Pobierz prezentację
1
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ
SYSTEMY GPS

2
PLAN PREZENTACJI Układy odniesienia Systemy GPS, GLONASS, GALILEO Nawigacja, systemy SBAS Systemy ASG w Polsce

3
RÓŻNE ELIPSOIDY

4
UKŁAD ODNIESIENIA (DATUM)
")
5
WSPÓŁRZĘDNE W RÓŻNYCH UKŁADACH ODNIESIENIA

6
JEDNOSTKI KĄTOWE 1 RADIAN = kąt środkowy oparty na łuku okręgu o długości równej promieniowi. Stopniowa i gradowa 2π rad = stopnie = grad 1 rad = 360o /2π = 400g /2π 1 rad = o = 57o 17’ 44 ”.8 1 rad = g = 63 g 66 c 19. cc 77

7
LOKALIZACJA PUNKTÓW W POZIOMIE
Układ GCS jest jednoznacznie określony przez: • kątową miarę położenia (długość i szerokość geograficzną), • południk zerowy • układ odniesienia – rodzaj elipsoidy, – położenie elipsoidy względem środka cieżkości geoidy, lub innych punktów Południk zerowy – od 1884 r. przechodzacy przez Obserwatorium w Greenwich w Anglii
, • południk zerowy. • układ odniesienia. – rodzaj elipsoidy, – położenie elipsoidy względem środka cieżkości geoidy, lub innych. punktów. Południk zerowy – od 1884 r. przechodzacy przez Obserwatorium w Greenwich w Anglii.")
8
SYSTEM ODNIESIENIA Układ współrzędnych nie zawiera informacji o jego orientacji względem bryły ziemskiej, •Układy współrzędnych oraz parametry opisujące ich orientacje względem bryły ziemskiej zwane są geodezyjnymi systemami odniesienia, •Tak więc system odniesienia stanowi zbiór zaleceń i ustaleń oraz stałych wraz z opisem modeli niezbędnych do zdefiniowania początku, skali i orientacji osi układów współrzędnych w bryle ziemskiej oraz ich zmienności w czasie.

9
SYSTEM ODNIESIENIA Definicja –kartezjański trójwymiarowy Początek układu jest umieszczony w środku ciężkości mas Ziemi, oś Z prawie pokrywa się z osią obrotu Ziemi Definicja –elipsoidalny układ -parametry opisujące jego orientację względem bryły ziemskiej punkt początkowy P, jego szerokość ϕP, długośćλP, azymut linii αPB, parametry elipsoidy a oraz b, odstęp geoidy od elipsoidy NP

10
SYSTEM ODNIESIENIA punkt początkowy P, jego szerokość ϕP, długość λP, azymut linii αPB, parametry elipsoidy a oraz b, odstęp geoidy od elipsoidy NP

11
UKŁAD ODNIESIENIA Układ odniesienia stanowi praktyczną realizację systemu odniesienia w przypadku geodezji klasycznej – jest określony przez liczbowe wartości sześciu parametrów, W przypadku geodezji współczesnej (satelitarnej) przez współrzędne określonych stacji naziemnych. Na świecie istnieje wiele układów odniesienia WGS84 EUREF
 przez współrzędne określonych stacji naziemnych. Na świecie istnieje wiele układów odniesienia. WGS84. EUREF.")
12
UKŁAD ODNIESIENIA PUŁKOWO 42

13
WORLS GEODETIC SYSTEM 1972 (WGS-72)
Swiatowy System Odniesienia WGS72 był trzecim geocentrycznym układem odniesienia opracowanym przez US DMA Agencje Kartograficzna Ministerstwa Obrony Stanów Zjednoczonych Ameryki Północnej - poprzednie wersje WGS60 I WGS66. Przed 27 stycznia 1989 roku był używany przez GPS i Dopplerowski system TRANSIT. Praktyczna jego realizacja nastepowała poprzez sieć stacji śledzących systemu TRANSIT (TRANET).
.")
14
WORLD GEODETIC SYSTEM 1984 (WGS-84)
Układ odniesienia WGS84 był początkowo oparty o współrzędne satelitarne uzyskane tylko z pomiarów dopplerowskich (system TRANSIT) i bazował na układzie WGS72, który został opracowany dla potrzeb systemu TRANSIT. Podejscie to pozwoliło na stworzenie globalnie jednorodnego układu odniesienia o dokładności rzędu 1-2 m Współrzedne dziesieciu stacji sledzacych systemu GPS zostały poprawione przez użycie kilkutygodniowych obserwacji GPS z globalnej sieci IGS (22 stacje), wykorzystano w procesie wyznaczania współrzędnych, jak równie poprawienia pokładowych orbit satelitarnych. W opracowaniu wyników pomiarów przyjeto standardy zgodne z zaleceniami IERS. Wynikiem prac był nowy poprawiony układ WGS84(G730) – co odnosi się do 730-go tygodnia GPS. Nowy układ charakteryzuje się dokładnością 10cm w skali globalnej Od poczatku 1994r DMA (obecnie NIMA) wykorzystuje układ WGS84(G730) do obliczania orbit satelitów GPS (efemeryd pokładowych).
 i bazował na układzie WGS72, który został opracowany dla potrzeb systemu TRANSIT. Podejscie to pozwoliło na stworzenie globalnie jednorodnego układu odniesienia o dokładności rzędu 1-2 m. Współrzedne dziesieciu stacji sledzacych systemu GPS zostały poprawione przez użycie kilkutygodniowych obserwacji GPS z globalnej sieci IGS (22 stacje), wykorzystano w procesie wyznaczania współrzędnych, jak równie poprawienia pokładowych orbit satelitarnych. W opracowaniu wyników pomiarów przyjeto standardy zgodne z zaleceniami IERS. Wynikiem prac był nowy poprawiony układ WGS84(G730) – co odnosi się do 730-go tygodnia GPS. Nowy układ charakteryzuje się dokładnością 10cm w skali globalnej. Od poczatku 1994r DMA (obecnie NIMA) wykorzystuje układ WGS84(G730) do obliczania orbit satelitów GPS (efemeryd pokładowych).")
15
Geodetic System 1980 (GRS-80)
Geodezyjny System Odniesienia GRS’80 został przyjety na XIV Zgromadzeniu Generalnym Miedzynarodowej Unii Geodezji i Geofizyki (IUGG) w grudniu 1979 roku w Canberze. Jego elementami były parametry geocentrycznej elipsoidy: a, GM i J2 oraz predkość kątowa Ziemi. Przyjęto, że mała półoś elipsoidy odniesienia systemu GRS’80 będzie równoległa do osi CIO, a płaszczyzna południka zerowego bedzie równoległa do południka zerowego średniego Obserwatorium BIH. Praktyczną realizację tak przyjętego układu współrzędnych można oszacować na około 10 cm.
 w grudniu 1979 roku w Canberze. Jego elementami były parametry geocentrycznej elipsoidy: a, GM i J2 oraz. predkość kątowa Ziemi. Przyjęto, że mała półoś elipsoidy odniesienia systemu GRS’80 będzie równoległa do osi CIO, a płaszczyzna południka zerowego bedzie równoległa do południka zerowego średniego Obserwatorium BIH. Praktyczną realizację tak przyjętego układu współrzędnych można oszacować. na około 10 cm.")
16
ELIPSOIDA ZIEMSKA Obecnie obowiązuje Geodezyjny System Odniesienia 1980 (GRS’80 –Geodetic Reference System 1980) przyjęty na XVII Zgromadzeni Generalnym Międzynarodowej Unii Geodezji i Geofizyki (IUGG) w Canberze w grudniu 1997 roku. Stosowana rezolucja zaleca aby: • równikowy promień Ziemi: a = m • geocentryczna stała grawitacji Ziemi (z atmosferą) dynamiczny współczynnik kształtu Ziemi, wyłączając stałą deformacje pływową • kątowa prędkość Ziemi: f –spłaszczenie elipsoidy kwadrat mimośrodu a –duża półoś Równanie geocentrycznej elipsoidy obrotowej w układzie współrzędnych prostokątnych ma postać: Kwadrat mimośrodu:
 przyjęty na XVII Zgromadzeni Generalnym Międzynarodowej Unii Geodezji i Geofizyki (IUGG) w Canberze w grudniu 1997 roku. Stosowana rezolucja zaleca aby: • równikowy promień Ziemi: a = m. • geocentryczna stała grawitacji Ziemi (z atmosferą) dynamiczny współczynnik kształtu Ziemi, wyłączając stałą deformacje pływową. • kątowa prędkość Ziemi: f –spłaszczenie elipsoidy. kwadrat mimośrodu. a –duża półoś. Równanie geocentrycznej elipsoidy obrotowej w układzie współrzędnych prostokątnych ma postać: Kwadrat mimośrodu:")
17
Geodezyjny System Odniesienia GRS’80

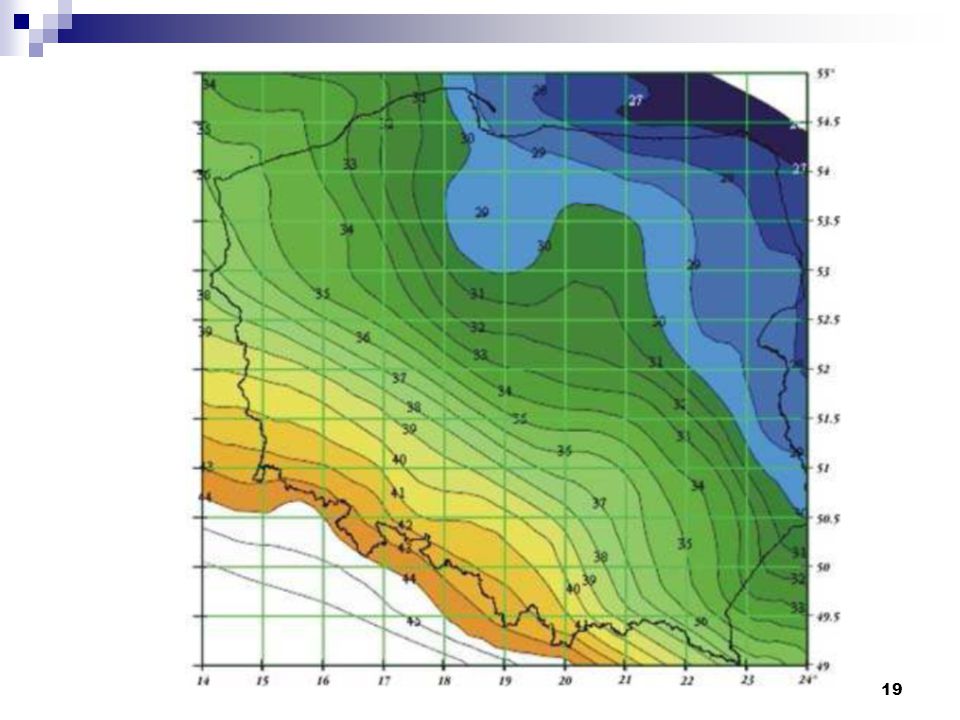
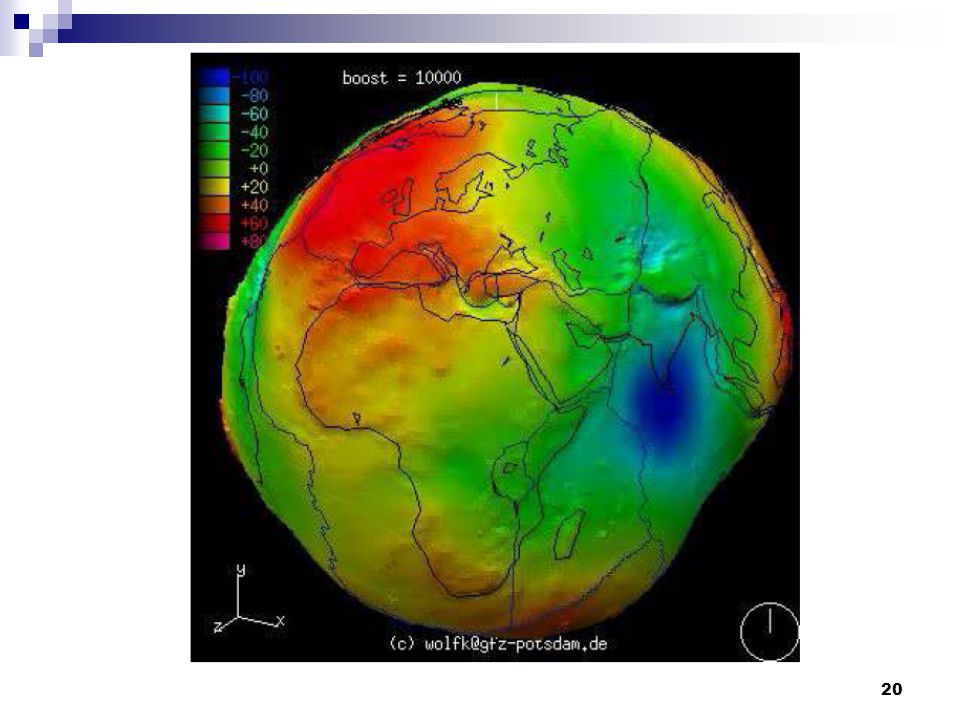
18
Geodezyjny System Odniesienia GRS’80

21
UKŁADY ODNIESIENIA

22
SŁUŻBA IERS – ROLA W TWORZENIU I KONSERWACJI ZIEMSKICH UKLADÓW ODNIESIENIA
Międzynarodowa Służba Ruchu Obrotowego Ziemi (IERS) została powołana przez Międzynarodową Unię Astronomiczna (IAU) i Miedzynarodowa Unię Geodezji i Geofizyki w 1987 roku. W 2003 roku została przemianowana na Miedzynarodowa Słube Ruchu Obrotowego Ziemi i Systemów Odniesienia (International Earth Rotation and Reference Systems Service). Do zadań należą: •Definicja Międzynarodowego Niebieskiego Systemu Odniesienia (ICRS) i jego realizacja w postaci układu współrzędnych (ICRF). •Definicja Miedzynarodowego Ziemskiego Systemu Odniesienia (ITRS) i jego realizacja w postaci układu współrzędnych (ITRF). •Wyznaczenie parametrów orientacji Ziemi (EOP) i ich zmian dla zapewnienia parametrów transformacji pomiędzy ICR i ITRF. •Analiza danych geofizycznych dla interpretacji zmian ICRF, ITRF, EOP i ich modelowanie. •Standardy, stałe i modele (konwencje).
 została powołana przez Międzynarodową Unię Astronomiczna (IAU) i Miedzynarodowa Unię Geodezji i Geofizyki w 1987 roku. W 2003 roku została przemianowana na Miedzynarodowa Słube Ruchu. Obrotowego Ziemi i Systemów Odniesienia (International Earth Rotation and Reference Systems Service). Do zadań należą: •Definicja Międzynarodowego Niebieskiego Systemu Odniesienia (ICRS) i jego realizacja w postaci układu współrzędnych (ICRF). •Definicja Miedzynarodowego Ziemskiego Systemu Odniesienia (ITRS) i jego realizacja w postaci układu współrzędnych (ITRF). •Wyznaczenie parametrów orientacji Ziemi (EOP) i ich zmian dla zapewnienia parametrów transformacji pomiędzy ICR i ITRF. •Analiza danych geofizycznych dla interpretacji zmian ICRF, ITRF, EOP i ich modelowanie. •Standardy, stałe i modele (konwencje).")
23
SŁUŻBA IERS – ROLA W TWORZENIU I KONSERWACJI ZIEMSKICH UKLADÓW ODNIESIENIA
Miedzynarodowa Słuba Ruchu Obrotowego Ziemi i Systemów Odniesienia (International Earth Rotation and Reference Systems Service) posiada nastepujące służby obserwacyjne i opracowania danych dla poszczególnych technik: o Międzynarodowa Służba GPS (IGS) o Międzynarodowa Służba Pomiarów Laserowych Odległości (ILRS) o Międzynarodowa Służba VLBI (IVS) o Międzynarodowa Służba DORIS (IDS)
 posiada nastepujące służby obserwacyjne i opracowania danych dla poszczególnych technik: o Międzynarodowa Służba GPS (IGS) o Międzynarodowa Służba Pomiarów Laserowych Odległości (ILRS) o Międzynarodowa Służba VLBI (IVS) o Międzynarodowa Służba DORIS (IDS)")
24
International Earth Rotation Service
IGS - International GNNS Service - zbiera i analizuje dane kilkuset stacji permanentnych GPS, ILRS - International Laser Ranging Service - opracowuje dane zebrane za pomocą pomiarów odległości do satelitów techniką laserową, LLR - Lunar Laser Ranging - wykorzystuje dane laserowych pomiarów odległości do Księżyca, VLBI - Very Long Base Interferometry - sieć radioteleskopów obserwujących dalekie radioźródła techniką interferometrii, DORIS - Doppler Orbitography by Radiopositioning Integrated on Satellite - francuski system kontroli orbit.

25
ITRF’88 – ITRF’2000 przeglad parametrów transformacji i ich skutki praktyczne

26
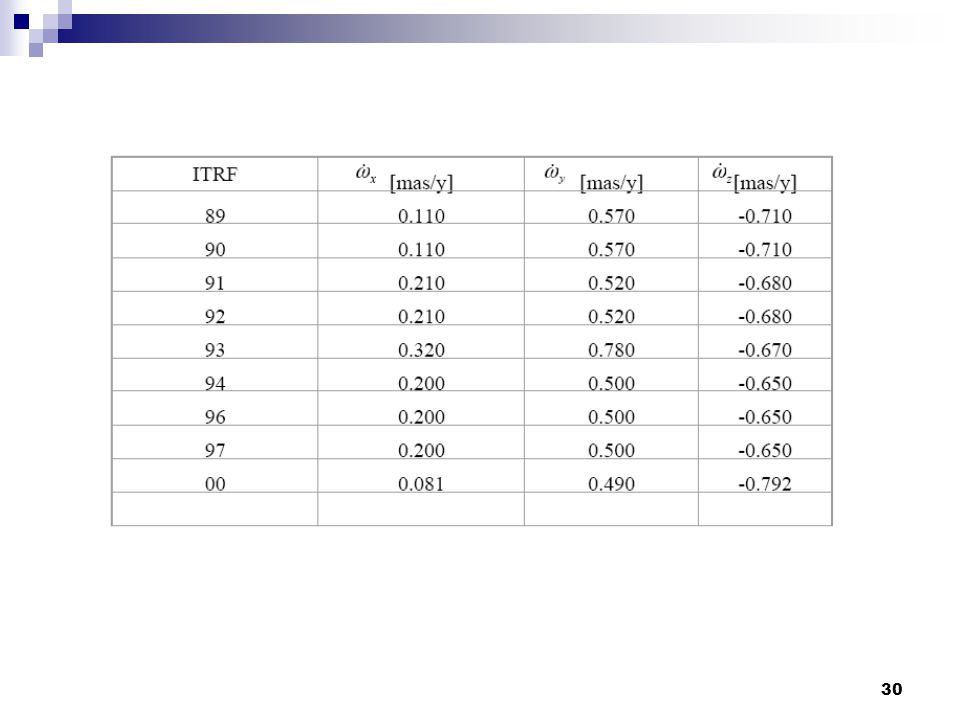
PARAMETRY TRANSFORMACJI

27
PARAMETRY TRANSFORMACJI

28
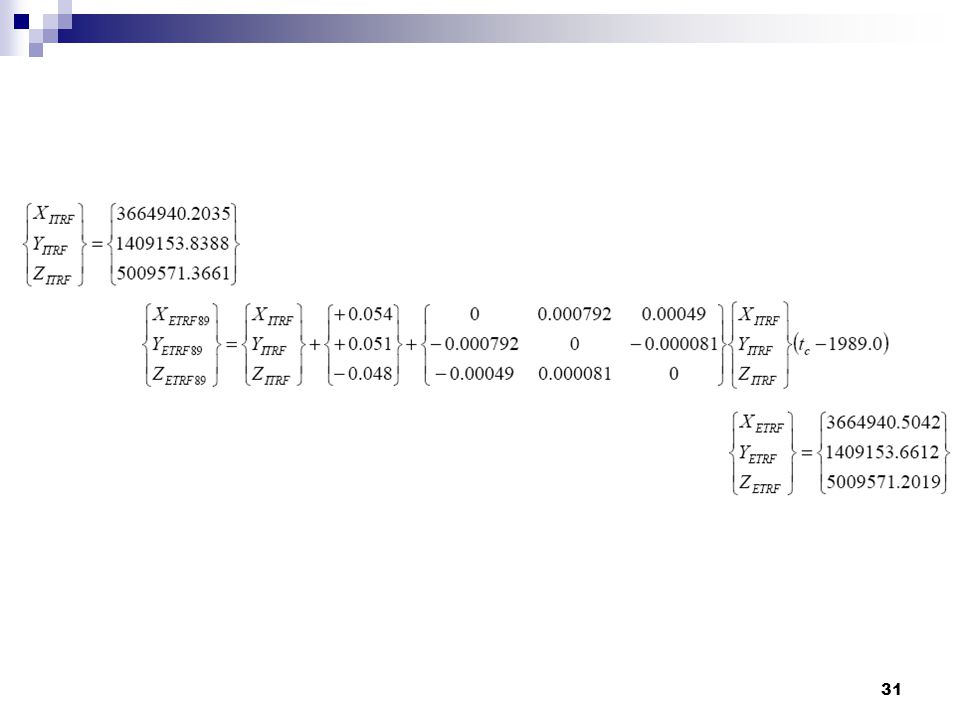
ETRF-89 JAKO PODZBIÓR UKŁADU ITRF

29
ETRF-89 JAKO PODZBIÓR UKŁADU ITRF

32
NIESATELITARNE SYSTEMY ODNIESIENIA W POLSCE
Układ Borowa Góra 1925 (BG1925), określany w zagranicznych zródłach jako PND1925 (Polish National Datum) powstał w wyniku przyłożenia elipsoidy Bessel’1841 do Geoidy w Borowej Górze. Orientacji elipsoidy dokonano przy pomocy azymutu na wieżę w Modlinie. Przyjęto następujące współrzedne tego punktu (szerokość i długość geograficzną wynikającą z pomiarów astronomicznych): B = 52o28’32.85” L = 21o02’12.12” W Polsce, podobnie jak w innych państwach byłego układu warszawskiego, obowiazywała od roku 1952 elipsoida KRASOWSKIEGO z punktem przyłożenia do geoidy w Pułkowie Do połowy lat 60 tych obowiazywał w Polsce układ współrzędnych zwany krótko „1942”.
, określany w zagranicznych zródłach jako PND1925 (Polish National Datum) powstał w wyniku przyłożenia elipsoidy Bessel’1841 do Geoidy w Borowej Górze. Orientacji elipsoidy dokonano przy pomocy azymutu na wieżę w Modlinie. Przyjęto następujące współrzedne tego punktu (szerokość i długość geograficzną wynikającą z pomiarów astronomicznych): B = 52o28’32.85 L = 21o02’12.12 W Polsce, podobnie jak w innych państwach byłego układu warszawskiego, obowiazywała od roku 1952 elipsoida KRASOWSKIEGO z punktem przyłożenia do geoidy w Pułkowie. Do połowy lat 60 tych obowiazywał w Polsce układ współrzędnych zwany krótko „")
33
1899 –Powołanie przez IAG Międzynarodowej Służby Szerokości (ILS)
1900 –Rozpoczęcie wykonywania obserwacji przez ILS1912 – Powołanie Międzynarodowego Biura Czasu (BIH) 1962 –Powołanie Międzynarodowej Służby Ruchów Bieguna (IPMS) 1966 –Wprowadzenie ziemskiego układu odniesienia Standard EarthIII 1967 –Zdefiniowanie początku umownego układu współrzędnych ziemskich CIO 1967 –Przyjęcie przez IUGG geodezyjnego systemu odniesienia GRS67 1968 –Wprowadzenie systemu pozycji bieguna i czasu UT dystrybuowanego przez BIH –układ odniesienia BIH 1972 –Wprowadzenie ziemskiego układu odniesienia WGS72 1973 –Wprowadzenie satelitarnych obserwacji Dopplerowskich do wyznaczeń pozycji bieguna prowadzonych przez BIH początek końca ery obserwacji astrometrycznych 1979 –Przyjęcie przez IUGG geodezyjnego systemu odniesienia GRS80
 1962 –Powołanie Międzynarodowej Służby Ruchów Bieguna (IPMS) 1966 –Wprowadzenie ziemskiego układu odniesienia Standard EarthIII –Zdefiniowanie początku umownego układu współrzędnych ziemskich CIO –Przyjęcie przez IUGG geodezyjnego systemu odniesienia GRS –Wprowadzenie systemu pozycji bieguna i czasu UT dystrybuowanego przez BIH –układ odniesienia BIH –Wprowadzenie ziemskiego układu odniesienia WGS –Wprowadzenie satelitarnych obserwacji Dopplerowskich do wyznaczeń pozycji bieguna prowadzonych przez BIH początek końca ery obserwacji astrometrycznych –Przyjęcie przez IUGG geodezyjnego systemu odniesienia GRS80.")
34
1979 –Wprowadzenie obserwacji laserowych satelity LAGEOS i LLRdo wyznaczeń pozycji bieguna i UT
1980 –Początek kampanii MERIT (Monitoring of the Earth Rotation and Intercomparison of theTechniques) –Właściwa kampania MERIT 1984 –Wprowadzenie ziemskiego układu odniesienia WGS84 i BIH (BTS84) 1984 –Wprowadzenie ziemskiego systemu odniesienia BIH (BTS84)(po raz pierwszy zastosowano model prędkości AM0-2) 1989 –Rozpoczęcie pracy przez służbę IERS wykorzystującą obserwacje laserowe i VLBI do wyznaczenia parametrów ruchu obrotowego Ziemi 1991 –Zdefiniowanie przez IUGG umownego ziemskiego systemu odniesienia CTRS. Monitorowanemu przez IERS systemowi CTRS nadano nazwę Międzynarodowego Ziemskiego Systemu Odniesienia ITRS 1993 –Powołanie International GPS Service(IGS) –(od 2004 International Earth Rotation and Reference Systems Service) 1994 –Wprowadzenie obserwacji DORIS do wyznaczeń pozycji bieguna
 –Właściwa kampania MERIT –Wprowadzenie ziemskiego układu odniesienia WGS84 i BIH (BTS84) 1984 –Wprowadzenie ziemskiego systemu odniesienia BIH (BTS84)(po raz pierwszy zastosowano model prędkości AM0-2) 1989 –Rozpoczęcie pracy przez służbę IERS wykorzystującą obserwacje laserowe i VLBI do wyznaczenia parametrów ruchu obrotowego Ziemi –Zdefiniowanie przez IUGG umownego ziemskiego systemu odniesienia CTRS. Monitorowanemu przez IERS systemowi CTRS nadano nazwę Międzynarodowego Ziemskiego Systemu Odniesienia ITRS –Powołanie International GPS Service(IGS) –(od 2004 International Earth Rotation and Reference Systems Service) 1994 –Wprowadzenie obserwacji DORIS do wyznaczeń pozycji bieguna.")
35
LITERATURA Prof. dr hab. Adam Łyszkowicz, UWM w Olsztynie, WYKŁADY
XXIII ZGROMADZENIE GENERALNE MIEDZYNARODOWEJ UNII GEODEZJI I GEOFIZYKI Sapporo, 30 czerwca – 11 lipca 2003 ZIEMSKIE GLOBALNE SYSTEMY ODNIESIENIA I ICH REALIZACJE Workshop: „NOWE OBOWIAZUJACE SYSTEMY WSPÓŁRZEDNYCH ZIEMSKICH I NIEBIESKICH ORAZ ICH WZAJEMNE RELACJE” Warszawa, maja 2004 roku Jerzy B. Rogowski, Mariusz Figurski Geodezja wyższa i astronomia geodezyjna, Prof. dr hab. inż. Jerzy B. Rogowski, Dr inż. Magdalena Kłęk Wykład – Mapa cyfrowa, dr Katarzyna Bradtke, dr Jacek Urbanski Geodezja, WYKŁAD, Pomiary szczegółowe 1, Katedra Geodezji im. K. Weigla

36
NAWIGACJA Zadaniem nawigacji jest określenie pozycji i parametrów ruchu (prędkości, kursu) jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Do jednoznacznego określenia współrzędnych położenia względem punktów orientacyjnych mogą być użyte: · pomiar dwóch kątów (zasada goniometrii), · pomiar dwóch odległości, (w przypadku systemów z radiolatarniami umieszczonymi na orbicie okołoziemskiej wymagany jest pomiar odległości do minimum trzech radiolatarni ), · pomiar kąta i odległości (współrzędnych biegunowych), · pomiar stosunku odległości statku powietrznego do co najmniej dwóch par radiolatarni (zasada systemów hiperbolicznych), · zliczenie zmian współrzędnych obiektu, począwszy od punktu o znanych współrzędnych. Nawigacja lądowa, Nawigacja lotnicza i morska, Systemy lokalizacji pojazdów i osób Systemy ratownictwa Zastosowania specjalne
 jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Do jednoznacznego określenia współrzędnych położenia względem punktów orientacyjnych mogą być użyte: · pomiar dwóch kątów (zasada goniometrii), · pomiar dwóch odległości, (w przypadku systemów z radiolatarniami umieszczonymi na orbicie okołoziemskiej wymagany jest pomiar odległości do minimum trzech radiolatarni ), · pomiar kąta i odległości (współrzędnych biegunowych), · pomiar stosunku odległości statku powietrznego do co najmniej dwóch par radiolatarni (zasada systemów hiperbolicznych), · zliczenie zmian współrzędnych obiektu, począwszy od punktu o znanych współrzędnych. Nawigacja lądowa, Nawigacja lotnicza i morska, Systemy lokalizacji pojazdów i osób. Systemy ratownictwa. Zastosowania specjalne.")
37
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ SBAS

38
SYSTEM WASS SIEĆ STACJI ODNIESIENIA SATELITY GNSS
SATELITY GEOSTACJONARNE STACJE TELEKOMUNIKACYJNE

39
STACJA ODNIESIENIA SYSTEM WASS

40
SYSTEM WAAS GENEROWANIE KOREKT

41
SBAS – STAN OBECNY

42
SBAS – STAN OBECNY

43
SBAS – STAN OBECNY

44
SBAS – KIERUNKI ROZWOJU
GAGAN

45
EGNOS – ARCHITEKTURA SYSTEMU

46
EGNOS – ARCHITEKTURA SYSTEMU
GEO GLONASS AOR-E IOR-W ARTEMIS GPS RIMS NLES (x 6) EWAN MCC 1 MCC 2 MCC 3 MCC 4 PACF ASQF
 EWAN. MCC 1. MCC 2. MCC 3. MCC 4. PACF. ASQF.")
47
EGNOS – SEGMENTY SYSTEMU
SATELITY GEOSTACJONARNE

48
EGNOS – SEGMENTY SYSTEMU
Navigation Land Earth Stations Master Control Centres

49
EGNOS – SEGMENTY SYSTEMU
Ranging and Integrity Monitoring Stations

50
Lisbon Toulouse Rome Brussels Paris HNSE 95% 1.2 m 0.9 m 1.1 m 0.8 m
EGNOS – DOKŁADNOŚĆ (2004) Lisbon Toulouse Rome Brussels Paris HNSE 95% 1.2 m 0.9 m 1.1 m 0.8 m 1.0 m VNSE 1.7 m 1.4 m 1.3m
 Lisbon. Toulouse. Rome. Brussels. Paris. HNSE. 95% 1.2 m. 0.9 m. 1.1 m. 0.8 m. 1.0 m. VNSE. 1.7 m. 1.4 m. 1.3m.")
51
SYSTEM LASS SATELITY GNSS, PSEUDOSATELITY NAZIEMNE, STACJE REFERENCYJNE

52
SYSTEM EGNOS W celu polepszenia dokładności systemu stworzono różnicowy system korekcji pomiarów GPS składający się naziemnych stacji referencyjnych, które przesyłają poprawki do trzech satelitów geostacjonarnych EGNOS. Za pośrednictwem tych satelitów, sygnał trafia do odbiorników GPS pozwalając na skorygowanie pomiaru dokonanego na podstawie danych z satelitów GPS. System występuje w trzech kompatybilnych ze sobą wersjach regionalnych : WAAS w Ameryce, EGNOS w Europie oraz japoński MSAS w Azji. EGNOS pozwala na zmniejszenie błędu pomiaru pozycji z ok.10 m do poniżej 3 metrów w odbiornikach przystosowanych do odbioru tego sygnału. Dostępność sygnału EGNOS jest często ograniczana przez przeszkody terenowe ze względu na „niskie” umiejscowienie satelity (kierunek południowy ok. 22 st. nad horyzontem).
.")
53
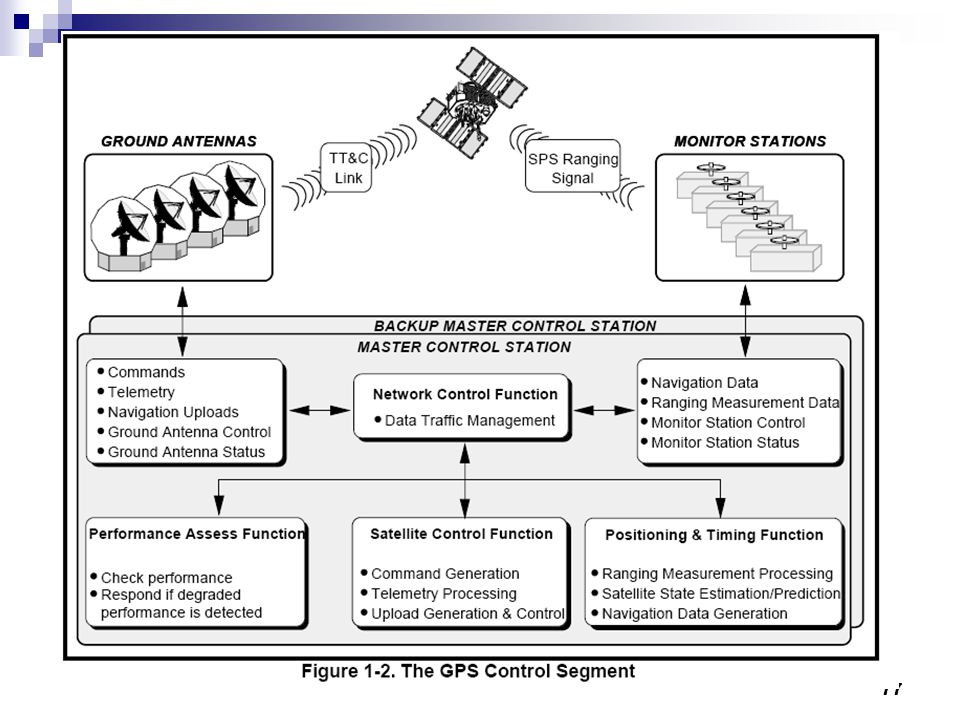
GLOBALNY SYSTEM POZYCJONOWANIA
Zawiera trzy moduły: - segmentu kosmicznego – 27 satelitów okrążających Ziemię - segmentu kontroli – stacji kontrolujących i monitorujących - segmentu użytkownika – odbiorników GPS: wojsko oraz użytkownicy cywilni

54
SEGMENT KOSMICZNY 27 satelitów (24 aktywne + 3 zapasowe) 6 orbit kołowych, po 4 satelity na orbicie Wysokość orbity km Kąt nachylenia orbity do płaszczyzny równika – 55.0 stopni Czas obiegu - ok. 11 godz. 57 min. Widoczność min. 5 satelitów usytułowanych ponad 5.0 stopni nad horyzontem w dowolnym miejscu Ziemi z prawdopodobieństwem 0,9996

55
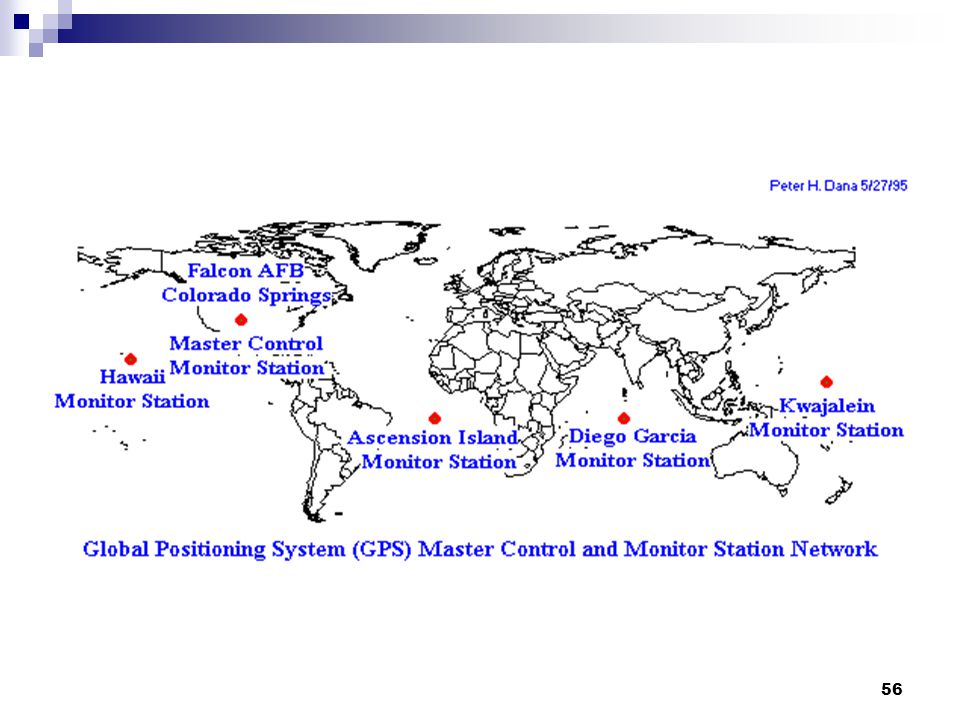
SEGMENT KONTROLI Główna Stacja Monitorująca – Baza sił powietrznych Falkon w Colorado Springs Stacje monitorujące: Hawaje, Diego Garcia, Ascesion Stacje monitorujące przesyłają informacje do stacji głównej, gdzie wyliczane są efemerydy i poprawki zegarów satelitów

57
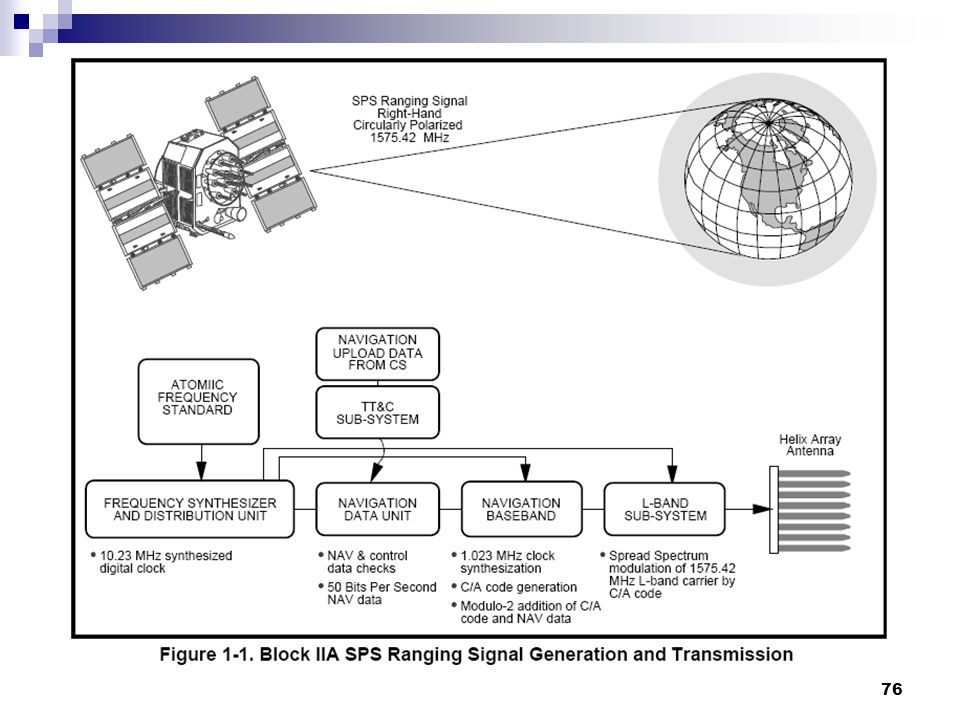
SYGNAŁ GPS Sygnał emitowany przez satelity GPS ma postać fal nośnych (L1 i L2) kodowanej fazowo sygnałami: - informacyjnym, o prędkości 50 bitów na sekundę- depesza nawigacyjna zawierająca min. almanach i efemerydę, nakładana na kod C/A i P - pseudolosowym kodem C/A (akwizycja zgrubna), taktowanym częstotliwością 1,023 MHz, emitowany na częstotliwości nośnej L1, każdy satelita ma swój własny kod C/A nazywany także kodem PRN, jest podstawowym kodem używanym przez odbiorców cywilnych - pseudolosowym kodem P (dokładnym), taktowanym częstotliwością 10,23 MHz, emitowany na częstotliwości nośnej L1 i L2 - pseudolosowym kodem Y, taktowanym częstotliwością około 0.5 Hz. – uaktywnianym w chwili zagrożenia (szyfrującym kod P)- dostępny tylko dla autoryzowanych użytkowników (wojsko)
, taktowanym częstotliwością 1,023 MHz, emitowany na częstotliwości nośnej L1, każdy satelita ma swój własny kod C/A nazywany także kodem PRN, jest podstawowym kodem używanym przez odbiorców cywilnych. - pseudolosowym kodem P (dokładnym), taktowanym częstotliwością 10,23 MHz, emitowany na częstotliwości nośnej L1 i L2. - pseudolosowym kodem Y, taktowanym częstotliwością około 0.5 Hz. – uaktywnianym w chwili zagrożenia (szyfrującym kod P)- dostępny tylko dla autoryzowanych użytkowników (wojsko)")
58
kody różnych satelitów nie były skorelowane między sobą,
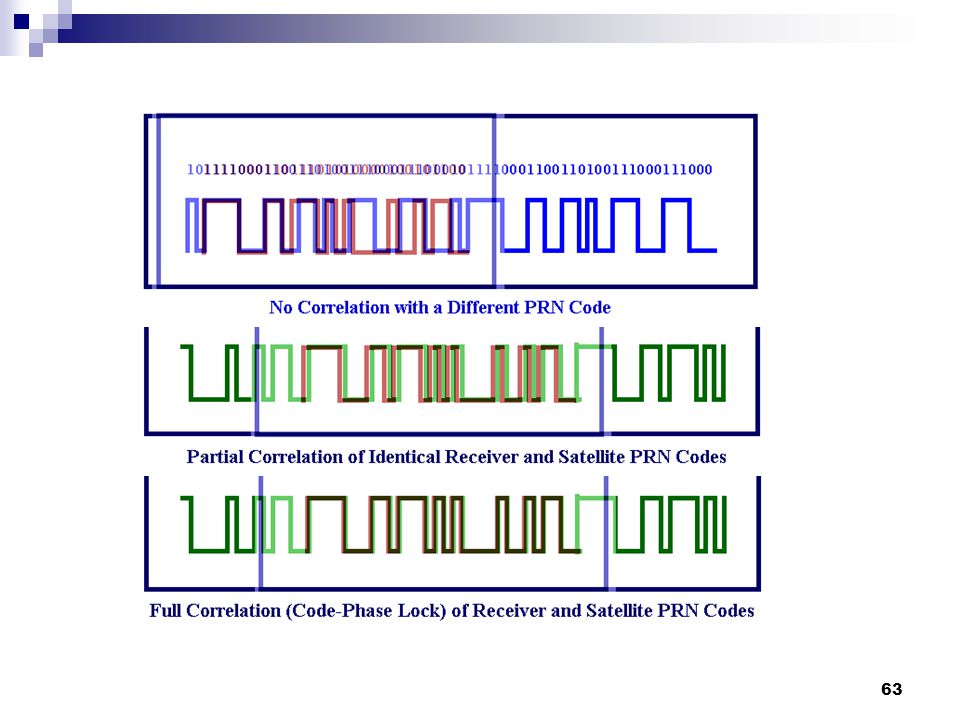
Kod P(Y) Kod P jest sekwencją trwającą 267 dni, każdy z satelitów ma przypisany jednotygodniowy segment tego kodu. Szybkość transmisji wynosi MHz. Kod C/A Kod C/A składa się z 1023 bitów transmitowanych z szybkością MHz, cała sekwencja powtarza się więc co 1 milisekundę. Każdemu z satelitów przypisany jest inny kod C/A. Bity kodu nazywane są chipami. Sekwencja dobrana jest tak by: kody różnych satelitów nie były skorelowane między sobą, dla każdego satelity współczynnik autokorelacji miał tylko jedno maksimum. Cechy te umożliwiają akwizycję i niezależny odbiór sygnałów nadawanych w tym samym paśmie częstotliwości.
 Kod P jest sekwencją trwającą 267 dni, każdy z satelitów ma przypisany jednotygodniowy segment tego kodu. Szybkość transmisji wynosi MHz. Kod C/A. Kod C/A składa się z 1023 bitów transmitowanych z szybkością MHz, cała sekwencja powtarza się więc co 1 milisekundę. Każdemu z satelitów przypisany jest inny kod C/A. Bity kodu nazywane są chipami. Sekwencja dobrana jest tak by: kody różnych satelitów nie były skorelowane między sobą, dla każdego satelity współczynnik autokorelacji miał tylko jedno maksimum. Cechy te umożliwiają akwizycję i niezależny odbiór sygnałów nadawanych w tym samym paśmie częstotliwości.")
59
Treść sygnału informacyjnego zawiera między innymi:
Depesza nawigacyjna Treść sygnału informacyjnego zawiera między innymi: Almanach - dane dotyczące aktualnego stanu systemu, w tym przybliżone elementy orbitalne wszystkich satelitów, których znajomość przyśpiesza proces akwizycji, Efemeryda - podane dokładnie elementy orbitalne satelity, który nadaje depeszę, niezbędne do wyznaczania czasu i pozycji.

60
Treść depeszy nawigacyjnej zostaje nałożona na kod P i kod C/A
Treść depeszy nawigacyjnej zostaje nałożona na kod P i kod C/A. Uzyskiwana prędkość transmisji stanowi 50 bitów na sekundę. Jej treść zawiewra 25 ramek, każda złożona z 1500 bitów. Każda ramka podzielona jest na 5 podramek, po 300 bitów każda. Odebranie jednej ramki danych zajmuje więc 30 sekund, a odebranie wszystkich 25 ramek zajmuje 12.5 minuty. Podramki 1,2 i 3 powtarzają te same 900 bitów danych we wszystkich 25 ramkach, umożliwia to odbiornikowi odebranie krytycznych danych w ciągu 30 sekund. Dane depeszy nawigacyjnej uaktualniane są co cztery godziny. Depesza zawiera informację o momencie transmisji Hand Over Word (HOW), umożliwiającą przejście od śledzenia kodu C/A do śledzenia kodu P(Y), dane efemerydalne i dane o zegarze oraz almanach (czyli zgrubne parametry ruchu i statusy dla wszystkich satelitów w konstelacji). Dodatkowo transmitowane są dane o "zdrowiu" satelitów, współczynniki do modelu opóźnienia jonosferycznego, współczynniki umożliwiające obliczenie czasu UTC.
, umożliwiającą przejście od śledzenia kodu C/A do śledzenia kodu P(Y), dane efemerydalne i dane o zegarze oraz almanach (czyli zgrubne parametry ruchu i statusy dla wszystkich satelitów w konstelacji). Dodatkowo transmitowane są dane o zdrowiu satelitów, współczynniki do modelu opóźnienia jonosferycznego, współczynniki umożliwiające obliczenie czasu UTC.")
61
FUNKCJE ODBIORNIKA GPS
Odbiór i wzmocnienie sygnału odebranego od satelity Zmniejszenie częstotliwości i przetworzenie na postać cyfrową Identyfikacja satelitów na podstawie kodu C/A (PRN) Odczytanie danych zawartych w depeszy nawigacyjnej i wyznaczenie opóźnień sygnału od satelity do anteny
 Odczytanie danych zawartych w depeszy nawigacyjnej i wyznaczenie opóźnień sygnału od satelity do anteny.")
62
ZASADA OPÓŹNIENIA SYGNAŁU – WYZNACZANIE PSEUDOODLEGŁOŚCI
Pomiar kodowy Pomiar opóźnienia odbywa się poprzez skorelowanie kodu C/A nadawanego przez satelitę z wzorcem kodu satelity zapisanym i odtwarzanym w odbiorniku GPS. W depeszy nawigacyjnej zapisany jest czas wysłania sygnału

64
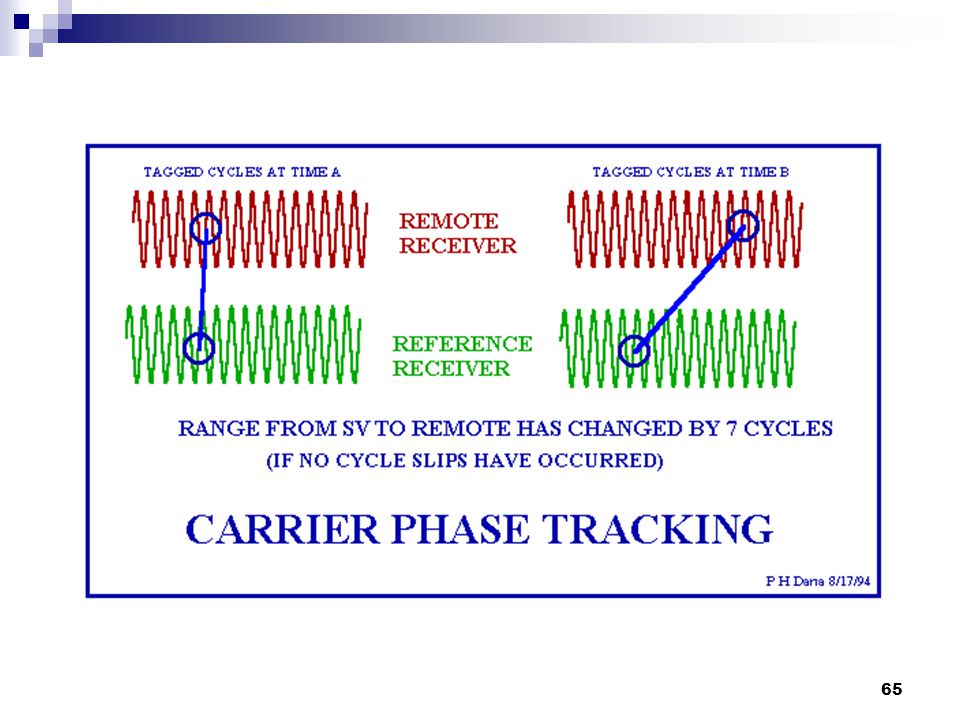
POMIAR FAZOWY Odbiornik generuje sygnał identyczny z falą nośną satelitów i wykonuje pomiar przesunięcia fazowego tj. określa ile całkowitych oraz jaki ułamek długości fali nośnej mieści się na drodze satelita – obserwator. Metoda bardzo dokładna (dokładności subcentymetrowe), wymagająca zaawansowanych technologicznie odbiorników i dłuższego czasu pomiaru
, wymagająca zaawansowanych technologicznie odbiorników i dłuższego czasu pomiaru.")
66
Metoda RTK Technika RTK („Real-Time Kinematic”) wykorzystuje pomiary fazowe. Pozycjonowanie tą techniką daje dokładności rzędu 1-2 cm, przy bardzo krótkich czasach obserwacji. Technika ta także wymaga odbiornika umieszczonego na stacji referencyjnej, o znanych współrzędnych oraz odpowiedniego sprzętu, zapewniającego łączność radiową z odbiornikami ruchomymi. W technice RTK stacja referencyjna emituje informacje dotyczące pomiarów fazowych (surowe pomiary fazowe oraz poprawki). Czas, jaki jest potrzebny na osiągnięcie tak wysokich dokładności wyznaczenia współrzędnych zależy od ilości satelitów (minimum 5) oraz od odległości do stacji referencyjnej (maksymalnie 10 km). Szybkość przesyłania informacji musi wynosić przynajmniej 9600 bitów/sekundę. Algorytmy stosowane w technice RTK muszą zapewniać odpowiednie rozwiązanie w bardzo krótkim czasie, na podstawie niewielkiej liczby obserwacji (krótki czas obserwacji). Znanych i stosowanych w praktyce jest wiele różnych metod obliczeń, spełniających te wymogi. Wiele z tych algorytmów wykorzystuje np. filtr Kalmana, definiując (w ogólności) układ równań dynamicznych (uwzględniających, poprzez tzw. macierz przejścia, dynamikę układu), w których niewiadomymi są współrzędne trójwymiarowe odbiornika ruchomego, ewentualnie jego prędkość i przyspieszenie, parametry ambiguity oraz opóźnienie jonosferyczne
 wykorzystuje pomiary fazowe. Pozycjonowanie tą techniką daje dokładności rzędu 1-2 cm, przy bardzo krótkich czasach obserwacji. Technika ta także wymaga odbiornika umieszczonego na stacji referencyjnej, o znanych współrzędnych oraz odpowiedniego sprzętu, zapewniającego łączność radiową z odbiornikami ruchomymi. W technice RTK stacja referencyjna emituje informacje dotyczące pomiarów fazowych (surowe pomiary fazowe oraz poprawki). Czas, jaki jest potrzebny na osiągnięcie tak wysokich dokładności wyznaczenia współrzędnych zależy od ilości satelitów (minimum 5) oraz od odległości do stacji referencyjnej (maksymalnie 10 km). Szybkość przesyłania informacji musi wynosić przynajmniej 9600 bitów/sekundę. Algorytmy stosowane w technice RTK muszą zapewniać odpowiednie rozwiązanie w bardzo krótkim czasie, na podstawie niewielkiej liczby obserwacji (krótki czas obserwacji). Znanych i stosowanych w praktyce jest wiele różnych metod obliczeń, spełniających te wymogi. Wiele z tych algorytmów wykorzystuje np. filtr Kalmana, definiując (w ogólności) układ równań dynamicznych (uwzględniających, poprzez tzw. macierz przejścia, dynamikę układu), w których niewiadomymi są współrzędne trójwymiarowe odbiornika ruchomego, ewentualnie jego prędkość i przyspieszenie, parametry ambiguity oraz opóźnienie jonosferyczne.")
67
Metoda statyczna Najszerzej stosowaną i najbardziej znaną jest technika obserwacji statycznych. Klasyfikując ją wśród innych można powiedzieć, iż jest to metoda typu postprocessing, wykorzystująca pomiary fazowe. Zapewnia ona najwyższe, możliwe do osiągnięcia w pomiarach GPS, dokładności pozycjonowania. Błędy średnie położeń punktów wyznaczonych tą techniką są rzędu 2-5 mm, wymaga ona jednak dość długich jednoczesnych obserwacji na obu punktach. Ogólny algorytm, który jest najczęściej stosowany w przypadku konieczności obliczania przyrostów pomierzonego wektora trójwymiarowego w sesji statycznej znaleźć można w wielu podstawowych publikacjach dotyczących GPS.

68
BUDOWA SATELITÓW GPS Satelita Navstar serii II R składa się z dziewięciu podstawowych systemów: system wprowadzania na orbitę, system kontroli wysokości i prędkości, system kontroli reakcji, system śledzenia, telemetrii i sterowania, system nawigacyjny, system wykrywania wybuchów jądrowych, system kontroli termicznej, blok zasilania, konstrukcji nośnej.

69
GLONASS Globalny System Nawigacyjny- podobnie jak GPS z tą różnicą, że właścicielem systemu są siły zbrojne Rosji. Istnieją także różnice techniczne. System składa się z 24 (docelowo) satelitów rozmieszczonych na trzech orbitach kołowych o promieniu ok km. Płaszczyzna orbit nachylona jest do płaszczyzny równika pod kątem 64,8 stopnia. Czas obiegu satelity wokół Ziemi wynosi ok. 11 godzin i 15 minut. Glonass nie osiągnął pełnej funkcjonalności z uwagi na nie skompletowaną konstelację satelitów. W chwili obecnej na orbitach jest 13 aktywnych satelitów.
 satelitów rozmieszczonych na trzech orbitach kołowych o promieniu ok km. Płaszczyzna orbit nachylona jest do płaszczyzny równika pod kątem 64,8 stopnia. Czas obiegu satelity wokół Ziemi wynosi ok. 11 godzin i 15 minut. Glonass nie osiągnął pełnej funkcjonalności z uwagi na nie skompletowaną konstelację satelitów. W chwili obecnej na orbitach jest 13 aktywnych satelitów.")
70
GALILEO Galileo Globalny System Nawigacyjny System cywilny
System niezależny od GPS i GLONASS Gwarantowany serwis Faza operacyjna od 2008 roku Inicjatywa Komisji Europejskiej i ESA GALILEO

71
Galileo Satellite-only Navigation, Positioning & Timing Services
(planowane serwisy): Open Service (OS) – otwarty serwis publiczny Commercial Service (CS) – serwis komercyjny (odpłatny) Safety of Life Service (SoL)- serwis ratowniczy Public Regulated Service (PRS)- dla służb rządowych GALILEO
: Open Service (OS) – otwarty serwis publiczny. Commercial Service (CS) – serwis komercyjny (odpłatny) Safety of Life Service (SoL)- serwis ratowniczy. Public Regulated Service (PRS)- dla służb rządowych. GALILEO.")
72
GALILEO

73
GALILEO

74
GALILEO+GPS

75
GŁÓWNI UDZIAŁOWCY NA RYNKU TECHNOLOGI GPS
RYNEK ŚWIAT wartość/liczba sztuk EUROPA LOTNICTWO Systemy pokładowe Systemy naziemne 200 mln dol./brak danych 45 mln euro/brak danych NAWIGACJA MORSKA Systemy nawigacyjne Stacje referencyjne 57 mln dol./28 tys. 15 mln euro/6 tys. ZARZĄDZANIE FLOTĄ 170 mln dol./125 tys. 40 mln euro/20 tys. NAWIGACJA SAMOCHOD. Odbiorniki Mapy cyfrowe 2200 mln dol./2 mln 600 mln euro/0.5 mln TRANSPORT KOLEJOWY 2 mln dol./1 tys. 1 mln euro/ 0.5 tys. GEODEZJA, MAPY Odbiorniki i programy 225 mln dol./15 tys 45 mln euro/3 tys. ROLNICTWO 25 mln dol./2.5 tys. 5 mln euro/0.6 tys. TELEFONIA KOMÓRKOWA brak danych/283.6 mln brak danych/93.5 mln SERWIS TELEMATYCZNY brak danych 80 mln euro/brak danych

78
CENTRUM ZARZĄDZANIA ASG-EUPOS
Możliwości wykonywania pomiarów za pomocą wszystkich rodzajów profesjonalnych odbiorników GPS (jedno i dwuczęstotliwościowych) oraz automatycznego opracowania wyników pomiarów w systemie obliczeniowym ASG-EUPOS. Zastosowano bardzo wysoki poziom automatyki wszystkich procesów wykonywanych przez system działających w pełni automatycznie zarówno w zakresie: - komunikacji i sterowania stacjami, - wykonywaniem obliczeń sieci ASG-EUPOS, - wykonywaniem obliczeń użytkowników w trybie post-processingu, - Gromadzenia i archiwizacji danych obserwacyjnych. Zastosowanie standardu otwartego pozwala na łatwość rozbudowy systemu poprzez włączanie kolejnych stacji referencyjnych GPS co sprowadza koszty rozbudowy systemu do poziomu związanego z zakupem stacji GPS. kieruje działaniem całości systemu Aktywnej Sieci Geodezyjnej ASG-PL. System ASG-PL dostępny jest dla użytkowników przez 24 godziny na dobę poprzez stronę WWW systemu:
 oraz automatycznego opracowania wyników pomiarów w systemie obliczeniowym ASG-EUPOS. Zastosowano bardzo wysoki poziom automatyki wszystkich procesów. wykonywanych przez system działających w pełni automatycznie zarówno w zakresie: - komunikacji i sterowania stacjami, - wykonywaniem obliczeń sieci ASG-EUPOS, - wykonywaniem obliczeń użytkowników w trybie post-processingu, - Gromadzenia i archiwizacji danych obserwacyjnych. Zastosowanie standardu otwartego pozwala na łatwość rozbudowy systemu. poprzez włączanie kolejnych stacji referencyjnych GPS co sprowadza koszty rozbudowy. systemu do poziomu związanego z zakupem stacji GPS. kieruje działaniem całości. systemu Aktywnej Sieci Geodezyjnej ASG-PL. System ASG-PL dostępny jest dla użytkowników przez 24 godziny na dobę. poprzez stronę WWW systemu:")
80
DOSTĘPNE SYSTEMY POZYCJONOWANIA

81
LITARATURA [1]. Wprowadzenie do technologii nawigacji satelitarnej, Margonin, , Szkolenie SIP dla DGLP. [2]. Podstawy Technologii Satelitarnych Systemów Lokalizacyjnych GPS, GLONASS, Piotr Frączyk, NAVI sp. z o.o. , Mariusz Figurski, Politechnika Warszawska, Grzegorz Modliński, NAVI sp. z o.o. , Zofia Rzepecka, ART Olsztyn, Anna Tyranowska, CBK PAN [3]. [11] Układy współrzędnych stosowane w Polsce i ich relacje względem globalnego układu WGS84, Jacek Lamparski, Instytut Geodezji ART. Olsztyn
![LITARATURA [1]. Wprowadzenie do technologii nawigacji satelitarnej, Margonin, , Szkolenie SIP dla DGLP.](http://slideplayer.pl/slide/5064795/16/images/81/LITARATURA+%5B1%5D.+Wprowadzenie+do+technologii+nawigacji+satelitarnej%2C+Margonin%2C+%2C+Szkolenie+SIP+dla+DGLP..jpg "[2]. Podstawy Technologii Satelitarnych Systemów Lokalizacyjnych. GPS, GLONASS, Piotr Frączyk, NAVI sp. z o.o. , Mariusz Figurski, Politechnika Warszawska, Grzegorz Modliński, NAVI sp. z o.o. , Zofia Rzepecka, ART Olsztyn, Anna Tyranowska, CBK PAN. [3]. [11] mright=gps_artykuly_&mitem=uklady, Układy współrzędnych stosowane w Polsce i ich relacje względem. globalnego układu WGS84, Jacek Lamparski, Instytut Geodezji ART. Olsztyn.")






 - abstrakcyjna sfera o nieokreślonym, lecz zwykle dużym promieniu otaczająca obserwatora.>")













