Pobierz prezentację
1
Wnioskowanie Mamdani’ego
1. Oblicz stopień spełnienia przesłanki każdej z reguł przez dane wejście: 2. Oblicz zbiory rozmyte wyjścia każdej z reguł dla danego wejścia : 3. Zagreguj zbiory rozmyte wyjścia uzyskując odpowiedź systemu:

2
Wnioskowanie Mamdani’ego – czysty system rozmyty -ilustracja

3
Przykład – model lingwistyczny spalania gazu przy stałym natężeniu dopływu gazu (system SISO)
Mieliśmy: Zbiory rozmyte wejścia Zbiory rozmyte wyjścia Baza reguł: Zbiór rozmyty wejścia - Somewhat Low (raczej niskie)
")
4
Procedura wnioskowania Mamdani’ego
1. Obliczenie stopnia spełnienia przesłanek Wybieramy t-normę MIN dla obliczania stopnie spełnienia przesłanek

5
2. Obliczenie zbiorów rozmytych wyjścia:
Wybieramy t-normę MIN dla obliczania zbiorów rozmytych wyjścia każdej z reguł

6
3. Zagregowanie zbiorów rozmytych wyjścia:
Max

7
Wyostrzanie - defuzyfikacja
Defuzyfikacja zbioru rozmytego B’(y) (całościowej wynikowej funkcji przynależności zbioru reguł i faktu) to operacja określenia „ostrej” wartości y’ reprezentującej ten zbiór (w sposób jak najbardziej sensowny) Najbardziej znane metody defuzyfikacji: metoda środka maksimum (SM) – Middle of Max (MOM), Mean of Maxima (MOM) metoda pierwszego maksimum (PM) – Smallest of Max (SOM), metoda ostatniego maksimum (OM) – Largest of Max (LOM) metoda środka ciężkości (SC) - Centroid of Area (COA), Center of Gravity (COG) metoda środka sum (SS) - Bisector of Area (BOA)
 (całościowej wynikowej funkcji przynależności zbioru reguł i faktu) to operacja określenia „ostrej wartości y’ reprezentującej ten zbiór (w sposób jak najbardziej sensowny) Najbardziej znane metody defuzyfikacji: metoda środka maksimum (SM) – Middle of Max (MOM), Mean of Maxima (MOM) metoda pierwszego maksimum (PM) – Smallest of Max (SOM), metoda ostatniego maksimum (OM) – Largest of Max (LOM) metoda środka ciężkości (SC) - Centroid of Area (COA), Center of Gravity (COG) metoda środka sum (SS) - Bisector of Area (BOA)")
8
Wyostrzanie - defuzyfikacja

9
Metoda środka ciężkości (SC) - Centroid of Area (COA), Center of Gravity (COG)
Metoda środka ciężkości (SC) za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności przyjmuje współrzędną y środka ciężkości powierzchni pod krzywą określoną tą funkcją
 za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności. przyjmuje współrzędną y środka ciężkości powierzchni pod krzywą określoną tą funkcją.")
10
Metoda środka maksimum (SM) - Middle of Max (MOM)
Metoda środka maksimum (SM) za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności przyjmuje współrzędną y będącą wartością średnią wyjść dla których wynikowa funkcja przynależności osiąga maksimum
 za ostrego reprezentanta y’ wynikowego zbioru rozmytego konkluzji B’ zdefiniowanego funkcją przynależności. przyjmuje współrzędną y będącą wartością średnią wyjść dla których wynikowa funkcja przynależności osiąga maksimum.")
11
} Nie wymaga modyfikacji
Przypomnienie - wnioskowanie Mamdani’ego: przypadek SISO 1. Oblicz stopień spełnienia przesłanki każdej z reguł: 2. Oblicz zbiory rozmyte wyjścia każdej z reguł: 3. Zagreguj zbiory rozmyte wyjścia: } Wymaga modyfikacji ! } Nie wymaga modyfikacji } Nie wymaga modyfikacji Rozważana pojedyncza reguła ma postać a wejście systemu pytamy o wyjście systemu

12
Jedna reguła – dwie przesłanki
Fakt: x1 = A1’ i x2 = A2’ Implikacja JEŚLI x1 = A1 I x2 = A2 TO y = B Wniosek y = B’

13
Modyfikacja kroku 1. Rozwijając definicję wnioskowania rozmytego otrzymamy:

14
Dwie reguły – dwie przesłanki
Fakt: x1 = A1’ i x2 = A2’ Implikacja 1 JEŚLI x1 = A11 I x2 = A12 TO y = B1 Wniosek y = B’ Implikacja 2 JEŚLI x1 = A21 I x2 = A22 TO y = B2

15
Modyfikacja kroku 1. dowolna s-norma (t-konorma)
")
24
Agregacja odpowiedzi cząstkowych (s-norma MAX)
")
25
Wyostrzenie – poszukiwanie odpowiedzi ostrej
Skorzystanie ze znajomości obliczania współrzędnych środka ciężkości figur elementarnych

29
Odpowiedź ostra

30
Modele rozmyte mogą być użyte do modelowania obiektu sterowanego i sterownika (regulatora)
Przykład Chcemy zbudować prosty regulator siły ciągu odkurzacza Przyjmujemy początkowo, że regulator powinien określać siłę ciągu w zależności od stopnia zakurzenia powierzchni odkurzanej – regulator: jedno wejście - Surface i jedno wyjście - Force Ustalamy wartości lingwistyczne wejścia: Very Dirty, Dirty, Rather Dirty, Almost Clean, Clean Ustalamy wartości lingwistyczne wyjścia: Very Strong, Strong, Ordinary, Weak, Very Weak

31
Proponujemy tablicę reguł regulatora:
S(urface) F(orce) Wejście: 1, wartości 5 V(ery) D(irty) V(ery) S(trong) Wyjście: 1, wartości 5 D S RD O AC W Pięć reguł C VW Krok następny: zdefiniowanie funkcji przynależności wartości wejścia i wyjścia – zadanie do samodzielnego rozwiązania
 F(orce) Wejście: 1, wartości 5. V(ery) D(irty) V(ery) S(trong) Wyjście: 1, wartości 5. D. S. RD. O. AC. W. Pięć reguł. C. VW. Krok następny: zdefiniowanie funkcji przynależności wartości wejścia i wyjścia – zadanie do samodzielnego rozwiązania.")
32
Modyfikacja regulatora: wprowadzenie drugiego wejścia – Surface Type
Ustalamy wartości lingwistyczne drugiego wejścia: Wood, Tatami, Carpet Proponujemy tablicę reguł regulatora: S Wejście: 2, wartości 1.: 5, wartości 2.: 3 C AC RD D VD ST Wyjście: 1, wartości 5 Wo VW VW W O S F Ta VW W O S VS Piętnaście reguł Ca W O O S VS Krok następny: zdefiniowanie funkcji przynależności wartości wejścia i wyjścia – zadanie do samodzielnego rozwiązania

33
Chcemy zbudować regulator rozmyty stabilizujący prędkość samochodu
Przykład Chcemy zbudować regulator rozmyty stabilizujący prędkość samochodu Przyjmujemy, że regulator powinien określać siłę ciągu w zależności od uchybu prędkości i przyśpieszenia Pożądana prędkość: v0 = const Wejścia regulatora: Wyjście regulatora: Uchyb prędkości Prędkość pożądana Prędkość aktualna Siła ciągu Przyśpieszenie

34
Struktura układu sterowania
Prototypowanie układu sterowania w środowisku MATLAB/Siomulink

35
Ustalamy wartości lingwistyczne wejścia Velocity Error (VE): Negative Error (NE), Zero Error (ZE), Positive Error (PE) Ustalamy wartości lingwistyczne wejścia Acceleration (A): Negative Acceleration (NA), Zero Acceleration (ZA), Positive Acceleration (PA) Definiujemy funkcje przynależności ustalonych wartości wejść
: Negative Acceleration (NA), Zero Acceleration (ZA), Positive Acceleration (PA) Definiujemy funkcje przynależności ustalonych wartości wejść.")
36
Ustalamy wartości lingwistyczne wyjścia Engine Force: Minimum (Min), Normal, Maximum (Max)
Definiujemy funkcje przynależności ustalonych wartości wyjścia

37
Konstruujemy tablicę reguł (model) regulatora rozmytego
Wejście: 2, wartości 1.: 3, wartości 2.: 3 Wyjście: 1, wartości 3 Dziewięć reguł Powierzchnia odpowiedzi regulatora rozmytego

38
Wyniki testowe prototypu regulatora rozmytego

39
Przykład: sterowanie rozmyte z wykorzystaniem systemu Mamdani’ego
System rozmyty Mamdani’ego może być użyty do budowy sterownika opartego na wiedzy użytkownika (eksperta) – jak sterować obiektem Jeżeli zadania sterowania polega na śledzeniu trajektorii zadanej struktura systemu sterowania zwykle ma postać Sterownik rozmyty Obiekt
 – jak sterować obiektem. Jeżeli zadania sterowania polega na śledzeniu trajektorii zadanej struktura systemu sterowania zwykle ma postać. Sterownik rozmyty. Obiekt.")
40
- położenie kulki na belce ( rozumiane jest jako środek belki)
Wstępny projekt sterownika rozmytego: obiekt - belka i kulka Silnik - napęd Belka Kulka Belka Kulka Silnik - napęd Wiedza o obiekcie - położenie kulki na belce ( rozumiane jest jako środek belki) - położenie kątowe belki ( rozumiane jest jako położenie poziome) Wejście sterujące (manipulacyjne) do obiektu belka – kulka: napięcie zasilania silnika p.s. Położenie kątowe belki jest proporcjonalne do napięcia zasilania silnika, czyli
 - położenie kątowe belki ( rozumiane jest jako położenie poziome) Wejście sterujące (manipulacyjne) do obiektu belka – kulka: napięcie zasilania silnika p.s. Położenie kątowe belki jest proporcjonalne do napięcia zasilania silnika, czyli.")
41
Realizacja zadania sterowania
Zadanie sterowania Kształtować napięcie w taki sposób, aby położenie kulki śledziło sygnał wartości zadanej Jeżeli to zadanie, uszczegóławia się do postaci, utrzymać kulkę nieruchomo w środku belki, to trajektoria zadana i wówczas Realizacja zadania sterowania Załóżmy, że ekspert zdecydował, że cel sterowania może być osiągnięty korzystając z wiedzy o położeniu i prędkości kulki Struktura sterownika rozmytego Sterownik rozmyty

42
Wartości (zbiory rozmyte) wejścia sterownika
 wejścia sterownika")
43
Wartości (zbiory rozmyte) wejścia sterownika
 wejścia sterownika")
44
Wartości (zbiory rozmyte) wyjścia sterownika
 wyjścia sterownika")
45
Dlaczego takie dziedziny rozważań. wartości rozmyte
Dlaczego takie dziedziny rozważań? wartości rozmyte? Kształty, zakresy ….. Błąd położenia - Długość belki 1 m Zmiana błędu – oszacowanie prędkości kulki po puszczeniu jej swobodnie z położenia stacjonarnego i przebyciu określonego odcinka; kraniec belki, belka pionowa, 1m – prędkość 4.4m/s Napięcie zasilania – singleton – dogodność przy wyostrzaniu

46
Błąd położenia - - ujemny duży (NL)
Tworzenie bazy reguł Silnik - napęd Błąd położenia ujemny duży (NL) Zmiana błędu położenia ujemny duży (NL) Silnik - napęd Błąd położenia ujemny duży (NL) Zmiana błędu położenia dodatni duży (PL)
 Zmiana błędu położenia - - ujemny duży (NL) Silnik - napęd. Błąd położenia - - ujemny duży (NL) Zmiana błędu położenia - - dodatni duży (PL)")
47
Błąd położenia - - ujemny zerowy (Z)
Silnik - napęd Błąd położenia ujemny zerowy (Z) Zmiana błędu położenia ujemna mała (NS)
 Zmiana błędu położenia - - ujemna mała (NS)")
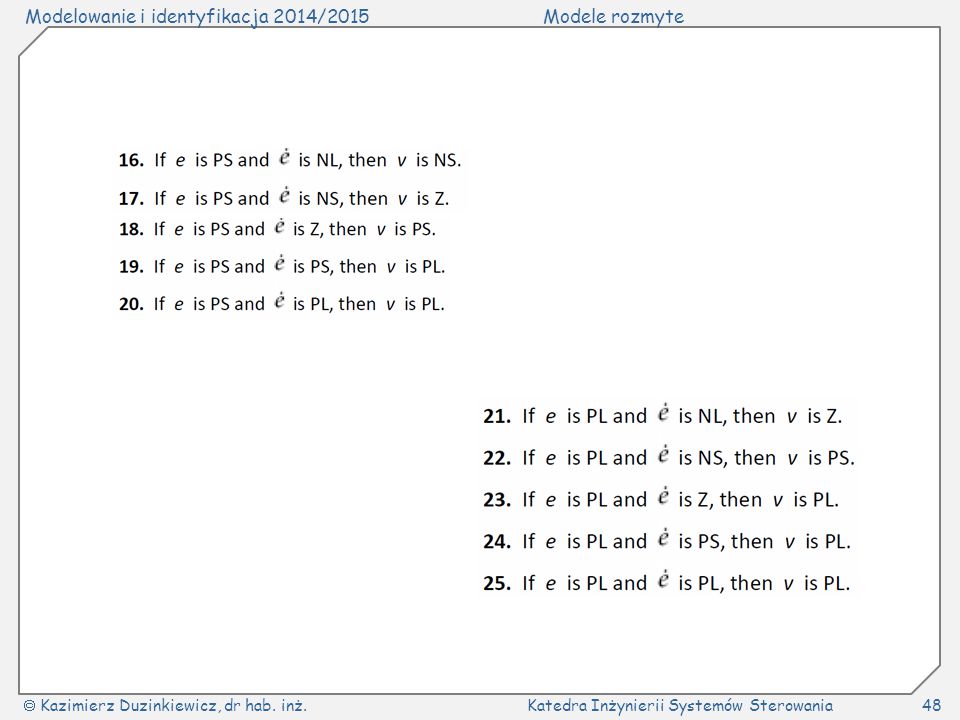
49
Macierz reguł Tablica reguł

50
Wnioskowanie – uproszczone Mamdani’ego, t – norma PROD
Np. Reguła 1 – stopień spełnienia przesłanki reguły Np. niech w danej chwili t:

51
Dalsze niezerowe stopnie spełnienia przesłanek:

52
Odpowiedzi cząstkowe:
Reguła 9: Reguła 10:

53
Odpowiedzi cząstkowe:
Reguła 14: Reguła 15:

54
Odpowiedź całkowita: Wyostrzanie – metoda środka ciężkości (COG)
")
55
Dla eksperymentu symulacyjnego:
Wyniki symulacji: Dla eksperymentu symulacyjnego: Czas t (s) Położenie kulki (m)
 Położenie kulki (m)")
56
Statyczny sterownik rozmyty
Strojenie dla poprawy jakości działania przez strojenie skalowalnych wzmocnień (wag) Układ sterowania Sterownik rozmyty Belka i kulka Nowa struktura sterownika Statyczny sterownik rozmyty
 Układ sterowania. Sterownik rozmyty. Belka i kulka. Nowa struktura sterownika. Statyczny sterownik rozmyty.")
57
Położenie kulki (m) Czas t (s)
 Czas t (s)")
58
Czas t (s) Położenie kulki (m)
 Położenie kulki (m)")
59
Czas t (s) Położenie kulki (m)
 Położenie kulki (m)")
60
Położenie kątowe belki (rad)
Czas t (s) Położenie kątowe belki (rad) Położenie kulki (m)
 Położenie kątowe belki (rad) Położenie kulki (m)")
61
Wpływ kształtu funkcji przynależności
Zastosujemy funkcję Gaussa Wartości (zbiory rozmyte) wejścia sterownika
 wejścia sterownika.")
62
Wartości (zbiory rozmyte) wejścia sterownika
 wejścia sterownika")
63
Wnioskowanie – uproszczone Mamdani’ego, t – norma PROD

64
Próg „odpalenia” reguły: 0.1
Stopień spełnienia przesłanek reguł: Ostre wyjście sterownika

65
Charakterystyki wejście – wyjście badanych sterowników

66
Dziękuję za uczestnictwo w wykładzie i uwagę
Koniec materiału prezentowanego podczas wykładu Dziękuję za uczestnictwo w wykładzie i uwagę












 w których wykorzystujemy zbiory rozmyte i właściwy im aparat matematyczny.>")









