMATYKA i ROBOTYKA (wykład 10)
Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH

2
Układy nieliniowe Układy nieliniowe wykazują cztery właściwości znacznie różniące je od układów liniowych: nie spełniają zasady superpozycji, charakter odpowiedzi w stanie ustalonym w sposób istotny zależy od amplitudy sygnału sterującego lub am-plitudy zakłócenia, odpowiedź w stanie ustalonym oprócz częstotliwości pochodzącej od wymuszenia lub zakłócenia może dodat-kowo zawierać inne harmoniczne,

3
Układy nieliniowe stabilność układów w istotny sposób zależy od wartości warunków początkowych, przykładowo: dla małych wartości warunków początkowych układ może być stabilny, dla dużych wartości warunków początkowych układ może być niestabilny.

4
Reakcja układu liniowego na sumę sygnałów
Zasada superpozycji - przypomnienie Zasada superpozycji stosowana jest w analizie i syntezie liniowych układów regulacji. Brzmi ona następująco: Reakcja układu liniowego na sumę sygnałów jest równa sumie reakcji na każdy sygnał osobno.

5
Układy nieliniowe - przykład
Mamy trzy układy regulacji z jednostkowym sprzężeniem zwrotnym: 1) układ liniowy opisany funkcją przejścia toru głównego 2) układ nieliniowy zawierający człon liniowy opisany poniższą funkcją przejścia oraz człon o charakterystyce przekaźnika dwupołożeniowego
 układ liniowy opisany funkcją przejścia toru głównego. 2) układ nieliniowy zawierający człon liniowy opisany poniższą funkcją przejścia oraz człon o charakterystyce przekaźnika dwupołożeniowego.")
6
Układy nieliniowe - przyklad
3) układ nieliniowy zawierający człon liniowy opisany poniższą funkcją przejścia oraz człon o charakterystyce przekaźnika dwupołożeniowego
 układ nieliniowy zawierający człon liniowy opisany poniższą funkcją przejścia oraz człon o charakterystyce przekaźnika dwupołożeniowego.")
7
Schematy blokowe układów regulacji
Układy nieliniowe Schematy blokowe układów regulacji

8
Układy nieliniowe - przykład
Wszystkie układy poddano jednocześnie działaniu poniższych sygnałów skokowych: - sygnału w(t) = Aw·1(t), gdzie Aw = 1 i otrzymano wyniki jak na rysunku 1. - sygnału w(t) = Aw·1(t), gdzie Aw = 4 i otrzymano wyniki jak na rysunku 2.
 = Aw·1(t), gdzie Aw = 1 i otrzymano wyniki jak na rysunku 1. - sygnału w(t) = Aw·1(t), gdzie Aw = 4 i otrzymano wyniki jak na rysunku 2.")
9
Układy nieliniowe przykład
Rys. 1. Charakterystyki skokowe układów dla Aw = 1

10
Układy nieliniowe - przykład
Rys. 2. Charakterystyki skokowe układów dla Aw = 4

11
Układy nieliniowe - przykład
Wnioski : - układ 1 zachowuje się tak, że na podstawie charakte-rystyki dla Aw = 1 można wyznaczyć charakterystykę dla Aw = 4, - w przypadku układu 2 i 3 na podstawie charakterystyk dla Aw = 1 nie można wyznaczyć charakterystyk dla Aw = 4.

12
Układy nieliniowe – symbole graficzne
Symbole graficzne członów nieliniowych: a) symbol ogólny; b) charakterystyka dana wzorem; c) charakterystyka dana graficznie
 symbol ogólny; b) charakterystyka dana wzorem; c) charakterystyka dana graficznie.")
13
Układy nieliniowe Ogólnie odpowiedź y(t) członu nieliniowego jest związana z wymuszeniem u(t) tego członu nieliniowym równaniem różniczkowym n-tego rzędu gdzie:
 członu nieliniowego jest związana z wymuszeniem u(t) tego członu nieliniowym równaniem różniczkowym n-tego rzędu. gdzie:")
14
F(y,u,t) = 0 F(y,u) = 0 y = f(u) Układy nieliniowe
W przypadku szczególnym powyższe równanie może przyjąć postać algebraiczną przedstawiającą model nieautonomiczny F(y,u,t) = 0 Gdy czas nie występuje w postaci jawnej, to człon opisujemy równaniem autonomicznym, nazywanym charakterystyką statyczną F(y,u) = 0 którą zwykle staramy się przedstawić w postaci y = f(u)
 = 0. Gdy czas nie występuje w postaci jawnej, to człon opisujemy równaniem autonomicznym, nazywanym charakterystyką statyczną. F(y,u) = 0. którą zwykle staramy się przedstawić w postaci. y = f(u)")
15
Układy nieliniowe Ze względu na opis matematyczny charakterystyki statyczne członów nieliniowych dzielimy na dwie grupy: nieliniowości analityczne, czyli opisane w postaci jednoznacznej krzywej gładkiej lub rodziny krzywych. nieliniowości nieanalityczne, czyli opisane za pomocą krzywych nieciągłych lub niejednoznacznych. Ponadto wszystkie nieliniowości ze względu na sposób występowania w układzie dzielimy na: nieliniowości strukturalne, czyli wynikające z właściwości fizycznych członów, nieliniowości celowe, czyli specjalnie wprowadzone do układu dla zapewnienia pożądanych właściwości statycznych i dynamicznych.

16
Układy nieliniowe – wybrane charakterystyki statyczne
Do bardzo często spotykanych członów nieliniowych zaliczamy: człon ze strefą nieczułości, człon z nasyceniem, człon ze strefą nieczułości i nasyceniem, człon ze skokiem początkowym i nasyceniem, przekaźnik dwupołożeniowy bez histerezy, przekaźnik dwupołożeniowy z histerezą, przekaźnik trójpołożeniowy bez histerezy, przekaźnik trójpołożeniowy z histerezą.

17
Charakterystyka członu y = f(u)
Charakterystyki statyczne wybranych członów nieliniowych Nazwa członu Charakterystyka członu y = f(u) Człon ze strefą nieczułości Człon z nasyceniem
 Człon ze strefą nieczułości. Człon z nasyceniem.")
18
Charakterystyka członu y = f(u)
Charakterystyki statyczne wybranych członów nieliniowych Nazwa członu Charakterystyka członu y = f(u) Człon ze strefą nieczułości i nasyceniem Człon ze skokiem początkowym i nasyceniem
 Człon ze strefą nieczułości. i nasyceniem. Człon ze skokiem początkowym. i nasyceniem.")
19
Charakterystyka członu y = f(u)
Charakterystyki statyczne wybranych członów nieliniowych Nazwa członu Charakterystyka członu y = f(u) Przekaźnik dwupołożeniowy bez histerezy (idealny) Przekaźnik dwupołożeniowy z histerezą (rzeczywisty)
 Przekaźnik dwupołożeniowy bez histerezy (idealny) Przekaźnik dwupołożeniowy z histerezą (rzeczywisty)")
20
Charakterystyka członu y = f(u)
Charakterystyki statyczne wybranych członów nieliniowych Nazwa członu Charakterystyka członu y = f(u) Przekaźnik trójpołożeniowy bez histerezy (idealny) Przekaźnik trójpołożeniowy z histerezą (rzeczywisty)
 Przekaźnik trójpołożeniowy bez histerezy (idealny) Przekaźnik trójpołożeniowy z histerezą (rzeczywisty)")
21
Wybrane schematy zastępcze członów przekaźnikowych
Dla charakterystyki przekaźnika dwupołożeniowego z histerezą konstruujemy schemat zastępczy zawierający charakterystykę przekaźnika idealnego i obwód sprzężenia zwrotnego jak na rysunku poniżej.

22
Wybrane schematy zastępcze członów przekaźnikowych
Dana jest charakterystyka przekaźnika trójpołożeniowego z histerezą oraz charakterystyka przekaźnika idealnego przechodząca przez środek pola histerezy.

23
Wybrane schematy zastępcze członów przekaźnikowych
Schemat zastępczy przekaźnika trójpołożeniowego z histerezą.

24
Przekształcanie schematów blokowych
Schematy blokowe układów z członami nieliniowymi można przekształcać podobnie jak schematy układów liniowych. Obowiązuje przy tym warunek konieczny i dostateczny prze-kształcenia: Zastąpienie części schematu układem równoważnym nie może powodować zmian w pozostałych częściach schematu nie podlegającym przekształceniu. Stąd wynika podstawowa zasada przekształcania: Kolejność występowania członów nieliniowych ma istotne znaczenie dla właściwości układu i nie wolno jej zmieniać.

25
Przekształcanie schematów blokowych
Dopuszczalne przekształcenia schematów blokowych: szeregowe połączenie członów, równoległe połączenie członów, przenoszenie węzła zaczepowego.

26
Przekształcanie schematów blokowych
Rozważamy fragment układu złożony z dwóch członów nieliniowych o znanych charakterystykach statycznych połączonych szeregowo: Dwa człony nieliniowe połączone szeregowo. Człon zastępczy równoważny układowi z rysunku obok. Po podstawieniu charakterystyki pierwszego członu do charakterystyki drugiego członu otrzymujemy y = f2(u1) = f2[f1(u)] = f(u)
 = f2[f1(u)] = f(u)")
27
Przekształcanie schematów blokowych
Równoległe połączenie członów Człon zastępczy równoważny układowi ze schematu obok Dwa człony nieliniowe połączone równolegle Z istoty połączenia równoległego wynika, że charakterystyka członu zastępczego jest równa sumie charakterystyk członów składowych y = y1 + y2 = f1(u) + f2(u) = f(u)
 + f2(u) = f(u)")
28
Przekształcanie schematów blokowych
Graficzne wyznaczanie charakterystyki członu zastępczego dla członów nieliniowych połączonych równolegle

29
Przekształcanie schematów blokowych – przykład1
Wyznaczyć charakterystykę członu zastępczego dla podanego niżej równoległego połączenia członów o znanych charakterystykach statycznych. Dwa człony nieliniowe połączone równolegle

30
Przekształcanie schematów blokowych – przykład1
Rozwiązaniem jest charakterystyka pokazana na rysunku. Charakterystyka wypadkowa jest liniowa lub zbliżona do liniowej. Charakterystyki dla podanych układów

31
Przekształcanie schematów blokowych – przykład2
Wyznaczyć charakterystykę członu o zmiennym wzmocnieniu, utwo-rzonego z: 1) członu liniowego opisanego wzmocnieniem K1 = 0.5, 2) członu nieliniowego ze strefą nieczułości o szerokości 2a = 1, poza tą strefą opisanego wzmocnieniem K2 = 2. Schemat członu o zmiennym wzmocnieniu
 członu liniowego opisanego wzmocnieniem K1 = 0.5, 2) członu nieliniowego ze strefą nieczułości o szerokości 2a = 1, poza tą strefą opisanego wzmocnieniem K2 = 2. Schemat członu o zmiennym wzmocnieniu.")
32
Przekształcanie schematów blokowych – przykład2
Charakterystyka statyczna członu

33
Przenoszenie węzła zaczepowego przed blok
Przeniesienie węzła zaczepowego przed blok nieliniowy zgodnie z warunkiem koniecznym i dostatecznym wymaga wprowadzenia dodatkowego członu nieliniowego takiego, jak człon dany. Otrzymamy wtedy schemat pokazany poniżej na rysunku. Schemat blokowy z węzłem zaczepowym za blokiem Przekształcony schemat z rysunku obok

34
Przenoszenie węzła zaczepowego za blok
Przeniesienie węzła zaczepowego za blok nieliniowy zgodnie z warunkiem koniecznym i dostatecznym wymaga wprowadzenia dodatkowego członu nieliniowego o cha-rakterystyce odwrotnej do charakterystyki danej. Schemat blokowy z węzłem zaczepowym przed blokiem Przekształcony schemat z rysunku obok

35
Układy regulacji dwupołożeniowej
umax -h h r y(t) u(t) + - Uwagi wstępne: Typowy przykład zastosowań to regulacja temperatury, Przebiegi wielkości regulowanej w układzie zależą nie tylko od własności regulatora, lecz także od własności obiektu. Jako regulator można stosować przekaźnik o charakterystyce asymetrycznej. Ze statycznym obiektem regulacji
 u(t) + - Uwagi wstępne: Typowy przykład zastosowań to regulacja temperatury, Przebiegi wielkości regulowanej w układzie zależą nie tylko od własności regulatora, lecz także od własności obiektu. Jako regulator można stosować przekaźnik o charakterystyce asymetrycznej. Ze statycznym obiektem regulacji.")
36
Układy regulacji dwupołożeniowej
Przebiegi odpowiedzi skokowej obiektu na sterowanie umin oraz umax: y(t) ymax ymin UWAGA! W przypadku obiektów cieplnych stała czasowa i czas martwy mają różne wartości dla grzania i chłodzenia! ( zob. wykres powyżej)
 ymax. ymin. UWAGA! W przypadku obiektów cieplnych stała czasowa i czas martwy mają różne wartości dla grzania i chłodzenia! ( zob. wykres powyżej)")
37
Układy regulacji dwupołożeniowej
Przebiegi czasowe wielkości regulowanej i sygnału sterowania w układzie: 50 100 150 200 250 300 0.5 1 1.5 2 2.5 3 3.5 4 5 6 7 8 9 10 2h r

38
Układy regulacji dwupołożeniowej
Uwagi do wykresów: W układzie występują oscylacje wielkości regulowanej i nie da się ich uniknąć. Zwiększenie amplitudy oscylacji powoduje zmniejszenie częstotliwości przełączeń, Rozszerzenie szerokości histerezy h powoduje zwiększenie amplitudy oscylacji, Im większy wartość czasu martwego obiektu , tym większa amplituda oscylacji w układzie, im większa wartość stałęj czasowej obiektu, tym mniejsza częstotliwość przełączeń.

39
Przebiegi wielkości regulowanej w układzie regulacji II położeniowej dla różnych poziomów wartości zadanej ( obiekty statyczne) 1. Wysoki poziom wartości zadanej: r bliska wartości ymax : 50 100 150 200 250 300 1 2 3 4 5 6 yśr yśr < r

40
Przebiegi wielkości regulowanej w układzie regulacji II położeniowej dla różnych poziomów wartości zadanej ( obiekty statyczne) 2. Wartość zadana na poziomie ok. 50% zakresu 50 100 150 200 250 300 1 2 3 4 5 6 yśr yśr ≈ r

41
Przebiegi wielkości regulowanej w układzie regulacji II położeniowej dla różnych poziomów wartości zadanej ( obiekty statyczne) 3. Niski poziom wartości zadanej: r bliska wartości ymin : 50 100 150 200 250 300 1 2 3 4 5 6 yśr yśr > r

42
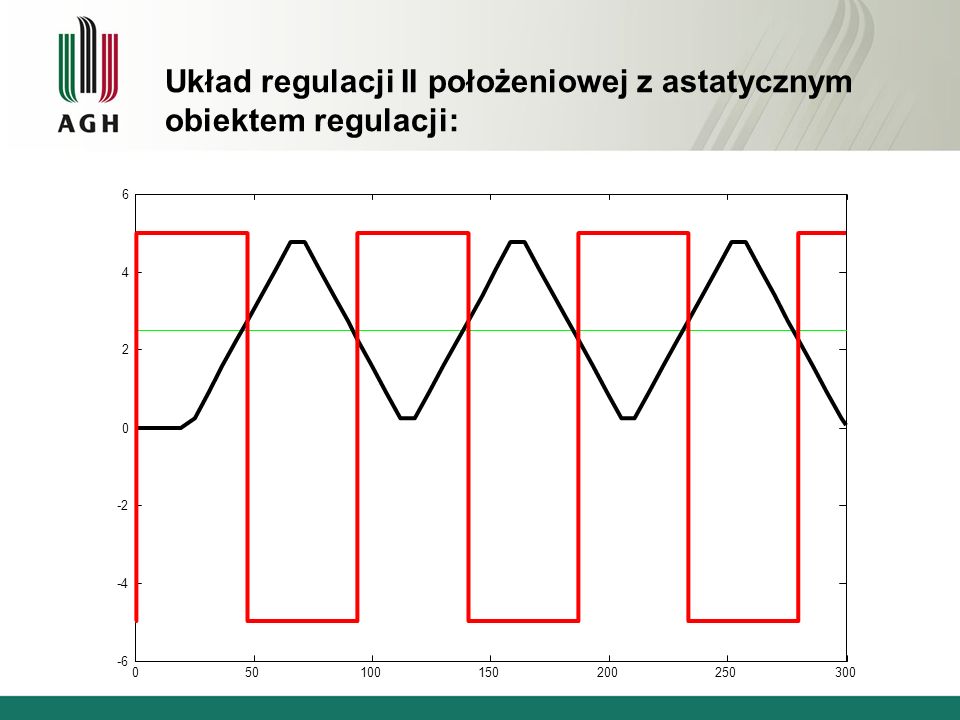
Układ regulacji II położeniowej z astatycznym obiektem regulacji:
umax -h h r y(t) u(t) + - Uwagi wstępne: Przebiegi wielkości regulowanej w układzie zależą nie tylko od własności regulatora, lecz także od własności obiektu. Jako regulator należy zastosować przekaźnik o charakterystyce symetrycznej. Wartość średnia wielkości regulowanej nie zależy od poziomu wartości zadanej.
 u(t) + - Uwagi wstępne: Przebiegi wielkości regulowanej w układzie zależą nie tylko od własności regulatora, lecz także od własności obiektu. Jako regulator należy zastosować przekaźnik o charakterystyce symetrycznej. Wartość średnia wielkości regulowanej nie zależy od poziomu wartości zadanej.")
43
Układ regulacji II położeniowej z astatycznym obiektem regulacji:
50 100 150 200 250 300 -6 -4 -2 2 4 6
44
Metoda funkcji opisującej.
Uwagi wstępne: Metoda funkcji opisującej stanowi rozszerzenie metod opisu systemów liniowych w dziedzinie częstotliwości, Po podaniu sygnału sinusoidalnego na wejście elementu nieliniowego na wyjściu elementu pojawia się sygnał okresowy, ale nie sinusoidalny. Kształt sygnału wyjściowego zależy od rodzaju nieliniowości oraz od amplitudy sygnału wejściowego. Idea metody funkcji opisującej polega na założeniu, że kształt przebiegu wyjściowego można w przybliżeniu opisać za pomocą jego pierwszej harmonicznej.

45
Przejście sygnału sinusoidalnego przez element III położeniowy - przykład:
ym -ym Charakterystyka symetryczna, Bez histerezy,

46
Metoda funkcji opisującej.
Na element podajemy sygnał sinusoidalny o amplitudzie A1 większej od strefy nieczułości elementu 2n: u(t) ym y(t)= Φ(u(t)) -n A1 n -ym u(t)=A1sin t A1 > 2n
 ym. y(t)= Φ(u(t)) -n. A1. n. -ym. u(t)=A1sin t. A1 > 2n.")
47
Metoda funkcji opisującej.
u(t) 1 2 3 4 5 6 7 8 9 10 -2 -1.5 -1 -0.5 0.5 1.5 ym n y(t) -n -ym
 ym. n. y(t) -n. -ym.")
48
Metoda funkcji opisującej.
Definicja Funkcją opisującą elementu nieliniowego nazywamy stosunek wartości zespolonej amplitudy pierwszej harmonicznej sygnału wyjściowego A(Y1h) do amplitudy sinusoidalnego sygnału wejściowego A1 Dla elementów nieliniowych bezinercyjnych o symetrycznych charakterystykach statycznych:
 do amplitudy sinusoidalnego sygnału wejściowego A1. Dla elementów nieliniowych bezinercyjnych o symetrycznych charakterystykach statycznych:")
49
Metoda funkcji opisującej.
Definicja Wykres krytyczny elementu nieliniowego: Wykres krytyczny wyznacza się przy A1 zmieniającej się w zakresie od 0 do ∞.

50
Funkcje opisujące typowych elementów nieliniowych
Przekaźnik II położeniowy bez histerezy: u y ym -ym Q P Wykres krytyczny: A1 -> A1 =0

51
Funkcje opisujące typowych elementów nieliniowych
ym -ym -h h Przekaźnik II położeniowy z histerezą: A1<h J(A1)= 0 A1>h:
= 0. A1>h:")
52
Funkcje opisujące typowych elementów nieliniowych
Wykres krytyczny: Q P A1 -> A1 =h

53
Przekaźnik III położeniowy bez histerezy:
Funkcje opisujące typowych elementów nieliniowych y u -n n ym -ym Przekaźnik III położeniowy bez histerezy: A1<n J(A1)= 0 A1>n:
= 0. A1>n:")
54
Funkcje opisujące typowych elementów nieliniowych
Wykres krytyczny: Q A1 =0 P A1 ->

55
y u A1<n J(A1)= 0 A1>n:
Funkcje opisujące typowych elementów nieliniowych y u -n n ym -ym -an an A1>n: A1<n J(A1)= 0 Przekaźnik III położeniowy z histerezą:
= 0. Przekaźnik III położeniowy z histerezą:")
56
Funkcje opisujące typowych elementów nieliniowych
Wykres krytyczny: Q P A1 -> A1 =a n

57
A1<n J(A1)=k Funkcje opisujące typowych elementów nieliniowych y
Element z nasyceniem: ym Arc tg = k -n n u A1<n J(A1)=k -ym
=k. -ym.")
58
Funkcje opisujące typowych elementów nieliniowych
Wykres krytyczny: Q A1 -> P -1/k

59
A1<n J(A1)=0 Funkcje opisujące typowych elementów nieliniowych
Element ze strefą nieczułości: u y n -n Arc tg = k A1<n J(A1)=0
=0.")
60
Funkcje opisujące typowych elementów nieliniowych
Wykres krytyczny: Q A1 =0 A1 -> P -1/k

61
G(jω) J(A1) Go(A1, jω)=J(A1)G(jω)
Stabilność układu regulacji z regulatorem nieliniowym i liniowym obiektem regulacji. Kryterium Nyquista dla systemów nieliniowych. J(A1) r y(t) u(t) + - G(jω) Uogólniona transmitancja widmowa układu otwartego jest równa: Go(A1, jω)=J(A1)G(jω)
 r. y(t) u(t) + - G(jω) Uogólniona transmitancja widmowa układu otwartego jest równa: Go(A1, jω)=J(A1)G(jω)")
62
Granica stabilności wg kryterium Nyquista:
Uwaga Wykres krytyczny w przypadku układu nieliniowego jest odpowiednikiem punktu (-1,j0) w przypadku układu liniowego.
 w przypadku układu liniowego.")
63
Przybliżony warunek stabilności (Kryterium Nyquista dla systemu nieliniowego )
Jeżeli układ otwarty jest stabilny i charakterystyka amplitudowo – fazowa liniowej części układu nie okrąża wykresu krytycznego elementu nieliniowego ani nie ma z nim punktów wspólnych, to układ zamknięty jest globalnie stabilny. Uwagi. Jeżeli pewna część wykresu krytycznego jest okrążana przez charakterystykę G(jω), to punkt przecięcia obu wykresów określa amplitudę i pulsację drgań ustalonych występujących w układzie ( cyklu granicznego ) Część wykresu krytycznego okrążana przez G(j) opisuje niestabilną część systemu, a część nie okrążana opisuje część stabilną.
, to punkt przecięcia obu wykresów określa amplitudę i pulsację drgań ustalonych występujących w układzie ( cyklu granicznego ) Część wykresu krytycznego okrążana przez G(j) opisuje niestabilną część systemu, a część nie okrążana opisuje część stabilną.")
64
G(jω) J(A1) Przykład 1 r + y(t) -
u(t) + - G(jω) Liniowy obiekt regulacji opisany jest następująco:
 + - G(jω) Liniowy obiekt regulacji opisany jest następująco:")
65
Dla jakiej wartości k układ będzie stabilny globalnie?
Obiekt jest sterowany nieliniowym regulatorem P o następującej charakterystyce: u y 5 -5 n -n Arc tg = k Problem: Dla jakiej wartości k układ będzie stabilny globalnie?

66
Układ będzie stabilny globalnie dla k < 8
Pm() Qm() 1 1/3 -3/8 3 -1/8 Przykład 1 cd. -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 Real Axis -1/8 P Q G(jω) -1/k K(A1) Układ będzie stabilny globalnie dla k < 8
 Qm() 1. 1/3. -3/8. 3. -1/8. Przykład 1 cd Real Axis. -1/8. P. Q. G(jω) -1/k. K(A1) Układ będzie stabilny globalnie dla k < 8.")
67
G(jω) J(A1) Przykład 2 r + y(t) -
u(t) + - G(jω) Rozważamy obiekt regulacji z poprzedniego przykładu:
 + - G(jω) Rozważamy obiekt regulacji z poprzedniego przykładu:")
68
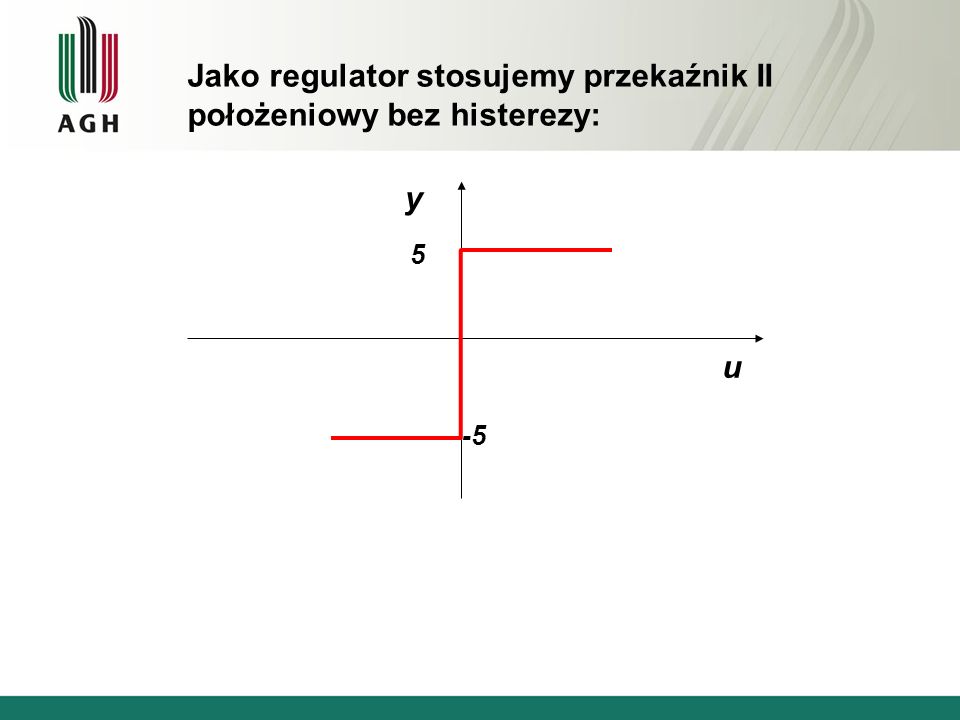
Jako regulator stosujemy przekaźnik II położeniowy bez histerezy:
5 -5
69
Przykład 2 cd. Uwagi: Układ nie będzie stabilny, gdyż dla każdej wartości ym charakterystyka G(jω) będzie przecinała wykres krytyczny regulatora. Układ będzie na granicy stabilności i punkt przecięcia wykresu krytycznego z wykresem G(jω) określa amplitudę i pulsację drgań ustalonych. W rozważanym przypadku:
 określa amplitudę i pulsację drgań ustalonych. W rozważanym przypadku:")
70
Przykład 2 cd. Q K(A1) P G(jω) -1/8 -3/8 Pm() Qm() 1 1/3 -3/8
1 1/3 -3/8 3 -1/8 Przykład 2 cd. -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 Real Axis -1/8 P Q G(jω) K(A1) -3/8
 K(A1) -3/8.")
71
G(jω) J(A1) Przykład 3 r + y(t) -
u(t) + - G(jω) Rozważamy obiekt regulacji z poprzedniego przykładu:
 + - G(jω) Rozważamy obiekt regulacji z poprzedniego przykładu:")
72
Jako regulator stosujemy przekaźnik II położeniowy z histerezą o szerokości h:
5 -5 -h h Dla jakiej szerokości strefy histerezy h zamknięty układ regulacji będzie globalnie stabilny?

73
Pm() Qm() 1 1/3 -3/8 3 -1/8 Na podstawie poniższego wykresu widać, ch-ka obiektu nie przetnie wykresu krytycznego jeżeli: -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 Real Axis -1/8 P Q G(jω) K(A1) -3/8 -h/4ym Jeżeli ym= 5, to ostatecznie:
 K(A1) -3/8. -h/4ym. Jeżeli ym= 5, to ostatecznie:")
Podobne prezentacje













 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")
>")
>")

>")