Pobierz prezentację
1
GEODEZJA WYKŁAD Pomiary szczegółowe Katedra Geodezji im. K. Weigla ul. Poznańska 2/34

2
Podział prac geodezyjnych i kartograficznych Prace geodezyjne i kartograficzne dzielą się (wg normy) na: 1. pomiary i opracowania geodezyjne osnów geodezyjnych, osnów grawimetrycznych i magnetycznych, 2. pomiary szczegółowe sytuacyjne i wysokościowe, 3. pomiary realizacyjne i kontrolne, 4. pomiary związane z katastrem nieruchomości (ewidencją gruntów, budynków i lokali), 5. inne pomiary i opracowania geodezyjne i kartograficzne, (opracowanie planów zagospodarowania przestrzennego, miernictwo górnicze, badania naukowe).
, 5. inne pomiary i opracowania geodezyjne i kartograficzne, (opracowanie planów zagospodarowania przestrzennego, miernictwo górnicze, badania naukowe)..")
3
Jednostki miary w geodezji: 1. Długości i wysokości: 1 m = 100 cm = 1000 mm 1 m = 0.01 hm = 0.001 km 1 mkm = 0.001 mm (mkm – mikrometr) 1 km = 10 hm = 1000 m (hm – hektometr) 1 cal (inch) [", in] = 2,54 cm 1 stopa (foot) [ft] = 12" 1 jard (yard) [yd] = 3 ft 1 mila morska (nautical mile) [NM, nmi] = 1852 m mila morska = 1 ’ ( kąt środkowy ) łuku południka Ziemi
 1 km = 10 hm = 1000 m (hm – hektometr) 1 cal (inch) [ , in] = 2,54 cm 1 stopa (foot) [ft] = 12 1 jard (yard) [yd] = 3 ft 1 mila morska (nautical mile) [NM, nmi] = 1852 m mila morska = 1 ’ ( kąt środkowy ) łuku południka Ziemi.")
4
Jednostki miary 2. Kątów (poziomych i pionowych): LEGALNA wg układu SI: 1 RADIAN = kąt środkowy oparty na łuku okręgu o długości równej promieniowi. DOPUSZCZONE: Stopniowa i gradowa 2π rad = 360 o = 400 g 1 rad = 360 o /2π = 400 g /2π 1 rad = 57.295780 o = 57 o 17 ’ 44 ”.8 1 rad = 63.661977 g = 63 g 66 c 19. cc 77
: LEGALNA wg układu SI: 1 RADIAN = kąt środkowy oparty na łuku okręgu o długości równej promieniowi. DOPUSZCZONE: Stopniowa i gradowa 2π rad = 360 o = 400 g 1 rad = 360 o /2π = 400 g /2π 1 rad = o = 57 o 17 ’ rad = g = 63 g 66 c 19. cc 77.")
5
Jednostki miary kąta Przeliczanie: 360 o = 400 g 400 g = 360 o 1 o = 400 g /360 = 1.11111(1) g 1 g = 360 o /400 = 0.9 o (grad) 1 o = 60’ = 3600” 1 g = 100 c = 10000 cc 1’ = 60” 1 c = 100 cc (centigrad) 1’ = 1 c 85.(185) cc 1 c = 32.4 ” 1” = 3.086 cc (centi-centigrad)
 g 1 g = 360 o /400 = 0.9 o (grad) 1 o = 60’ = g = 100 c = cc 1’ = 60 1 c = 100 cc (centigrad) 1’ = 1 c 85.(185) cc 1 c = = cc (centi-centigrad)")
6
Jednostki miary 3. Jednostki miary pola: 1 m 2 = 10000 cm 2 1 a = 100 m 2 (1a - ar) 1 ha = 100 a = 10000 m 2 (1ha - hektar) 1 km 2 = 100 ha = 1000 000 m 2
 1 ha = 100 a = m 2 (1ha - hektar) 1 km 2 = 100 ha = m 2.")
7
Podstawowe zadania geodezji: 1. pomiary wzajemnego położenia na powierzchni Ziemi punktów obiektów usytuowanych na tej powierzchni, (inwentaryzacyjne). 2. pomiary niezbędne do sporządzania map, (inwentaryzacyjne). 3. pomiary dla wskazania położenia punktów projektowanych budowli inżynierskich (realizacyjne). 4. kontrola realizacji zadań budowlanych (pomiary kontrolne). 5. pomiary niezbędne dla określenie zmian położenia punktów obiektów i urządzeń oraz punktów powierzchni terenu (pomiary przemieszczeń i odkształceń). Każde zadanie geodezyjne związane z pomiarami powinno być oparte na osnowie geodezyjnej (bazie pomiarów).
. 2. pomiary niezbędne do sporządzania map, (inwentaryzacyjne). 3. pomiary dla wskazania położenia punktów projektowanych budowli inżynierskich (realizacyjne). 4. kontrola realizacji zadań budowlanych (pomiary kontrolne). 5. pomiary niezbędne dla określenie zmian położenia punktów obiektów i urządzeń oraz punktów powierzchni terenu (pomiary przemieszczeń i odkształceń). Każde zadanie geodezyjne związane z pomiarami powinno być oparte na osnowie geodezyjnej (bazie pomiarów)..")
8
Pomiary i opracowania szczegółowe Są to pomiary wykonywane bezpośrednio lub pośrednio które obejmują: 1.założenie, pomiar i obliczenie geodezyjnych osnów pomiarowych sytuacyjnych i wysokościowych, 2.pomiary sytuacyjne, w tym pomiary: -stanu zagospodarowania terenu, -zabudowy, ogrodzeń, komunikacji, uzbrojenia terenu w urządzenia techniczne nadziemne, naziemne i podziemne, -innych obiektów systemu informacji o terenie. 3. pomiary wysokościowe (rzeźby terenu), naturalnych i sztucznych form ukształtowania powierzchni terenu,
, naturalnych i sztucznych form ukształtowania powierzchni terenu,.")
9
Pomiary i opracowania szczegółowe 4. Opracowaniea dla potrzeb systemu informacji o terenie (SIT, GIS), w tym opracowania kartograficzne i budowa numerycznych modeli terenu, 5. Tworzenie i udostępnianie baz danych o obiektach systemu informacji o terenie. Osnowy geodezyjne Osnowę geodezyjną (bazę pomiarów) stanowią punkty oznaczone w terenie trwałymi znakami geodezyjnymi, których wzajemne położenie określają współrzędne geodezyjne w przyjętym układzie odniesienia.
, w tym opracowania kartograficzne i budowa numerycznych modeli terenu, 5. Tworzenie i udostępnianie baz danych o obiektach systemu informacji o terenie. Osnowy geodezyjne Osnowę geodezyjną (bazę pomiarów) stanowią punkty oznaczone w terenie trwałymi znakami geodezyjnymi, których wzajemne położenie określają współrzędne geodezyjne w przyjętym układzie odniesienia..")
10
Ogólny podział osnów geodezyjnych: 1. pozioma – punkty posiadające współrzędne {X,Y} 2. wysokościowa – współrzędne {H} (wysokości określone względem przyjętego poziomu odniesienia). Ze względu na znaczenie osnowy dla zadań geodezyjnych: - podstawowe (do nawiązania osnów szczegółowych), - szczegółowe (do nawiązania osnów pomiarowych oraz numerycznych modeli terenu i zdjęć fotogrametrycznych dla państwowego systemu odniesień przestrzennych), - pomiarowe (do oparcia pomiarów i wyznaczeń szczegółowych, realizacyjnych, katastralnych i innych).
. Ze względu na znaczenie osnowy dla zadań geodezyjnych: - podstawowe (do nawiązania osnów szczegółowych), - szczegółowe (do nawiązania osnów pomiarowych oraz numerycznych modeli terenu i zdjęć fotogrametrycznych dla państwowego systemu odniesień przestrzennych), - pomiarowe (do oparcia pomiarów i wyznaczeń szczegółowych, realizacyjnych, katastralnych i innych)..")
11
Klasyfikacja poziomej osnowy geodezyjnej - podstawowa i szczegółowa osnowa pozioma: I,II i III klasy. - punkty osnowy pomiarowej nie są dzielone na klasy. Podstawowa osnowa pozioma I klasy: a) sieć geodezyjna pomierzona techniką GPS, (część europejskiej sieci EUREF na terenie Polski - EUREF- POL), b) sieć POLREF stanowiąca zagęszczenie sieci EUREF-POL, c) punkty dawnej sieci astronomiczno-geodezyjnej i wypełniającej. Miarą dokładności osnowy podstawowej jest błąd położenia punktu 0.05 m. Szczegółowa osnowa pozioma to punkty II i III klasy, dla których średni błąd położenia względem wyższych klas wynosi odpowiednio 0.03 m i 0.05 m.
 sieć geodezyjna pomierzona techniką GPS, (część europejskiej sieci EUREF na terenie Polski - EUREF- POL), b) sieć POLREF stanowiąca zagęszczenie sieci EUREF-POL, c) punkty dawnej sieci astronomiczno-geodezyjnej i wypełniającej. Miarą dokładności osnowy podstawowej jest błąd położenia punktu 0.05 m. Szczegółowa osnowa pozioma to punkty II i III klasy, dla których średni błąd położenia względem wyższych klas wynosi odpowiednio 0.03 m i 0.05 m..")
12
Klasyfikacja wysokościowej osnowy geodezyjnej Podstawowa i szczegółowa geodezyjna osnowa wysokościowa dzieli się na cztery klasy I,II,III i IV. Punkty osnowy pomiarowej nie są dzielone na klasy. Podstawowa geodezyjna osnowa wysokościowa składa się z punktów niwelacji precyzyjnej I i II klasy (błąd 1 i 2 mm/km). Do klasy III i IV należą punkty szczegółowej osnowy wysokościowej (błąd 4 mm i 10 mm/km). Wysokościowa osnowa pomiarowa charakteryzuje się błędem nie większy niż 20 mm/km. Wysokościowa, a także pozioma osnowa pomiarowa jest zbiorem punktów, których błąd położenia (współrzędnych) względem osnów wyższych klas < 0.10 m.
. Do klasy III i IV należą punkty szczegółowej osnowy wysokościowej (błąd 4 mm i 10 mm/km). Wysokościowa osnowa pomiarowa charakteryzuje się błędem nie większy niż 20 mm/km. Wysokościowa, a także pozioma osnowa pomiarowa jest zbiorem punktów, których błąd położenia (współrzędnych) względem osnów wyższych klas < 0.10 m..")
13
Cechy geodezyjnych osnów wysokościowych. Klasa i nazwa sieci Punkty nawiązania śr. długość linii niwelacji śr. odległość punktów śr. bł. niwelacji mm I precyzyjna-50 km-1 II precyzyjnaI kl25 km8 km2 III szczegółowaI-II kl18 km6 km4 IV szczegółowaI-III kl-2 km10 pomiarowaII-IV kl--20

14
Zakładanie i uzupełnianie osnów geodezyjnych 1.Metody klasyczne (geometryczne), 2.Metody fotogrametryczne (teledetekcja), 3.Metody oparte na technikach satelitarnych GPS. Metody klasyczne wykorzystują łączenie punktów w sieci: triangulacyjne i poligonowe lub dowolnie powiązane w formy figur geometrycznych np. wcięcia punktów, sieci modularne. Elementem sieci może być: linia pomiarowa, trójkąt, czworobok geodezyjny, ciąg poligonowy. Ciągi poligonowe – lokalne i nawiązane. Ciągi zamknięte, dwustronnie i jednostronnie nawiązane. Orientację w sieci zapewniają współrzędne punktów i azymuty boków sieci.

15
Znaki geodezyjne Typowe znaki geodezyjne 70 cm 16 cm Płyta betonowa Stabilizacja podwójna znakiem betonowym z rurką Głowica metalowa Znak pomiarowy stalowy Słup żelbetowy

16
Znaki geodezyjne

17
Repery – wskaźniki osnowy wysokościowej

18
Reper ziemny

19
Reper ziemny – widok z góry

20
Znaki do stabilizacji punktów osnowy pomiarowej kamienne Znaki geodezyjne - znaki z trwałego materiału, określające położenie punktów osnowy geodezyjnej. Inwestor jest zobowiązany chronić znaki geodezyjne sieci pomiarowych znajdujące się na terenie budowy przed zniszczeniem. W przypadku potrzeby przesunięcia lub usunięcia znaku należy o tym powiadomić Wydział Geodezji.

21
Opis topograficzny punktu osnowy Punkty, na których będzie oparty pomiar, należy utrwalić znakami geodezyjnymi i sporządzić dla nich opisy topograficzne w nawiązaniu do trwałych szczegółów sytuacyjnych.

22
Opis topograficzny punktu osnowy wysokościowej

23
Definicje azymutu astronomicznego, magnetycznego i topograficznego A m =A a + AaAa A t = A a - A a - astronomiczny, A m – magnetyczny, A t - topograficzny, - deklinacja magnetyczna - zbieżność południków

24
A AB A BA A AB = A AB + X Azymut odwrotny: A BA = A AB +180 o Azymut odcinka (topograficzny)
")
25
Zakładanie i uzupełnianie osnów geodezyjnych cd. Azymut w układzie współrzędnych to kąt poziomy (analogia do kąta kierunkowego w geometrii E2) zawarty między kierunkiem osi OX i kierunkiem danego odcinka, liczony zgodnie z ruchem wskazówek zegara {0;360 o }. A i,k = arc tg( Y i,k / X i,k ) + R R – składnik redukcji zależny od ćwiartki układu współrzędnych: (I R=0; II R= ; III R = ; IV R=2 ). I ( X 0, Y 0); II ( X <0, Y 0); III ( X 0, Y 0); X k = X i + X i,k = X i + d i,k *cos(A i,k ) Y k = Y i + Y i,k = Y i + d i,k *sin(A i,k )
 zawarty między kierunkiem osi OX i kierunkiem danego odcinka, liczony zgodnie z ruchem wskazówek zegara {0;360 o }. A i,k = arc tg( Y i,k / X i,k ) + R R – składnik redukcji zależny od ćwiartki układu współrzędnych: (I R=0; II R= ; III R = ; IV R=2 ). I ( X 0, Y 0); II ( X <0, Y 0); III ( X 0, Y 0); X k = X i + X i,k = X i + d i,k *cos(A i,k ) Y k = Y i + Y i,k = Y i + d i,k *sin(A i,k ).")
26
wcięcie kątowo-liniowe wcięcie kątowe linie pomiarowe ciąg jednostronnie nawiązany w pkt C C A B F G A,B-baza wcięcia Sieć geodezyjna utworzona z powiązania punktów osnowy.

27
- Kąty lewe, - kąty prawe, A,B – punkty nawiązania Kierunek ciągu Ciąg poligonowy nawiązany A K = A P + i - n 180 o A K = A P - γ i + n 180 o

28
Pomiary sytuacyjne i wysokościowe Pomiar sytuacyjny to zespół czynności geodezyjnych pozwalających na określenie kształtu, wielkości i wzajemnego położenia szczegółów terenowych. W geodezji inżynieryjnej każdy obiekt powierzchni Ziemi jest traktowany jako bryła lub figura geometryczna o n wierzchołkach. Figury te są poddawane generalizacji kształtu w stopniu zależnym od celu prowadzonych pomiarów. Najczęściej w pierwszym etapie dokonuje się rzutowania punktów na geoidę (powierzchnię odniesienia). Pomiar wysokościowy to czynności geodezyjne pozwalające na określenie wysokości punktów względem przyjętego poziomu odniesienia i do przedstawienia form ukształtowania terenu.
. Pomiar wysokościowy to czynności geodezyjne pozwalające na określenie wysokości punktów względem przyjętego poziomu odniesienia i do przedstawienia form ukształtowania terenu..")
29
Obiekty terenowe w pomiarach sytuacyjnych Norma wyróżnia 3 grupy szczegółów terenowych: 1) I grupa dokładności: - stabilizowane znakami punkty osnowy geodezyjnej. - znaki graniczne, granice działek i punkty załamania granic. - obiekty i urządzenia techniczno-gospodarcze. - elementy naziemne uzbrojenia terenu i studnie - obiekty drogowe i kolejowe, szczegóły ulic. 2) II grupa: - punkty załamania konturów budowli i urządzeń poziemnych - boiska sportowe, parki, drzewa - elementy podziemne uzbrojenia terenu 3) III grupa: - punkty załamania konturów użytków gruntowych i klasyfikacyjnych. - złamania dróg dojazdowych, linie brzegowe wód. - inne obiekty o niewyraźnych konturach.
 II grupa: - punkty załamania konturów budowli i urządzeń poziemnych - boiska sportowe, parki, drzewa - elementy podziemne uzbrojenia terenu 3) III grupa: - punkty załamania konturów użytków gruntowych i klasyfikacyjnych. - złamania dróg dojazdowych, linie brzegowe wód. - inne obiekty o niewyraźnych konturach..")
30
Dokładność pomiarów wynikająca z generalizacji kształtu. Pomiar sytuacyjny powinien być wykonywany tak aby błąd położenia punktów mierzonych obiektów nie przekroczył 0.10 m, 0.30 m i 0.50 m dla kolejnych grup szczegółów. Pomiar wysokościowy powinien być wykonywany z błędem nie przekraczającym odpowiednio: 1mm, 5mm i 10 mm dla odpowiednich grup.

31
Metody pomiaru szczegółów terenowych: 1.Biegunowa polega na pomiarze odległości od stanowiska instrumentu do punktu celowania i kierunku (kąta) przy pomocy teodolitu lub stacji pomiarowej, 2.Domiarów prostokątnych (ortogonalna), polega na pomiarze rzędnej i odciętej mierzonego punktu sytuacyjnego względem linii, na którą rzutuje się dany punkt przy użyciu przyrządów geodezyjnych (węgielnica). 3.Przecięć kierunków. W tej metodzie rejestruje się miary w miejscach przecięcia konturu sytuacyjnego z linią pomiarową. Można zaprojektować specjalny układ linii pomiarowych tak by zdjąć dużą ilość punktów przecięcia 4.Przedłużeń polega na przedłużaniu konturu sytuacyjnego do przecięcia się z linią pomiarową. Linia pomiarowa na którą przedłuża się mierzone kontury sytuacyjne powinna być zlokalizowana

32
5. Wcięć kątowych i liniowych, - wcięcie kątowe polega na wyznaczeniu położenia punktu na podstawie pomierzonych kątów w stosunku do punktów o znanym położeniu (bazy wcięcia). W punktach bazy mierzy się kąty poziome, - wcięcie liniowe polega na wyznaczeniu położenia punktu na podstawie pomierzonych odległości między wyznaczanym punktem, a punktami o znanych współrzędnych (bazy wcięcia), - wcięcie kątowo - liniowe jest to takie wcięcie, w którym dla określenia położenia punktu podlegają pomiarowi kąty i odległości w punktach bazy wcięcia. 6. Fotogrametrii naziemnej polega na przetworzeniu danych zarejestrowanych na zdjęciach fotograficznych kamerą fotogrametryczną na punktach osnowy geodezyjnej.
. W punktach bazy mierzy się kąty poziome, - wcięcie liniowe polega na wyznaczeniu położenia punktu na podstawie pomierzonych odległości między wyznaczanym punktem, a punktami o znanych współrzędnych (bazy wcięcia), - wcięcie kątowo - liniowe jest to takie wcięcie, w którym dla określenia położenia punktu podlegają pomiarowi kąty i odległości w punktach bazy wcięcia. 6. Fotogrametrii naziemnej polega na przetworzeniu danych zarejestrowanych na zdjęciach fotograficznych kamerą fotogrametryczną na punktach osnowy geodezyjnej..")
33
Przetworzenie danych fotogrametrycznych polega na odczytaniu współrzędnych tłowych na zdjęciach i wykonania transformacji do układu współrzędnych w przyjętym układzie odniesienia. 7. z użyciem technologii GPS.

34
Stanowisko: 2007 2008 42 44 40 41 1. Pomiary sytuacyjne metodą biegunową

35
1a. Stanowisko pomiarowe

36
dr g Fragment szkicu polowego z pomiaru metodą biegunową

37
2. Pomiary sytuacyjne metodą ortogonalną (domiarów prostokątnych) węgielnica 507 2008 taśma 1 ruletka miara bieżąca domiar czołówka Linia pomiarowa pomiędzy punktami 507-2008
 węgielnica taśma 1 ruletka miara bieżąca domiar czołówka Linia pomiarowa pomiędzy punktami")
38
Fragment szkicu polowego z pomiaru met. ortogonalną

39
3. Metoda przedłużeń, A,B,C,D – punkty osnowy pomiarowej - 10.02 - -7.50-

40
Miary kontrolne Miary kontrolne: a) uzyskane z drugiego, niezależnego wyznaczenia położenia szczegółów, b) miary czołowe (tzw. czołówki), długości odcinków pomiędzy kolejnymi punktami konturu, c) miary przeciwprostokątne (tzw. podpórki), w metodzie ortogonalnej, d) miary do punktów przecięcia się linii pomiarowych z z konturem obiektów (szczegółów terenowych).
, długości odcinków pomiędzy kolejnymi punktami konturu, c) miary przeciwprostokątne (tzw. podpórki), w metodzie ortogonalnej, d) miary do punktów przecięcia się linii pomiarowych z z konturem obiektów (szczegółów terenowych)..")
41
Kątowe wcięcie w przód X Y A P

42
Zastosowanie techniki GPS w geodezji Technika GPS znalazła zastosowanie w geodezyjnych pomiarach szczegółowych przez wykorzystanie kinematycznego trybu pracy czyli Real-Time Kinematic (RTK). Wyniki uzyskane techniką GPS zapewniają dokładność wymaganą w pomiarach terenowych. Zintegrowanie odbiorników GPS z tachimetrami elektronicznymi, zmniejszenie zawodności metody z powodu przesłonięcia satelitów.

43
Satelity systemu pozycyjnego GPS GPS składa się z 24 satelitów, w tym 3 aktywnych satelitów zapasowych. Rozmieszczone po 4 satelity na 6 orbitach kołowych, na wysokości około 20200 km. Widoczne 5 satelitów w punkcie Ziemi z prawdopodobieństwem 0.9996. Satelity obiegają kulę ziemską dwa razy w ciągu doby wysyłając sposób ciągły sygnały radiowe.

44
SYSTEM GLONAS Budowę systemu GLONASS rozpoczęto1 grudnia 1976. W grudniu 2011 GLONASS ponownie osiągnął pełną funkcjonalność. Na orbicie znajdują się 24 satelity operacyjne, rozmieszczonych na 3 orbitach. Orbity prawie kołowe, na wysokość 19 100 km (nieco niżej niż w GPS), okres obiegu 11.25 godz., satelity GPS mają okres 12 godzin. Stan na 1 stycznia 2012, łącznie 31 satelitów, z czego 24 ma status operacyjny, a 3 rezerwowy
, okres obiegu godz., satelity GPS mają okres 12 godzin. Stan na 1 stycznia 2012, łącznie 31 satelitów, z czego 24 ma status operacyjny, a 3 rezerwowy.")
45
GPS/GLONAS GPS/GLONASS Wykorzystanie dwóch systemów satelitarnych sprawia, że odbiorniki GPS/GLONASS odbierają sygnały z 41 satelitów. System GPS wykorzystuje 24. Technika GPS znalazła zastosowanie w geodezyjnych pomiarach szczegółowych przez wykorzystanie kinematycznego trybu pracy czyli Real-Time Kinematic (RTK). W czasie rzeczywistym uzyskuje się współrzędne punktów z dokładnością kilku centymetrów. Wyniki uzyskane techniką GPS zapewniają dokładność wymaganą w pomiarach terenowych. Zintegrowanie odbiorników GPS z tachimetrami elektronicznymi, zmniejszenie zawodności metody z powodu przesłonięcia satelitów.
. W czasie rzeczywistym uzyskuje się współrzędne punktów z dokładnością kilku centymetrów. Wyniki uzyskane techniką GPS zapewniają dokładność wymaganą w pomiarach terenowych. Zintegrowanie odbiorników GPS z tachimetrami elektronicznymi, zmniejszenie zawodności metody z powodu przesłonięcia satelitów..")
46
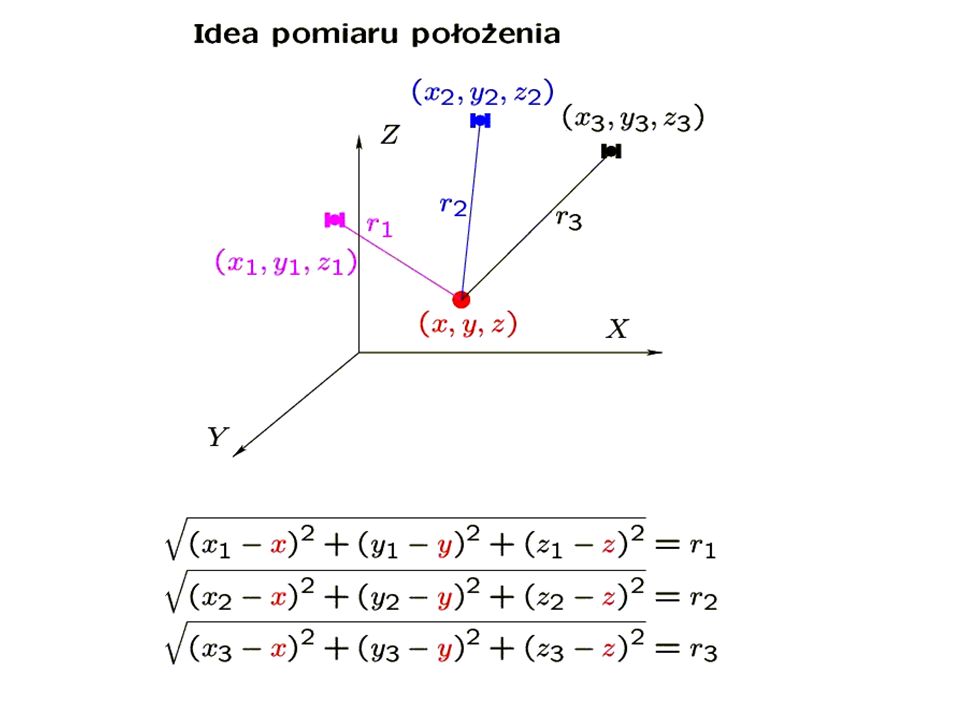
ZASADY POMIARU POZYCJI ODBIORNIKA Satelita GPS wysyła sygnał 50 razy na sekundę na dwóch częstotliwościach L1 i L2 (PRECISE), zawierające depesze nawigacyjne – parametry orbity poprawkę zegara odbiornika, dokładny czas zegara atomowego oraz stan systemu. Każdy sygnał dostarcza jedno równanie z 4 niewiadomymi (X,Y,Z,T) Kody (C/A) i (P) w sygnale GPS wykorzystywane są do pomiaru czasu przebiegu sygnału od satelity do odbiornika. Długości fal L1 i L2 wynoszą odpowiednio około 19 i 24 cm. Wysokiej klasy sprzęt pomiarowy potrafi wyznaczyć fazę sygnału z dokładnością 1% długości odbieranej fali. W systemie GPS pozycję wyznacza się poprzez znalezienie punktu przecięcia linii sygnałów wysłanych przez satelity. Współrzędne punktów X,Y,Z można wyznaczyć met. absolutną (bezwzględną) lub względną w postaci różnic ∆X, ∆Y, ∆Z w odniesieniu do punktu o znanych współrzędnych.
 Kody (C/A) i (P) w sygnale GPS wykorzystywane są do pomiaru czasu przebiegu sygnału od satelity do odbiornika. Długości fal L1 i L2 wynoszą odpowiednio około 19 i 24 cm. Wysokiej klasy sprzęt pomiarowy potrafi wyznaczyć fazę sygnału z dokładnością 1% długości odbieranej fali. W systemie GPS pozycję wyznacza się poprzez znalezienie punktu przecięcia linii sygnałów wysłanych przez satelity. Współrzędne punktów X,Y,Z można wyznaczyć met. absolutną (bezwzględną) lub względną w postaci różnic ∆X, ∆Y, ∆Z w odniesieniu do punktu o znanych współrzędnych..")
48
Metody pomiaru 1.Metoda kodowa (pomiar pseudoodległości). Odbiornik emituje identyczny kod (C/A) lub P) tzw. replikę kodu i ocenia przesunięcie względem odebranego sygnału. Przesunięcie jest miarą czasu przebiegu sygnału i jest proporcjonalne do odległości (d = c*t). Uzyskany czas jest obarczony błędem synchronizacji zegarów, stąd nazwa pseudoodległości. 2.Metoda fazowa polega na pomiarze sygnału. Odległość d jest wyrażona przez liczbę n długości fali λ zawartych w mierzonym odcinku: d = n λ + φλ Odbiornik ma problem z określeniem liczby n („nieoznaczoność” pełnych cykli fali). Z dwóch kolejnych odebranych sygnałów w momentach: t o i t i, odbiornik obliczy: d i = n o λ + (n i - n o )λ + φ i λ, wartości: φ i oraz (n i - n o ) zostaną pomierzone, liczbę „n o ” wyznacza się przez inicjalizację pomiaru.
 lub P) tzw. replikę kodu i ocenia przesunięcie względem odebranego sygnału. Przesunięcie jest miarą czasu przebiegu sygnału i jest proporcjonalne do odległości (d = c*t). Uzyskany czas jest obarczony błędem synchronizacji zegarów, stąd nazwa pseudoodległości. 2.Metoda fazowa polega na pomiarze sygnału. Odległość d jest wyrażona przez liczbę n długości fali λ zawartych w mierzonym odcinku: d = n λ + φλ Odbiornik ma problem z określeniem liczby n („nieoznaczoność pełnych cykli fali). Z dwóch kolejnych odebranych sygnałów w momentach: t o i t i, odbiornik obliczy: d i = n o λ + (n i - n o )λ + φ i λ, wartości: φ i oraz (n i - n o ) zostaną pomierzone, liczbę „n o wyznacza się przez inicjalizację pomiaru..")
49
Pomiar długości metodą fazową polega na porównaniu fazy sygnału odebranego z satelity z sygnałem wygenerowanym przez odbiornik. Metody czasu rzeczywistego RTK z inicjalizacją On-The-Fly (OTF) umożliwiają szybkie (prawie natychmiastowe) wyznaczenie położenia punktu z dokładnością ±2 cm. Wartość nieoznaczoności pomiarów fazowych jest wyznaczana metodą KALMANA lub LAMBDA (w odbiornikach nowej generacji). Czas inicjalizacji pomiarów wynosi ok. 10 sekund. Aby prowadzić pomiary metodą RTK należy ustalić wcześniej związek między WGS 84 i płaskim układem współrzędnych docelowym (np. układem „2000”). Trzy sposoby precyzyjnego wyznaczania pozycji w trybie RTK w oparciu o zbiory danych transmitowanych bezpośrednio ze stacji referencyjnych: a) Jedna stacja referencyjna. b) Kilka stacji referencyjnych. c) Sieć stacji referencyjnych. Sieć tworzą co najmniej trzy stacje.
 umożliwiają szybkie (prawie natychmiastowe) wyznaczenie położenia punktu z dokładnością ±2 cm. Wartość nieoznaczoności pomiarów fazowych jest wyznaczana metodą KALMANA lub LAMBDA (w odbiornikach nowej generacji). Czas inicjalizacji pomiarów wynosi ok. 10 sekund. Aby prowadzić pomiary metodą RTK należy ustalić wcześniej związek między WGS 84 i płaskim układem współrzędnych docelowym (np. układem „2000 ). Trzy sposoby precyzyjnego wyznaczania pozycji w trybie RTK w oparciu o zbiory danych transmitowanych bezpośrednio ze stacji referencyjnych: a) Jedna stacja referencyjna. b) Kilka stacji referencyjnych. c) Sieć stacji referencyjnych. Sieć tworzą co najmniej trzy stacje..")
50
INNE METODY POMIARÓW Pomiary DGPS – serwisy KODGIS i NAWGIS Termin DGPS odnosi się do metody różnicowych pomiarów satelitarnych GPS. W przypadku prac wykonywanych w czasie rzeczywistym terminu tego używa się w odniesieniu do kodowych pomiarów satelitarnych, w których wyznaczona pozycja, tak jak w pomiarach RTK poprawiana jest na bieżąco o dane korekcyjne. W odróżnieniu od RTK, DGPS jest prostszą techniką wyznaczania współrzędnych, bazującą przede wszystkim na pomiarach kodowych tzn. nie istnieje potrzeba procesu inicjalizacji. Do obliczenia współrzędnych wystarczą 4 satelity GPS. Dokładność tej metody zależy od odległości od stacji bazowej. Pomiary wykonywane w oparciu o pojedynczą stację referencyjną ograniczone są ze względu na odległość pomiędzy odbiornikiem mobilnym a stacją bazową. Błąd wyznaczenia pozycji rośnie wraz z odległością. Stacje referencyjne łączone są w sieć zarządzaną przez centrum obliczeniowe. Odległości pomiędzy stacjami referencyjnymi wynoszą obecnie ok. 70 km.

51
Sieć stacji referencyjnych satelitarnego GPS Stacje referencyjne dla potrzeb geodezji i nawigacji powstały w celu stworzenia warunków do dokładnego wyznaczania położenia punktów geodezyjnych i pozycji pojazdów na lądzie i morzu w czasie rzeczywistym. Naziemne stacje referencyjne przesyłają depesze radiowe, zawierające poprawki dla odbiornika oraz dane pomiarowe. Ustanowienie stanowiska (kalibracja systemu) polega na uzyskaniu parametrów transformacji układów: WGS 84 i lokalnego („2000”). Komputer polowy (kontroler) pracujący ze stacją ruchomą GPS wylicza na podstawie danych z punktu referencyjnego i ruchomego pozycję w dowolnym momencie. Ważnym elementem pomiaru RTK jest inicjalizacja, która jest niezbędna na początku pomiaru i ewentualnie re-inicjalizacja w przypadku utraty sygnału.
 polega na uzyskaniu parametrów transformacji układów: WGS 84 i lokalnego („2000 ). Komputer polowy (kontroler) pracujący ze stacją ruchomą GPS wylicza na podstawie danych z punktu referencyjnego i ruchomego pozycję w dowolnym momencie. Ważnym elementem pomiaru RTK jest inicjalizacja, która jest niezbędna na początku pomiaru i ewentualnie re-inicjalizacja w przypadku utraty sygnału..")
52
LOKALIZATOR OSOBISTY

53
Odbiornik HIPER PRO

54
Odbiorniki GPS

55
Odbiornik GPS GR-3

56
ODBIORNIKI DGPS

57
DOKŁADNOŚĆ POMIARÓW GEODEZYJNYCH Zależnie od metod i aparatury wyróżnia się dwie klasy pomiarów: - pomiary precyzyjne, - pomiary techniczne. Jako granicę dokładności dla mierzonych długości odcinków przyjmuje się 1 cm, dla kątów 0.1 c, dla różnic wysokości 1mm. Gdy zadanie wymaga uzyskania danych geodezyjnych z błędem < 1 cm, < 0.1 c i < 1mm, należy wykonać pomiary precyzyjne korzystając z precyzyjnych instrumentów geodezyjnych. Wykorzystane metody pomiaru zawierają procedury do wprowadzenia poprawek redukujących błędy systematyczne przyrządów i środowiska. W praktyce dokładność ocenia się po analizie obliczonych odchyłek danych geodezyjnych wymiarów, kształtu, położenia, warunków geometrycznych, a także stanu budowli w danym momencie (przemieszczeń i odkształceń). Odchyłki oblicza się w trzech przypadkach: 1.Ocena wyników dwukrotnego pomiaru Δ L = L 1 – L 2, 2.Ocena spełnienia geometrycznego warunku, który mają spełnić wyniki pomiarów. Warunek geometryczny jednoznacznie określa funkcja, której argumentami są wymiary Δ F = F(L 1, L 2,…, L k ) - F(R 1, R 2,…,R k ) R i - wymiar rzeczywisty,L i - wynik pomiaru,
. Odchyłki oblicza się w trzech przypadkach: 1.Ocena wyników dwukrotnego pomiaru Δ L = L 1 – L 2, 2.Ocena spełnienia geometrycznego warunku, który mają spełnić wyniki pomiarów. Warunek geometryczny jednoznacznie określa funkcja, której argumentami są wymiary Δ F = F(L 1, L 2,…, L k ) - F(R 1, R 2,…,R k ) R i - wymiar rzeczywisty,L i - wynik pomiaru,.")
58
3. Ocena wyników pomiaru kontrolnego, zrealizowanej budowli. Odchyłka stwierdzona - Δ N = L – N, N – wymiar nominalny (projektowy), L – wymiar stwierdzony Obliczone odchyłki wyników, bezpośrednich pomiarów długości odcinków, kątów i różnic wysokości posłużą jako dane do obliczenia błędu średniego według wzoru: n – liczba odchyłek w zbiorze danych. m o - błąd średni obserwacji o wadze równej jedności. P(- r m o ≤ │ε │ ≤ r m o ) = P(r) r=2 P(r) = 0.9545 Porównanie obliczonych odchyłek Δ L, Δ F i Δ N z dopuszczalną wartością podaną w normach, instrukcjach, specyfikacjach technicznych przypisanych dla zadania. Δ L ≤ dL dop
, L – wymiar stwierdzony Obliczone odchyłki wyników, bezpośrednich pomiarów długości odcinków, kątów i różnic wysokości posłużą jako dane do obliczenia błędu średniego według wzoru: n – liczba odchyłek w zbiorze danych. m o - błąd średni obserwacji o wadze równej jedności. P(- r m o ≤ │ε │ ≤ r m o ) = P(r) r=2 P(r) = Porównanie obliczonych odchyłek Δ L, Δ F i Δ N z dopuszczalną wartością podaną w normach, instrukcjach, specyfikacjach technicznych przypisanych dla zadania. Δ L ≤ dL dop.")
59
Dopuszczalne różnice d L dwukrotnego pomiaru długości boków osnowy pomiarowej gdzie: u = 0,0059 - wsp ó łczynnik błęd ó w przypadkowych pomiaru liniowego l - długość mierzonego boku długość boku l dopuszczalna różnica d l w metrach 26 46 72 103 141 184 233 287 348 414 186 563 646 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10 0.11 0.12 0.13 0.14 0.15

60
Dopuszczalne odchyłki kątowe w ciągach sytuacyjnych gdzie: m 0 - średni błąd pomiaru kąta: 60" (180 cc ) dla ciąg ó w o długości do 1,2 km 30" (90 cc ) dla ciąg ó w o długości większej niż 1,2 km n k - liczba kąt ó w zmierzona w ciągu Liczba kątów n k Dopuszczalna odchyłka f α w ciągu o długości do 1.2 kmpowyżej 1,2 km ' "c cc' "c cc 2 3 4 5 6 7 8 9 10 1 25 1 44 2 00 2 14 2 27 2 39 2 50 3 00 3 10 2 54 3 12 3 60 4 02 4 41 4 76 5 09 5 40 5 69 - 1 13 1 19 1 25 1 30 1 35 - 2 20 2 38 2 55 2 70 2 85
 dla ciąg ó w o długości do 1,2 km 30 (90 cc ) dla ciąg ó w o długości większej niż 1,2 km n k - liczba kąt ó w zmierzona w ciągu Liczba kątów n k Dopuszczalna odchyłka f α w ciągu o długości do 1.2 kmpowyżej 1,2 km c cc c cc")
61
Dopuszczalne odchyłki liniowe ciąg ó w sytuacyjnych przy obliczeniu przyrost ó w wsp ó łrzędnych na podstawie kąt ó w poprawionych ze względu na zamknięcie kątowe L - długość ciągu u = 0.0059 - wsp ó łczynnik błęd ó w przypadkowych pomiaru liniowego m 0 = 30" (90 cc ) - średni błąd pomiaru kąta n - liczba bok ó w w ciągu c = 0.10 - wpływ błęd ó w położenia punkt ó w nawiązania długość ciągu L dopuszczalne odchyłka f L 300 400 500 600 700 800 900 1000 1100 1200 0.15 0.16 0.17 0.19 0.20 0.22 0.23 0.24 0.26 0.27
 - średni błąd pomiaru kąta n - liczba bok ó w w ciągu c = wpływ błęd ó w położenia punkt ó w nawiązania długość ciągu L dopuszczalne odchyłka f L")
62
Dopuszczalne odchyłki otrzymanych z pomiaru w kierunku gł ó wnym i powrotnym ciąg ó w niwelacyjnych oraz nawiązania ciąg ó w do punkt ó w wyższych klas lub punkt ó w węzłowych L - długość odcinka lub ciągu w km Długość odcinka (ciągu) L Dopuszczalna odchyłka f h mm Długość odcinka (ciągu) L Dopuszczalna odchyłka f h mm 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.2 1.4 1.6 1.8 2.0 3.0 3.2 8.9 10.9 12.6 14.1 15.5 16.7 17.9 19.0 20.0 21.9 23.7 25.3 26.8 28.3 34.6 35.8 3.4 3.6 3.8 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.5 8.0 8.5 9.0 11.5 12.0 36.9 38.0 39.0 40.0 42.4 44.7 46.9 49.0 51.0 52.9 54.8 56.6 58.3 60.0 67.8 69.3
 L Dopuszczalna odchyłka f h mm Długość odcinka (ciągu) L Dopuszczalna odchyłka f h mm")
63
Dziękuję za uwagę.



>")

. Od pięciu do siedmiu zadań. Ćwiczenia: –Obecność na ćwiczeniach. –Pozytywne oceny.>")

 1. Energia mechaniczna 2. Praca 3.>")













