Teoria sterowania Wykład 13 Modele dyskretne obiektów regulacji. Stabilność dyskretnych układów regulacji.
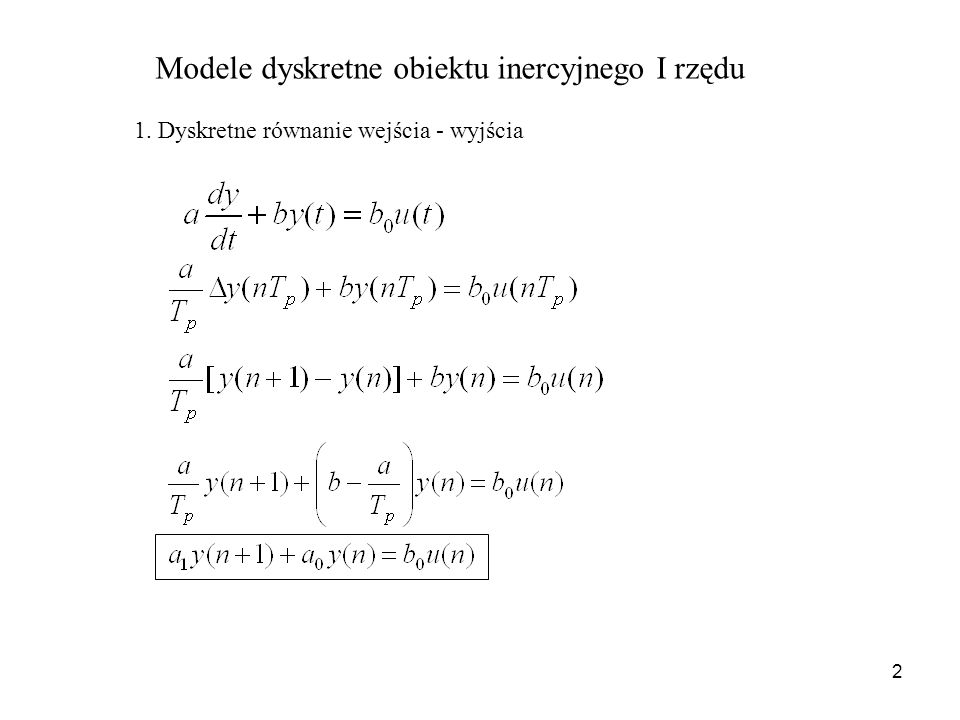
Modele dyskretne obiektu inercyjnego I rzędu 1. Dyskretne równanie wejścia - wyjścia
2.Transmitancja dyskretna Transformata Z
Modele dyskretne obiektu II rzędu 1. Dyskretne równanie wejścia - wyjścia
2.Transmitancja dyskretna
Modele dyskretne obiektu k-tego rzędu 1.Dyskretne równanie wejścia – wyjścia: 2.Transmitancja dyskretna:
3. Dyskretne równania stanu i równanie wyjścia
(dyskretne równanie wyjścia) Dyskretne równania stanu (dyskretne równanie wyjścia) Zapis wektorowo-macierzowy dysketnych równań stanu i dyskretnego równania wyjścia
Stabilność dyskretnych układów regulacji
Układ regulacji dyskretnej jest stabilny, gdy ograniczonemu ciągowi wartości sygnału wejściowego w(nTp) odpowiada ograniczony ciąg wartości sygnału wyjściowego y(nTp). zi – bieguny transmitancji dyskretnej G(z) układu regulacji Dla
(warunek stabilności) Dla pierwiastków równania znajdujących się w lewej półpłaszczyźnie zmiennej zespolonej s ( 0) mamy (warunek stabilności) Im z j j3/Tp j z=1 j2/Tp j/Tp 1 Re z –j/Tp –j2/Tp –j3/Tp –j
Dla p = 1 (p – krotność bieguna funkcji Y(z) )