Pobierz prezentację
1
urządzenia do pomiaru przesunięć liniowych i kątowych
Wykonał: Daniel Karpiński IVeog

2
Metody pomiaru Metody pomiarowe możemy zasadniczo podzielić na:
Metody cyfrowe zliczanie impulsów Metody analogowe rezystancyjna indukcyjna pojemnościowa

3
Cyfrowe urządzenia do pomiaru przesunięć
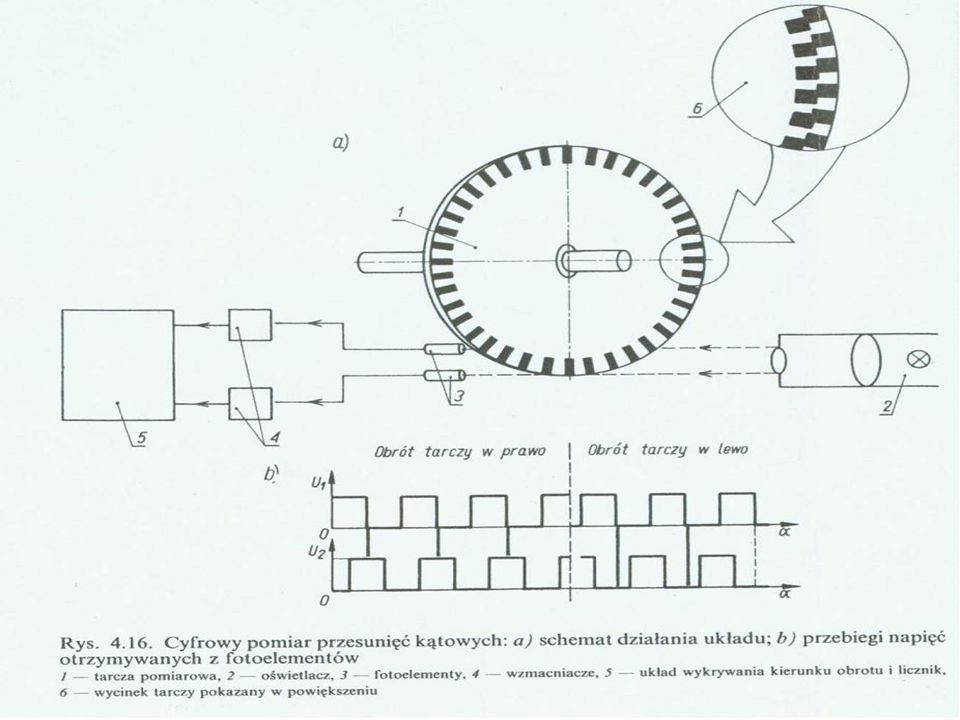
Najłatwiejszym sposobem pomiaru przesunięcia metodą cyfrową jest zliczanie impulsów bądź działek umieszczonych na specjalnej tarczy pomiarowej z wypustkami. Na obwodzie szklanej tarczy naniesione są w równych odstępach nieprzezroczyste działki. Działki powinny być naniesione bardzo dokładnie, gdyż decyduje o dokładności pomiaru. Szerokość nieprzezroczystych działek powinna być taka sama, jak szerokość oddzielających je przezroczystych odstępów. Z jednej strony tarczy umieszczone jest źródło światła, z przeciwnej strony fotoelementy mierzące natężenie przepuszczanego przez tarczę strumienia świetlnego. Sygnały z fotoelementów są wzmacniane i formowane tak, że w efekcie otrzymywane są przebiegi prostokątne

5
Sposób pomiaru Pomiar przesunięcia uzyskuje się w wyniku zliczania impulsów, z których każdy oznacza przejście pod fotoelementem pojedynczej działki. W większości zastosowań mierzone są przesunięcia dwukierunkowe. Otrzymywane impulsy mogą więc oznaczać przesunięcie w kierunku uznanym za dodatni i wtedy powinny być dodawane do zawartości licznika, mogą też oznaczać przesunięcie w kierunku przeciwnym (ujemnym) i wtedy powinny być odejmowane od zawartości licznika.
 i wtedy powinny być odejmowane od zawartości licznika.")
6
Zliczanie Do zliczania impulsów stosowane są liczniki rewersyjne (dwukierunkowe), a impulsom nadawany jest znak plus lub minus, zależnie od kierunku przesunięcia. Do wykrywania kierunku ruchu potrzebne są sygnały z dwu fotoelementów tak ustawionych, aby dostarczały przebiegów przesuniętych w fazie o 90°. Jak widać z rys. 4.16b, sygnał U1 z pierwszego fotoelementu wyprzedza w fazie sygnał U2 z drugiego fotoelementu przy ruchu w kierunku dodatnim, a jest opóźniony w fazie przy ruchu w kierunku ujemnym.
, a impulsom nadawany jest znak plus lub minus, zależnie od kierunku przesunięcia. Do wykrywania kierunku ruchu potrzebne są sygnały z dwu fotoelementów tak ustawionych, aby dostarczały przebiegów przesuniętych w fazie o 90°. Jak widać z rys. 4.16b, sygnał U1 z pierwszego fotoelementu wyprzedza w fazie sygnał U2 z drugiego fotoelementu przy ruchu w kierunku dodatnim, a jest opóźniony w fazie przy ruchu w kierunku ujemnym.")
7
Sposób wykonania Dla uzyskania przebiegów przesuniętych w fazie o 90° fotoelementy są ustawione tak, aby odległość między nimi wynosiła (n + l/4) Δa, gdzie Δa jest miarą łukową odpowiadającą jednej działce, lub fotoelementy są ustawione w linii, a działki na tarczy są wykonane tak, jak na rys.
 Δa, gdzie Δa jest miarą łukową odpowiadającą jednej działce, lub fotoelementy są ustawione w linii, a działki na tarczy są wykonane tak, jak na rys.")
8
Dokładność Dokładność pomiaru przesunięć opisaną metodą zależy od dokładności naniesienia działek pomiarowych i nie może być lepsza niż + 1/4 działki elementarnej. Uzyskiwane są dokładności rzędu pojedynczych minut kątowych. Na przykład przetworniki obrotowo-impulsowe produkowane przez Polskie Zakłady Optyczne dają 400—5000 impulsów na obrót, co odpowiada zdolności rozdzielczej 54'— 4,3' (minut kątowych); dokładność jest nieco mniejsza od zdolności rozdzielczej. Tarcze impulsujące stosowane są do pomiaru przesunięć kątowych, a także — po sprzęgnięciu z dokładną przekładnią śrubową — do pomiaru przesunięć liniowych. W tym ostatnim przypadku dokładność pomiaru jest ograniczona przede wszystkim dokładnością wykonania przekładni śrubowej.
; dokładność jest nieco mniejsza od zdolności rozdzielczej. Tarcze impulsujące stosowane są do pomiaru przesunięć kątowych, a także — po sprzęgnięciu z dokładną przekładnią śrubową — do pomiaru przesunięć liniowych. W tym ostatnim przypadku dokładność pomiaru jest ograniczona przede wszystkim dokładnością wykonania przekładni śrubowej.")
9
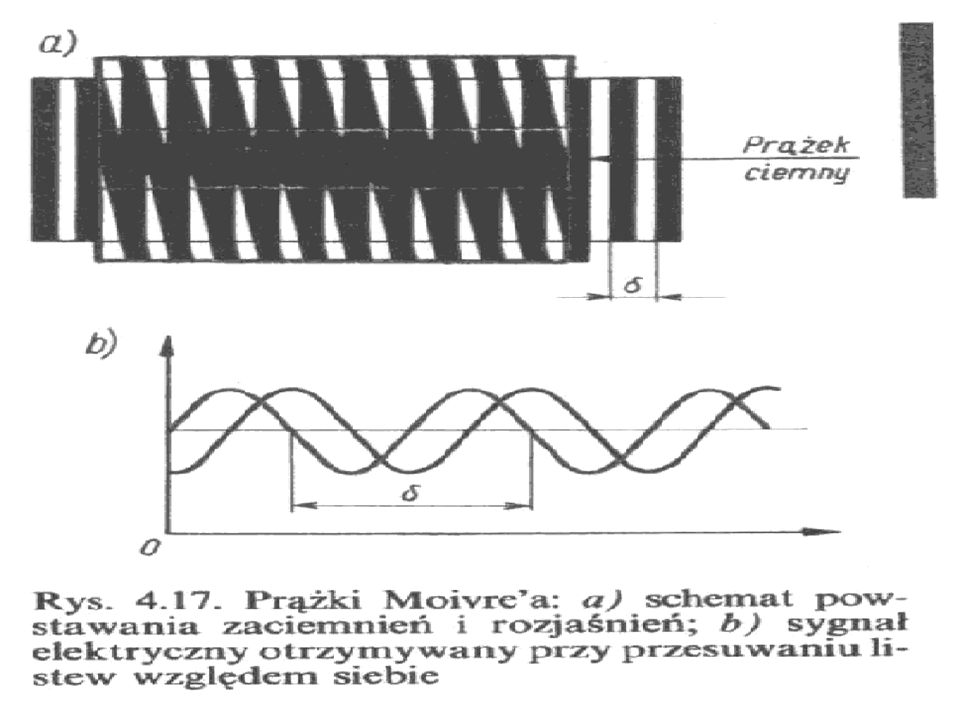
Inna koncepcja Jednym z wcześniej opracowanych cyfrowych urządzeń do pomiaru przesunięć liniowych (budowano również działające na tej samej zasadzie urządzenia do pomiaru przesunięć kątowych) było urządzenie firmy Ferranti wykorzystujące tzw. prążki Moivre'a. Prążki te powstają przy takim złożeniu dwóch listew szklanych z naniesionym szeregiem linii zaczernionych i przezroczystych, aby linie na obu listwach znalazły się pod pewnym niewielkim kątem, przecinając się jeden lub dwa razy na szerokości listew.
 było urządzenie firmy Ferranti wykorzystujące tzw. prążki Moivre a. Prążki te powstają przy takim złożeniu dwóch listew szklanych z naniesionym szeregiem linii zaczernionych i przezroczystych, aby linie na obu listwach znalazły się pod pewnym niewielkim kątem, przecinając się jeden lub dwa razy na szerokości listew.")
10
Prążki Moivre’a W miejscu, w którym linie zaczernione jednej listwy trafiają na linie przezroczyste drugiej listwy, powstanie całkowite zaciemnienie, w miejscu, w którym spotykają się linie przezroczyste obu listew, wystąpi względne rozjaśnienie. W taki sposób przy złożeniu obu listew powstaną wzdłuż nich zaciemnienia i rozjaśnienia (rys. 4.17) nazwane właśnie prążkami Moivre'a, ich liczba zależy od kąta, pod jakim przecinają się linie obu listew. Niezależnie jednak od liczby prążków przy przesunięciu jednej listwy względem drugiej o jedną działkę (odległość między sąsiednimi liniami), prążki przesuną się tak, że w dowolnym punkcie nastąpi pełen cykl zmian jasności. Umieszczając z jednej strony złożonych listew źródło światła, a z drugiej fotoelement, otrzymamy w czasie ruchu listew względem siebie przebieg taki, jak pokazano na rys.
 nazwane właśnie prążkami Moivre a, ich liczba zależy od kąta, pod jakim przecinają się linie obu listew. Niezależnie jednak od liczby prążków przy przesunięciu jednej listwy względem drugiej o jedną działkę (odległość między sąsiednimi liniami), prążki przesuną się tak, że w dowolnym punkcie nastąpi pełen cykl zmian jasności. Umieszczając z jednej strony złożonych listew źródło światła, a z drugiej fotoelement, otrzymamy w czasie ruchu listew względem siebie przebieg taki, jak pokazano na rys.")
12
Rozróżnianie kierunku
Umieszczając drugi fotoelement tak, aby odbierał przebieg przesunięty w fazie o 90° (aby to uzyskać fotoelement ten powinien być przesunięty względem pierwszego o 1/4 odległości między prążkami), uzyskuje się możliwość wykrywania kierunku ruchu.
, uzyskuje się możliwość wykrywania kierunku ruchu.")
13
Podobieństwa i różnice
Podobieństwa wspomnianych urządzeń: Wspólną cechą obu opisanych cyfrowych urządzeń do pomiaru przesunięć jest oparcie pomiaru na zliczaniu dokładnie odmierzonych odcinków. Rozszerza to praktycznie nieograniczenie zakres pomiaru, ale powoduje, że każdy błąd w zliczaniu impulsów wprowadza do wyniku pomiaru trwały błąd, niemożliwy do wykrycia bez wykonania ponownego pomiaru. Wspólną cechą obu układów jest także to, że mierzą one nie położenie, a jego zmianę, czyli przesunięcie. W chwili włączenia urządzenia zaczynamy pomiar od zera.

14
Podobieństwa i różnice
Różnice wspomnianych urządzeń: Między obu układami istnieje jednak poważna różnica: dokładność pomiaru urządzenia z tarczą impulsującą jest limitowana dokładnością naniesienia pojedynczych działek, natomiast dokładność urządzenia wykorzystującego prążki Moivre'a jest określona przez średnią dokładność naniesienia linii. Jeżeli nawet którejś linii nie będzie (sytuacja taka może powstać np. przy łączeniu odcinków listew — zabiegu koniecznym przy dużych zakresach pomiaru), to prążki Moivre'a powstaną, zmieni się tylko nieco ich jasność. Ponieważ w urządzeniu tym fotoelementy zbierają światło z pewnej powierzchni, więc brak jednej linii zmieni ich sygnały wyjściowe tylko o l/n, gdzie n jest liczbą linii na powierzchni kontrolowanej przez fotoelement.
, to prążki Moivre a powstaną, zmieni się tylko nieco ich jasność. Ponieważ w urządzeniu tym fotoelementy zbierają światło z pewnej powierzchni, więc brak jednej linii zmieni ich sygnały wyjściowe tylko o l/n, gdzie n jest liczbą linii na powierzchni kontrolowanej przez fotoelement.")
15
Tarcza kodowa Urządzenia pomiarowe, w których wynik pomiaru otrzymuje się przez zliczenie impulsów, nie mają stałego punktu odniesienia i zawsze istnieje obawa, że wynik pomiaru zostanie nieodwracalnie zniekształcony przez błąd licznika. Jedynym właściwie cyfrowym urządzeniem do pomiaru położenia, które tej wady nie ma, jest tarcza kodowa.

17
Tarcza kodowa Na tarczy tej jest naniesiony szereg pierścieni z występującymi na przemian segmentami przezroczystymi i zaczernionymi. Pierścień najbliższy środka tarczy podzielony jest na dwie części, zawiera więc jeden segment zaczerniony i jeden przezroczysty. Następny pierścień podzielony jest na cztery części i zawiera dwa segmenty zaczernione, rozdzielone dwoma segmentami przezroczystymi. Trzeci pierścień podzielony jest na osiem części, czwarty na szesnaście itd., każdy następny pierścień zawiera dwukrotnie więcej segmentów niż poprzedni. Liczba pierścieni określa liczbę segmentów na zewnętrznym pierścieniu, a zatem dokładność pomiaru. Jak łatwo obliczyć, na zewnętrznym pierścieniu jest 2n segmentów (n — liczba pierścieni). Z tarczą współpracuje zespół fotoelementów, wykrywających, czy nad nimi znajduje się segment zaczerniony czy przezroczysty.
. Z tarczą współpracuje zespół fotoelementów, wykrywających, czy nad nimi znajduje się segment zaczerniony czy przezroczysty.")
18
Tarcza kodowa c.d. Pojawieniu się segmentu zaczernionego odpowiada sygnał, któremu przypisujemy wartość 0, a pojawieniu się segmentu przezroczystego — sygnał, któremu przypisujemy wartość l w dwójkowym systemie liczenia. Każdemu położeniu tarczy kodowej odpowiada więc kombinacja zer i jedynek, czyli liczba dwójkowa, która stanowi miarę położenia kątowego tarczy.

19
Analogowe urządzenia do pomiaru przesunięć - rezystancyjne

23
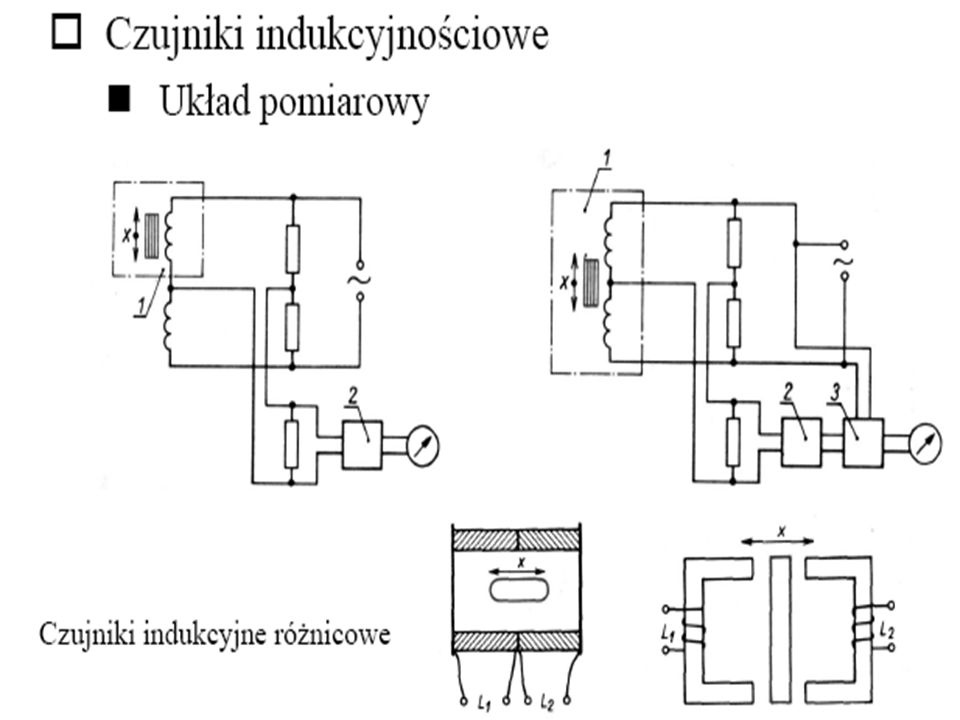
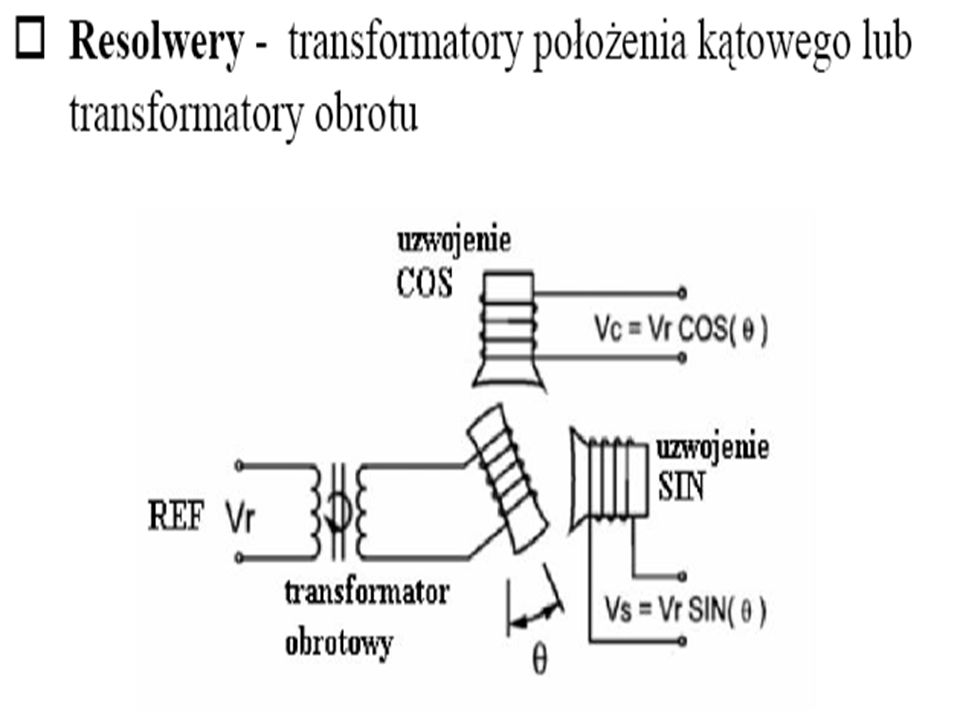
Analogowe urządzenia do pomiaru przesunięć - indukcyjnościowe

25
Pomiar przesunięcia - wiadomości teoretyczne.
W czujniku indukcyjnym przesunięcie części ruchomej czujnika powoduje zmianę jego indukcyjności. Podstawowe jego elementy to: cewka z rdzeniem i ruchoma zwora, od której zależy opór magnetyczny układu. Działanie czujnika jest opisane następującą zależnością: gdzie: L – indukcyjność czujnika [H], z – liczba zwojów, S -powierzchnia nabiegunnika [cm2], δ – szczelina [cm2]. Indukcję magnetyczną można zmieniać przez zmianę δ przy S = const. lub przez zmianę S przy δ = const. lub przez zmianę obu tych parametrów.

26
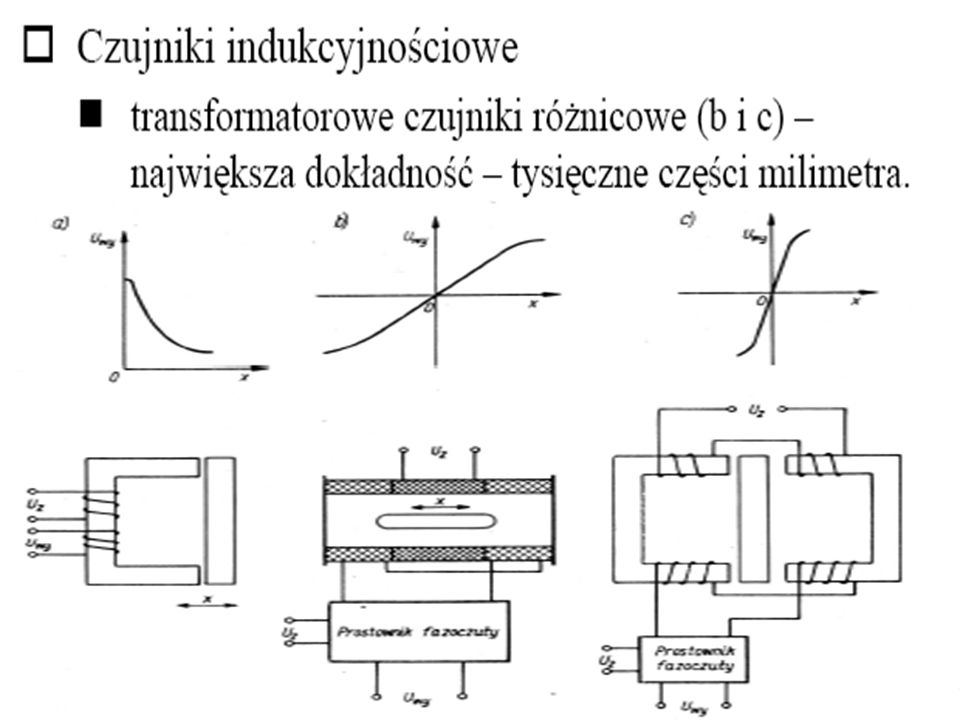
Rys. Czujniki indukcyjne: a) podstawowy, b) różnicowy, c) transformatorowy Podstawowy czujnik indukcyjny zasilany jest prądem zmiennym. W czujniku różnicowym otrzymano większą czułość i uniezależniono się od wpływu warunków temperaturowych i zmian napięcia zasilającego. W czujniku transformatorowym zrealizowane jest oddzielenie galwaniczne obwodu zasilania od obwodu pomiarowego. W zależności od położenia zwory (S, δ) indukuje się w obwodzie pomiarowym odpowiednia SEM.
 podstawowy, b) różnicowy, c) transformatorowy Podstawowy czujnik indukcyjny zasilany jest prądem zmiennym. W czujniku różnicowym otrzymano większą czułość i uniezależniono się od wpływu warunków temperaturowych i zmian napięcia zasilającego. W czujniku transformatorowym zrealizowane jest oddzielenie galwaniczne obwodu zasilania od obwodu pomiarowego. W zależności od położenia zwory (S, δ) indukuje się w obwodzie pomiarowym odpowiednia SEM.")
27
Rys. Schemat układu pomiarowego z czujnikiem różnicowym wykorzystujący zalety czujników różnicowego i transformatorowego z odczytem cyfrowym i wyjściem w postaci znormalizowanego sygnału prądu stałego od 4 mA do 20 mA lub od 0 mA do 10 – 20 mA. Czujniki indukcyjne stosuje się do pomiarów małych odległości np.: ±50 μm, w przypadku pomiarów grubości materiałów ferromagnetycznych, aż do kilkudziesięciu [cm] do pomiaru przesunięć mechanicznych np.: ruchu tłoka w pompach, silnikach czy ruchu listwy paliwowej w silnikach wysokoprężnych itp.

33
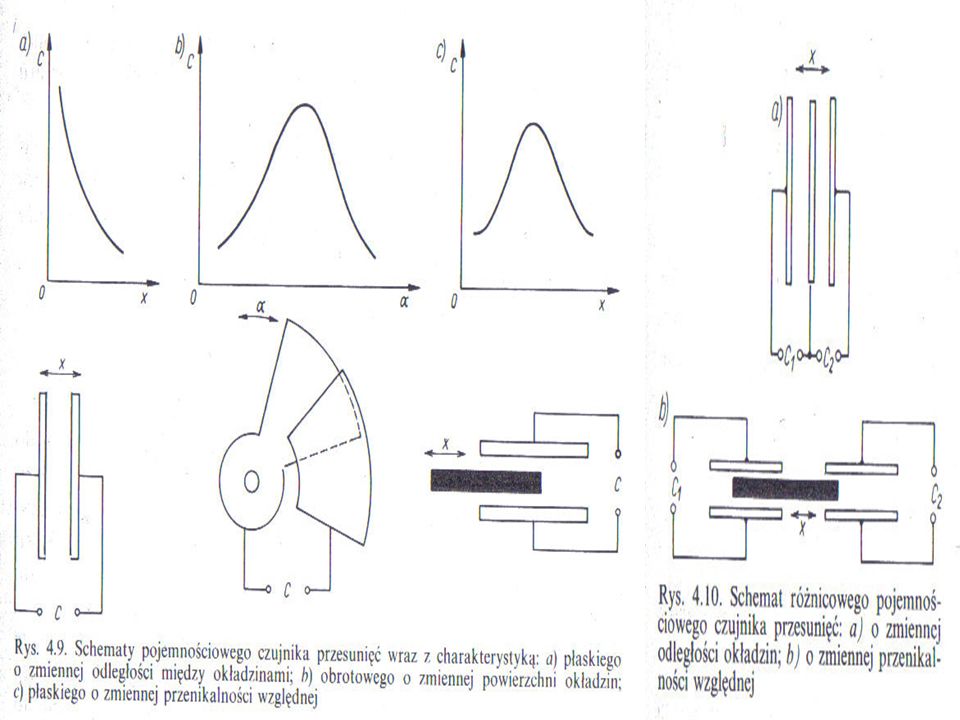
Analogowe urządzenia do pomiaru przesunięć - pojemnościowe






 określona jest jako granica stosunku przyrostu wartości funkcji y do odpowiadającego mu przyrostu zmiennej niezależnej.>")















