Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Modele hydrauliki elementów SW
Zagadnienia ważne dla poprawnego zbudowania modeli sieci: przepływ wody w rurociągach i straty energii z tym związane, wpływ zaworów (w tym: zaworów regulacyjnych), pomp i zbiorników na przepływy i rozkład ciśnień w sieci
, pomp i zbiorników na przepływy i rozkład ciśnień w sieci.")
2
Rodzaje przepływów wody (płynów) w rurociągach
Rurociągi: Rodzaje przepływów wody (płynów) w rurociągach przepływ laminarny, przepływ turbulentny Liczba Reynolds’a prędkość przepływu v – prędkość przepływu Wartość graniczna: D – średnica rurociągu – lepkość kinematyczna lepkość kinematyczna
 w rurociągach. przepływ laminarny, przepływ turbulentny. Liczba Reynolds’a. prędkość przepływu. v – prędkość przepływu. Wartość graniczna: D – średnica rurociągu. – lepkość kinematyczna. lepkość kinematyczna.")
3
Profile prędkości wody dla różnych przepływów
W większości typowych stanów operacyjnych w SW – przepływy turbulentne Profile prędkości wody dla różnych przepływów v punktowa Turbulentny v średnia Laminarny v punktowa

4
Główne straty naporu w rurociągach = straty tarcia w rurociągach
Ogólny wzór na obliczenie strat tarcia – równanie Darcy – Weisbach’a (D-W): L – długość rurociągu, [L] D – średnica rurociągu, [L] v – prędkość przepływu, [L/T] lub: Q – natężenie przepływu, [L3/T] f – współczynnik tarcia Darcy – Weisbach’a; ogólnie wartość zależna od rodzaju przepływu i chropowatości rurociągu, [-]
: L – długość rurociągu, [L] D – średnica rurociągu, [L] v – prędkość przepływu, [L/T] lub: Q – natężenie przepływu, [L3/T] f – współczynnik tarcia Darcy – Weisbach’a; ogólnie wartość zależna od rodzaju przepływu i chropowatości rurociągu, [-]")
5
Brak zależności od chropowatości rurociągu
Dla przepływu laminarnego: lepkość kinematyczna Brak zależności od chropowatości rurociągu Dla przepływu turbulentnego: prędkość przepływu Zależności empiryczne dla rożnych przedziałów wartości liczby Reynolds’a – zauważalna prawidłowość: im bardziej turbulentny przepływ tym mniejsza zależność od Re a większa od chropowatości rurociągu Podsumowanie prac eksperymentalnych – diagram Moody’iego

6
Brak zależności od Re, zależność tylko od chropowatości względnej, e/D
Diagram Moody’iego Brak zależności od Re, zależność tylko od chropowatości względnej, e/D

7
Przykładowe wartości współczynnika chropowatości e (nowe rurociągi):
Stal nitowa Beton Drewno klepkowe Żeliwo Żelazo ocynkowane Stal techniczna Niepokryty cement azbestowy, rury PCV faliste, wstępnie sprężany beton Rury ciągnione

8
Wniosek: Dla przepływu odpowiadającego dużym wartościom liczby Reynolds’a (Re > 4000) i rurociągów o dużej chropowatości względnej (duże e/D) współczynnik tarcia D-W nie zależy od wartości Re (m.in. prędkości przepływu) Jeżeli napiszemy równanie D-W w ogólniejszej postaci: W ogólności: RD-W – zależne od parametrów rurociągu i warunków przepływu to dla wymienionych warunków RD-W = const Pomimo tego, że równanie D-W posiada najbardziej racjonalne podstawy do stosowania dla przepływów w rurociągach, w praktyce stosowane są często dwa inne równania empiryczne dla wyznaczenia strat naporu wynikających z tarcia: • równanie Hazen’a-Williams’a • równanie Manning’a
 i rurociągów o dużej chropowatości względnej (duże e/D) współczynnik tarcia D-W nie zależy od wartości Re (m.in. prędkości przepływu) Jeżeli napiszemy równanie D-W w ogólniejszej postaci: W ogólności: RD-W – zależne od parametrów rurociągu i warunków przepływu. to dla wymienionych warunków RD-W = const. Pomimo tego, że równanie D-W posiada najbardziej racjonalne podstawy do stosowania dla przepływów w rurociągach, w praktyce stosowane są często dwa inne równania empiryczne dla wyznaczenia strat naporu wynikających z tarcia: • równanie Hazen’a-Williams’a • równanie Manning’a.")
9
Stała Ku w równaniu Hazen’a – Williams,a
I. empiryczny wzór na obliczenie strat tarcia – równanie Hazen’a – Williams’a (H-W): Ku – stała zależna od stosowanych jednostek CH-W – stała Hazen’a – Williams’a [-] Stała Ku w równaniu Hazen’a – Williams,a
: Ku – stała zależna od stosowanych jednostek. CH-W – stała Hazen’a – Williams’a [-] Stała Ku w równaniu Hazen’a – Williams,a.")
10
Dla jednostek układu SI z D-L-Q w m-m-m3/s stała Ku = 10.68
Wprowadzimy tą stałą i zapiszemy równanie H-W w postaci: Układ jednostek SI Równanie H-W zostało pierwotnie opracowane dla przepływów turbulentnych w rurociągach Stała H-W zależy od wymiarów rurociągu oraz warunków przepływu

11
Przykładowe wartości współczynnika H-W dla różnych materiałów i średnic rurociągów (nowe rurociągi) – dla v = 0.9m3/s
 – dla v = 0.9m3/s")
12
Współczynniki korekcyjne współczynników H-W z poprzedniej tablicy dla prędkości przepływu rożnej od 0.9m3/s

13
Możemy napisać równanie H-W w ogólniejszej postaci:
W ogólności: RH-W – zależne od parametrów rurociągu i warunków przepływu

14
II. empiryczny wzór na obliczenie strat tarcia – równanie Manning’a (M):
Kum – stała zależna od stosowanych jednostek Nm – współczynnik chropowatości Manning’a [-] Przykładowe wartości współczynnika chropowatości M dla różnych materiałów

15
Dla jednostek układu SI z D-L-Q w m-m-m3/s stała Kum = 10.29
Wprowadzimy tą stałą i zapiszemy równanie M w postaci: Układ jednostek SI Równanie M zostało pierwotnie opracowane dla przepływów w otwartych kanałach, lecz może być stosowane dla całkowicie turbulentnych przepływów w rurociągach Tym nie mniej wskazanie: równanie M stosować dla chropowatych rurociągów

16
Podsumowanie: ogólny wzór na zasadnicze straty naporu w rurociągach wynikające z tarcia:
R – rezystancja rurociągu n – wykładnik

17
Porównanie:

18
Wiek rurociągów i parametry chropowatości
Z czasem ścianki rurociągu pokrywają się osadami, co prowadzi do: • zmniejszenia średnicy rurociągu, • zwiększenia chropowatości rurociągu

19
Istnieją opracowania podające zamiany odpowiednich współczynników z wiekiem rurociągu – przykład niżej Jednak Zasada: Dla określenia aktualnych wartości parametrów rurociągów w SW sieć powinna być skalibrowana w oparciu o pomiary na obiekcie

20
Rurociąg – połączenie: umiejscowienie zależności na zasadnicze straty naporu – straty tarcia w modelu rurociągu wynikającym z prawa zachowania energii i – indeks węzła w którym woda wpływa do rurociągu j – indeks węzła w którym woda wypływa z rurociągu Założenie: rurociąg bez pompy

21
Elementy strat pomniejszych:
Pomniejsze straty naporu w rurociągach = straty zaburzeń przepływu w rurociągach Powody zaburzeń – zmiany profilu strumienia spowodowane: • nagłą lub stopniową zmianą przekroju ograniczającego przepływ strumienia, • zmianą kierunku przepływu, • występowaniem lokalnych przeszkód Pomniejsze straty naporu są zwykle w SDiDW małe w porównaniu do strat tarcia i zwykle są pomijane w modelowaniu

22
Pomniejsze straty modelowane są za pomocą równania:
M – współczynnik pomniejszych strat

23
Przykładowa tablica współczynników M – pomniejszych strat

24
Jeżeli źródłem pomniejszych strat jest zawór, wówczas często jego charakterystyka hydrauliczna dana jest wzorem: Cd – współczynnik przepływu A – pole przekroju przepływu przez zawór H – spadek naporu na zaworze Porównując z ogólnym wzorem na pomniejsze straty naporu, otrzymać można równość:

25
oraz: zmienne

26
Elementy strat pomniejszych – połączenie: umiejscowienie zależności na pomniejsze straty naporu w modelu wynikającym z prawa zachowania energii i – indeks węzła w którym woda wpływa do elelmentu j – indeks węzła w którym woda wypływa z elementu

27
Rodzaje zaworów modelowanych w SDiDW:
• zawór redukcji ciśnienia (Pressure Reducing Valve – PRV) Ogranicza ciśnienie po swojej wylotowej stronie do nastawionej wartości Stosowany, np.: w systemie dostarczania grawitacyjnego wody, gdy występują obszary o dużych różnicach wyniesień – spadek naporu na zaworze zmienia się w rytmie zmian naporu na wlocie Linia profilu naporu, kiedy zawór końcowy zamknięty Nachylenie spadku naporu Ciśnienie na końcu układu PRV Zbiornik System przesyłu grawitacyjnego - zastosowanie PRV
 Ogranicza ciśnienie po swojej wylotowej stronie do nastawionej wartości. Stosowany, np.: w systemie dostarczania grawitacyjnego wody, gdy występują obszary o dużych różnicach wyniesień – spadek naporu na zaworze zmienia się w rytmie zmian naporu na wlocie. Linia profilu naporu, kiedy zawór końcowy zamknięty. Nachylenie spadku naporu. Ciśnienie na końcu układu. PRV. Zbiornik. System przesyłu grawitacyjnego - zastosowanie PRV.")
28
w systemie dostarczania pompowego wody, gdy woda podawana/pobierana jest jednocześnie do/z zbiornika Wysokość podnoszenia pomp Nachylenie spadku naporu Dostarczanie wody Dystrybucja wody Zasilanie pod ciśnieniem PRV Ciśnienie na końcu układu Zbiornik Stany pracy PRV: częściowo otwarty (czyli: aktywny) – dla utrzymania nastawionego ciśnienia na wylocie, kiedy ciśnienie na wlocie jest większe od nastawionego całkowicie otwarty (czyli: nie aktywny) – kiedy ciśnienie na wlocie jest mniejsze od nastawionego zamknięty – kiedy ciśnienie na wylocie jest większe od ciśnienia na wlocie – tzn. nie dopuszcza się przepływu powrotnego
 – dla utrzymania nastawionego ciśnienia na wylocie, kiedy ciśnienie na wlocie jest większe od nastawionego. całkowicie otwarty (czyli: nie aktywny) – kiedy ciśnienie na wlocie jest mniejsze od nastawionego. zamknięty – kiedy ciśnienie na wylocie jest większe od ciśnienia na wlocie – tzn. nie dopuszcza się przepływu powrotnego.")
29
Linia profilu hydraulicznego
• zawór podtrzymania ciśnienia (Pressure Sustaining Valve – PSV) Zapewnia utrzymanie minimalnego nastawionego ciśnienia po stronie swego wlotu Stosowany, np.: w systemie dostarczania grawitacyjnego wody, gdy występują obszary o dużych różnicach wyniesień – spadek naporu na zaworze zmienia się w rytmie zmian naporu na wylocie Zbiornik „wysoki” Zbiornik „niski” Linia profilu hydraulicznego z PSV bez PSV PSV Strefa „górna” Strefa „dolna”
 Zapewnia utrzymanie minimalnego nastawionego ciśnienia po stronie swego wlotu. Stosowany, np.: w systemie dostarczania grawitacyjnego wody, gdy występują obszary o dużych różnicach wyniesień – spadek naporu na zaworze zmienia się w rytmie zmian naporu na wylocie. Zbiornik „wysoki Zbiornik „niski Linia profilu hydraulicznego. z PSV. bez PSV. PSV. Strefa „górna Strefa „dolna")
30
Stany pracy PSV: częściowo otwarty (czyli: aktywny) – dla utrzymania nastawionego ciśnienia na wlocie, kiedy ciśnienie na wylocie jest mniejsze od nastawionego całkowicie otwarty (czyli: nie aktywny) – kiedy ciśnienie na wylocie jest większe od nastawionego zamknięty – kiedy ciśnienie na wylocie jest większe od ciśnienia na wlocie – tzn. nie dopuszcza się przepływu powrotnego
 – dla utrzymania nastawionego ciśnienia na wlocie, kiedy ciśnienie na wylocie jest mniejsze od nastawionego. całkowicie otwarty (czyli: nie aktywny) – kiedy ciśnienie na wylocie jest większe od nastawionego. zamknięty – kiedy ciśnienie na wylocie jest większe od ciśnienia na wlocie – tzn. nie dopuszcza się przepływu powrotnego.")
31
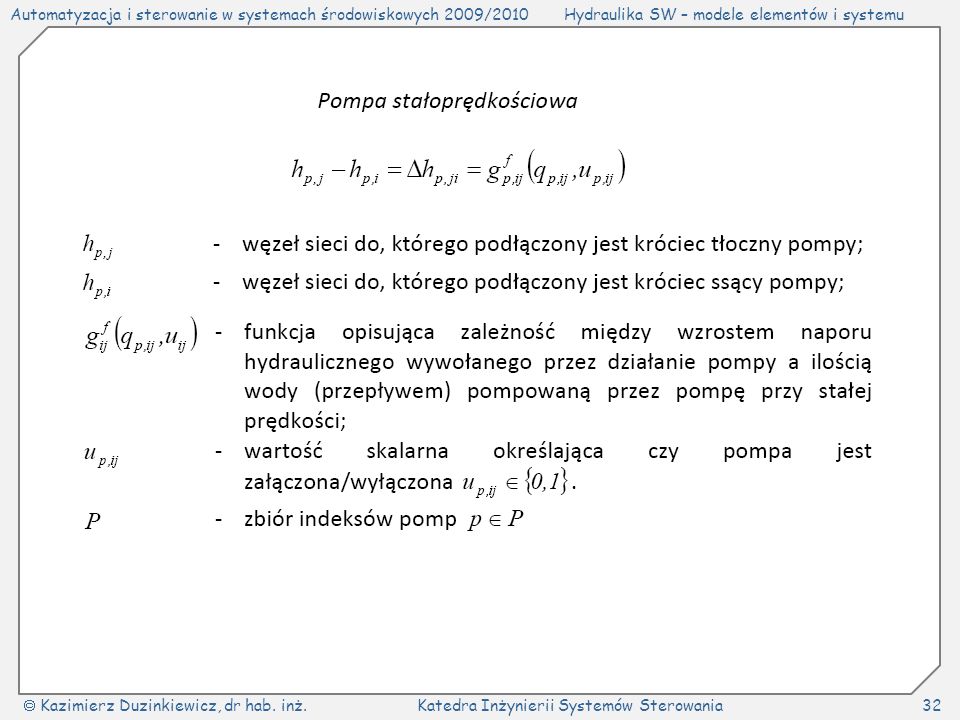
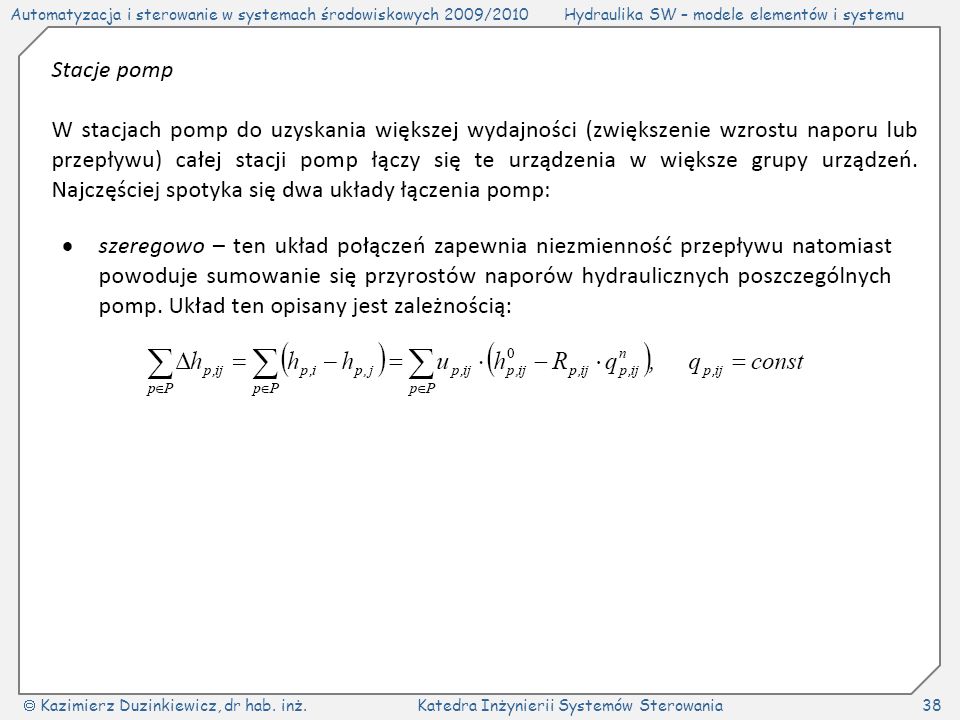
Pompy: Pompy: - stało i zmienno prędkościowe - stacje pomp

34
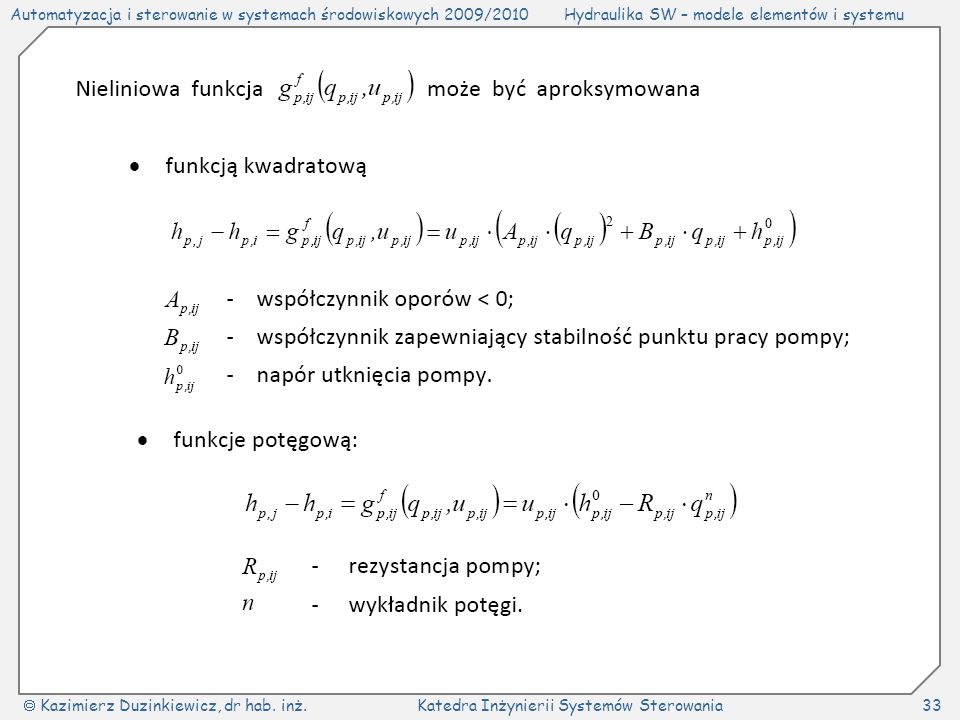
kwadratowego potęgowego

37
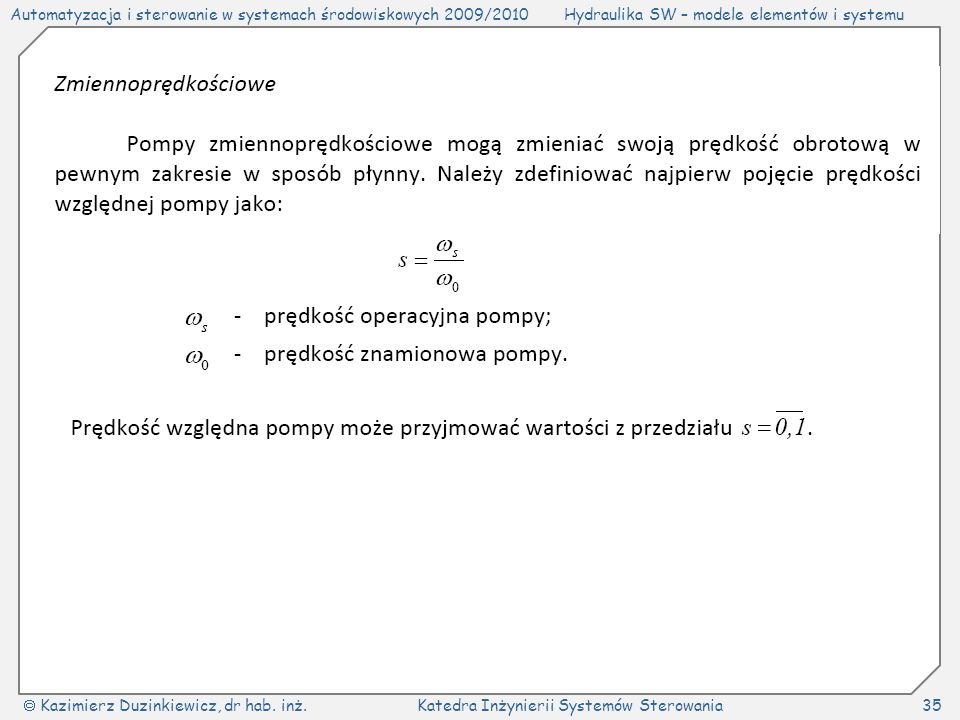
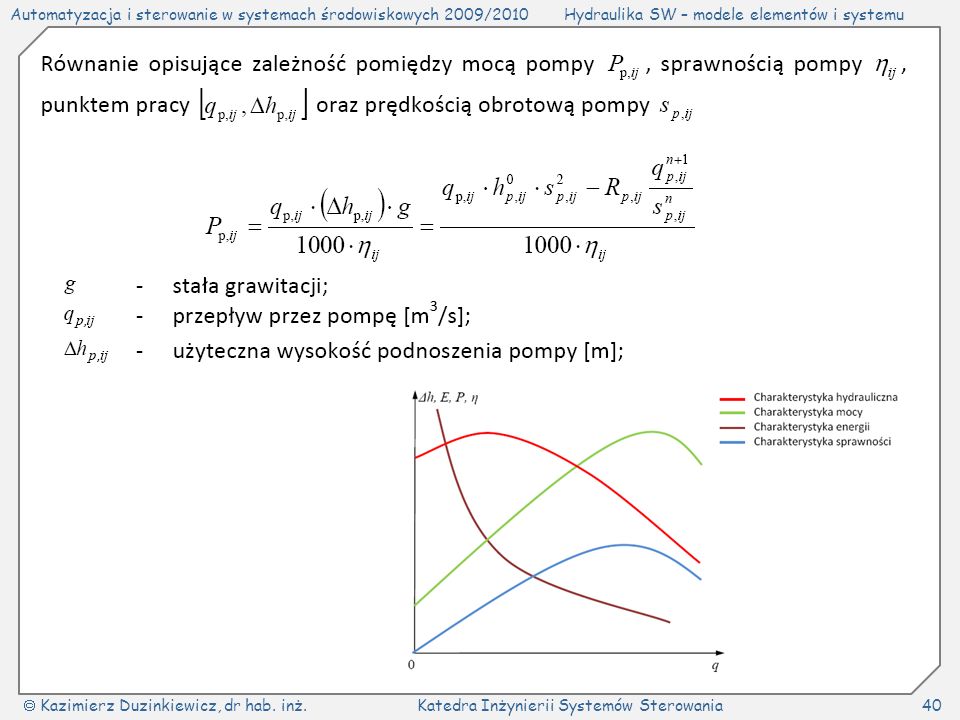
Charakterystyki pompy zmienno prędkościowej:

41
Koniec części 2

Podobne prezentacje
















 do odbiorców odbywa się dwustopniowo przez magazyny hurtowe z przeładunkiem na mniejsze.>")




