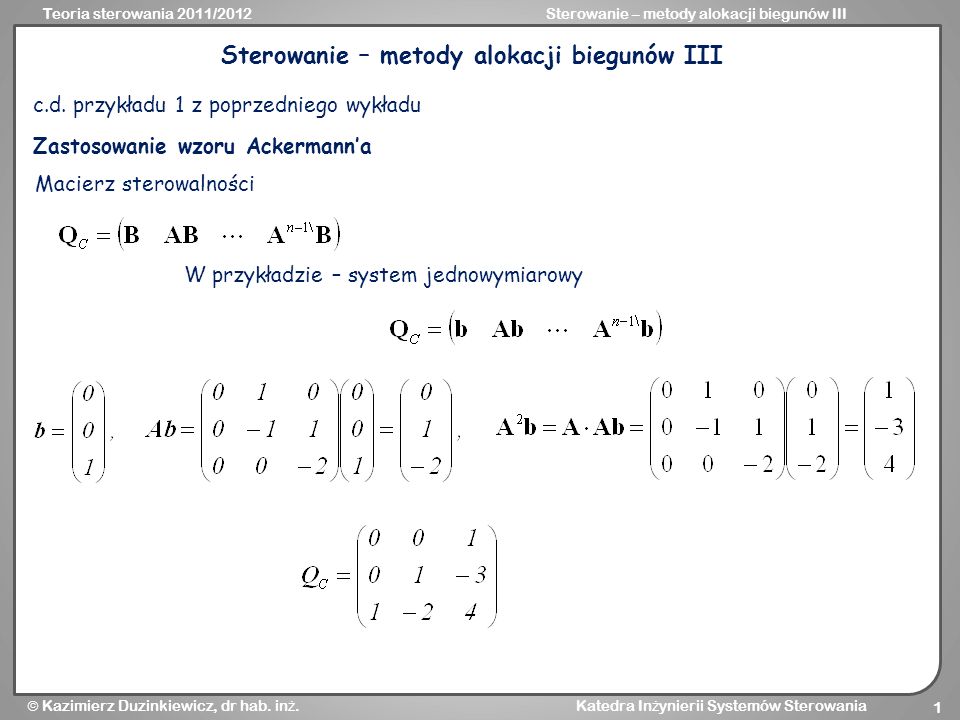
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 1 Sterowanie – metody alokacji biegunów III c.d. przykładu 1 z poprzedniego wykładu Zastosowanie wzoru Ackermanna Macierz sterowalności W przykładzie – system jednowymiarowy
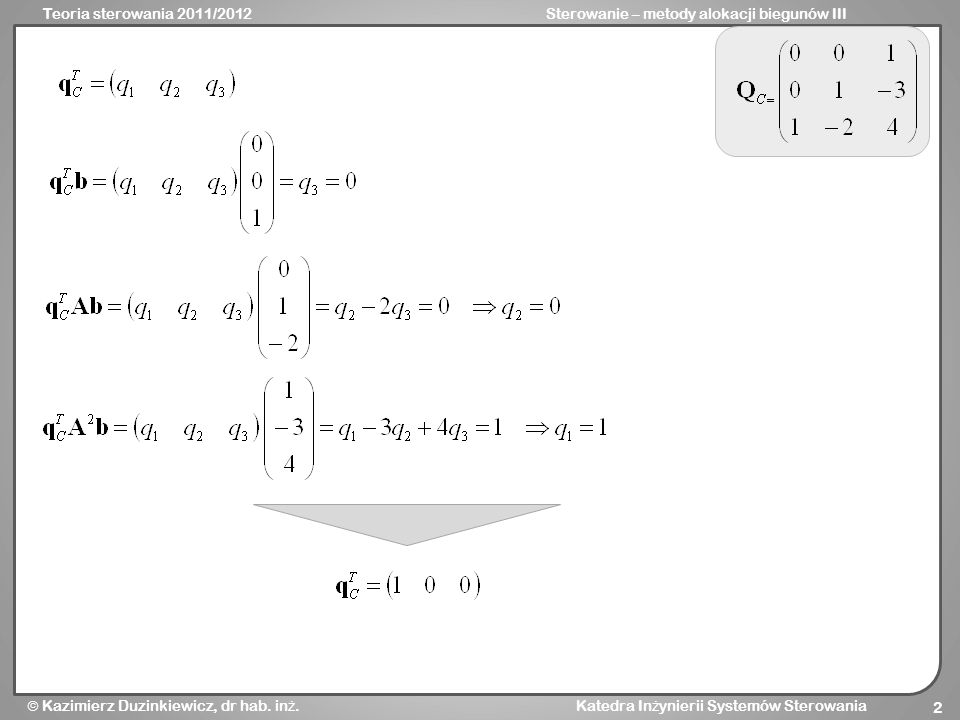
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 2
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 3
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 4 Pożądany wielomian charakterystyczny systemu zamkniętego Prawo sterowania
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 5 Przykład 2 System trzeciego rzędu System SISO Wartości własne systemu (bieguny systemu) Złożenie: człon pierwszego rzędu inercyjny, człon drugiego rzędu oscylacyjny Parametry: - człon pierwszego rzędu inercyjny: stała czasowa bezwładności - - człon drugiego rzędu oscylacyjny: pulsacja drgań własnych nietłumionych - współczynnik tłumienia -
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 6 System jednowymiarowy – sprawdzenie sterowalności przez sprawdzenie wyznacznika macierzy sterowalności Kalmana Wartość wyznacznika niezerowa – system jest sterowalny (policzyć!) Należy zaprojektować sterownik od stanu regulacyjny taki, aby otrzymać system zamknięty z wartościami własnymi rzeczywistymi jednakowymi dającymi stałe czasowe bezwładności około 1.5 s. Zatem wartości własne Stąd Zaprojektujemy sterownik korzystając z postaci kanonicznej sterowalności systemu
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 7 Skorzystamy z Twierdzenia D1 (poprzedni wykład) Z otrzymanego układu trzech równań liniowych z trzema niewiadomymi obliczymy
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 8 Możemy obliczyć macierz przekształcenia podobieństwa Otrzymamy
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 9 Stąd lub czyli używając oznaczeń odnoszących się do postaci kanonicznej sterowalności
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 10 Możemy obliczyć macierz wzmocnień
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 11 Możemy obliczyć wartości własne systemu zamkniętego Niezbyt dokładnie to, co chcieliśmy – zbyt duże błędy zaokrągleń Symulacja systemu zamkniętego Warunki początkowe zerowe, y r – skok jednostkowy
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 12 Wyjście Sterowanie (wejście) Przeregulowania (około 12%) !!!
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 13 Transmitancja systemu otwartego Zero systemu powodem oscylacji
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 14 Pytanie: co dzieje się z zerami systemu podczas przemieszczania biegunów w pożądane położenie za pomocą sprzężenia zwrotnego od stanu? Twierdzenie: Zera systemu (otwartego) nie zmieniają się po dodaniu sprzężenia zwrotnego od stanu. Innymi słowy, zera systemu, który został zamknięty przez macierz wzmocnień L sprzężenia zwrotnego od stanu są zerami pierwotnego systemu
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 15 Przykład 3 – system niesterowalny lecz stabilizowalny Wartości własne System jest stabilny Macierz sterowalności Kalmana System jest niesterowalny
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 16 Dwie pierwsze kolumny - liniowo niezależne Rząd macierzy sterowalności wynosi 2 Propozycja macierzy przekształcenia podobieństwa potrzebnej do dekompozycji na podprzestrzenie sterowalne i niesterowalne
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 17 Przekształcenie podobieństwa Otrzymujemy macierze
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 18 Sterowalna część systemu opisana jest macierzami: Niesterowalna część systemu opisana jest macierzami: Macierz sterowalności części sterowalnej Macierz wzmocnień – dwie części
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 19 Część sterowalna – rząd drugi dwie wartości własne (bieguny) mogą być umieszczone w dowolnym położeniu Niech Aby znaleźć macierz wzmocnień zastosujemy wzór Ackermanna
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 20 Trzeci element macierzy wzmocnień nie ma wpływu na położenie wartości własnych systemu zamkniętego i może być wybrany dowolnie, na przykład równy zero
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 21 Dokonując retransformacji Niejednoznaczność wyznaczenia macierzy L !!!
Teoria sterowania 2011/2012Sterowanie – metody alokacji biegunów III Kazimierz Duzinkiewicz, dr hab. in ż. Katedra In ż ynierii Systemów Sterowania 22 Dziękuję za uczestnictwo w wykładzie i uwagę