Pobierz prezentację
This is a modal window.
1
Dr inż. Tadeusz Wiśniewski
Wykład 4 Dr inż. Tadeusz Wiśniewski

2
Definicje -inercja 1 rzędu

3
Inercja

4
Definicje

5
Inercja

6
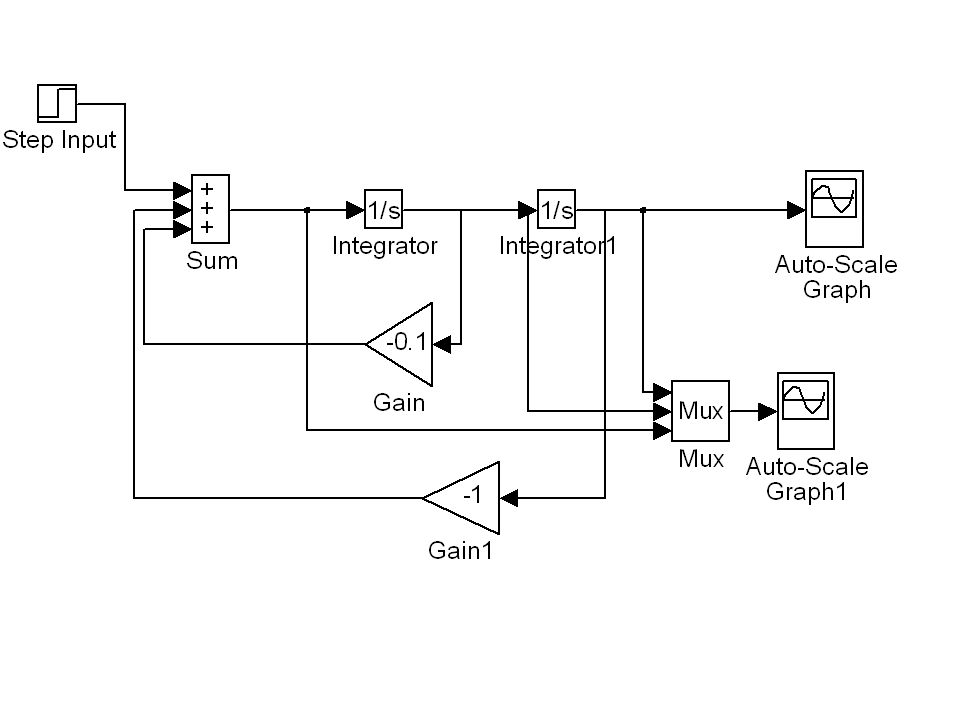
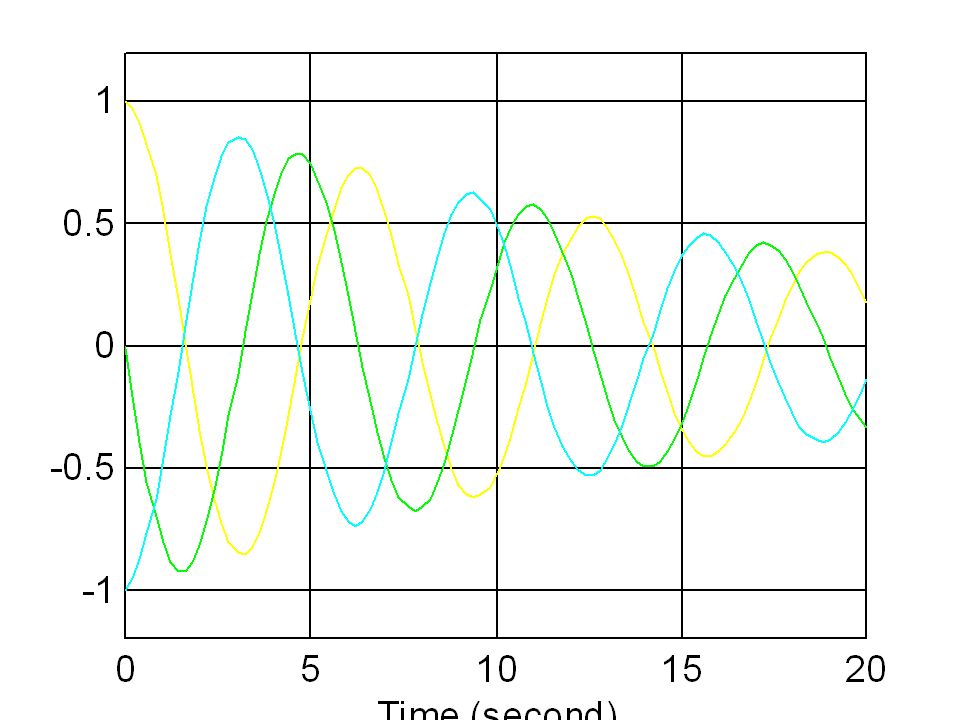
Inercja integrator

10
-b/a ; -c/a -0.5;-1

14
TC

15
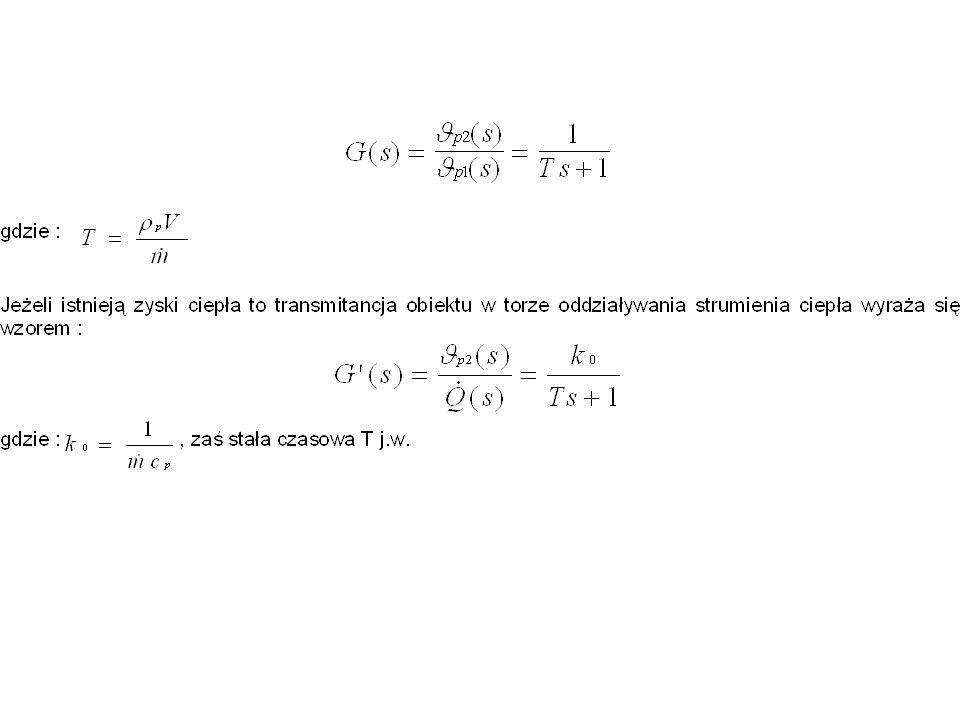
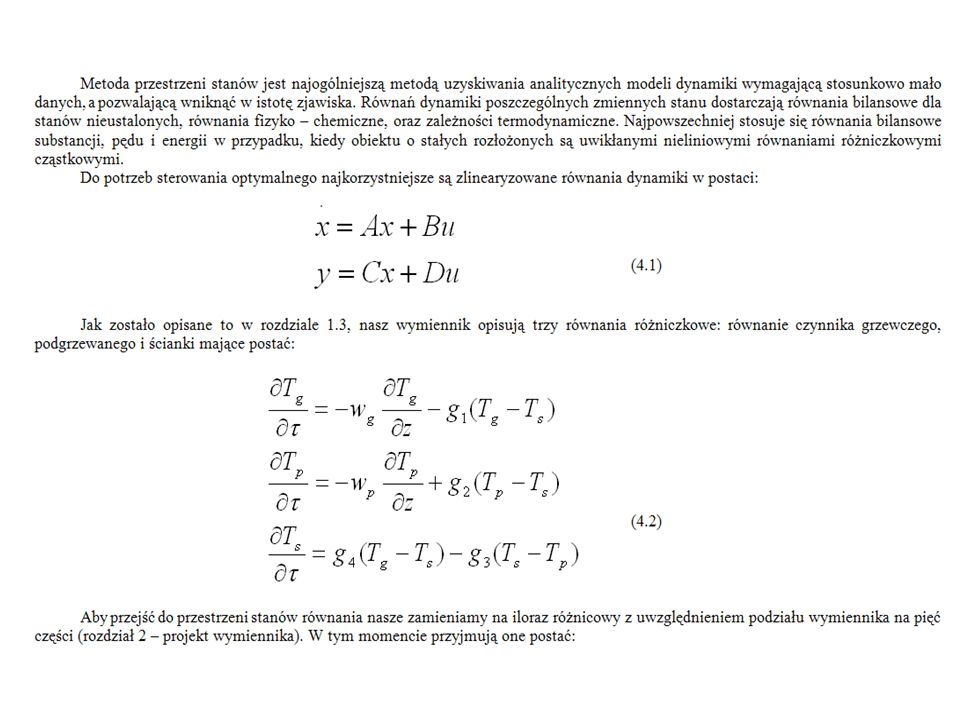
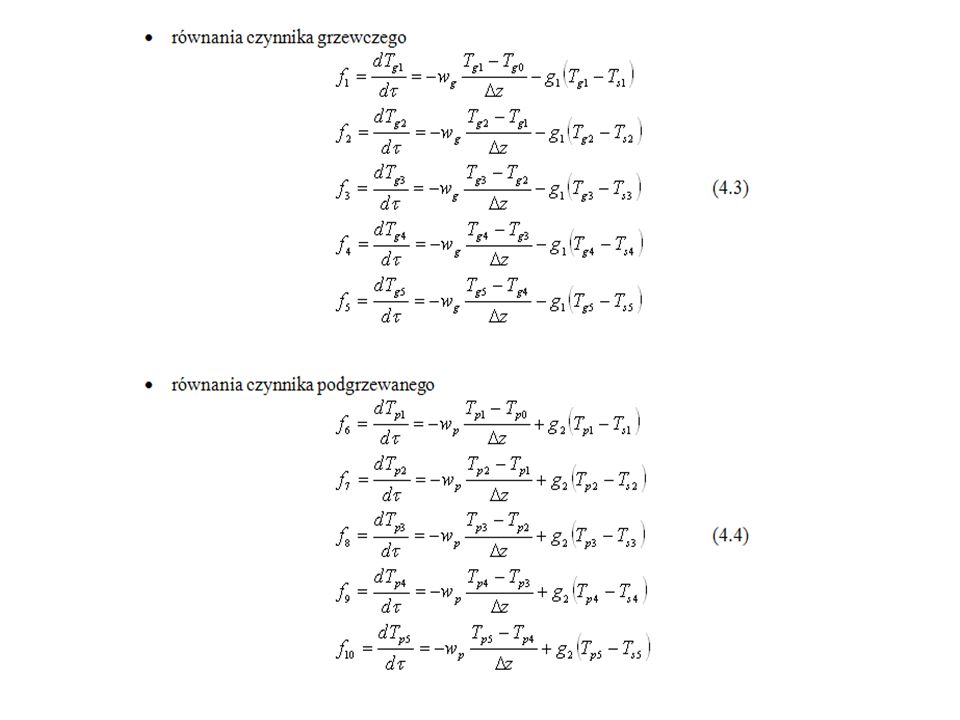
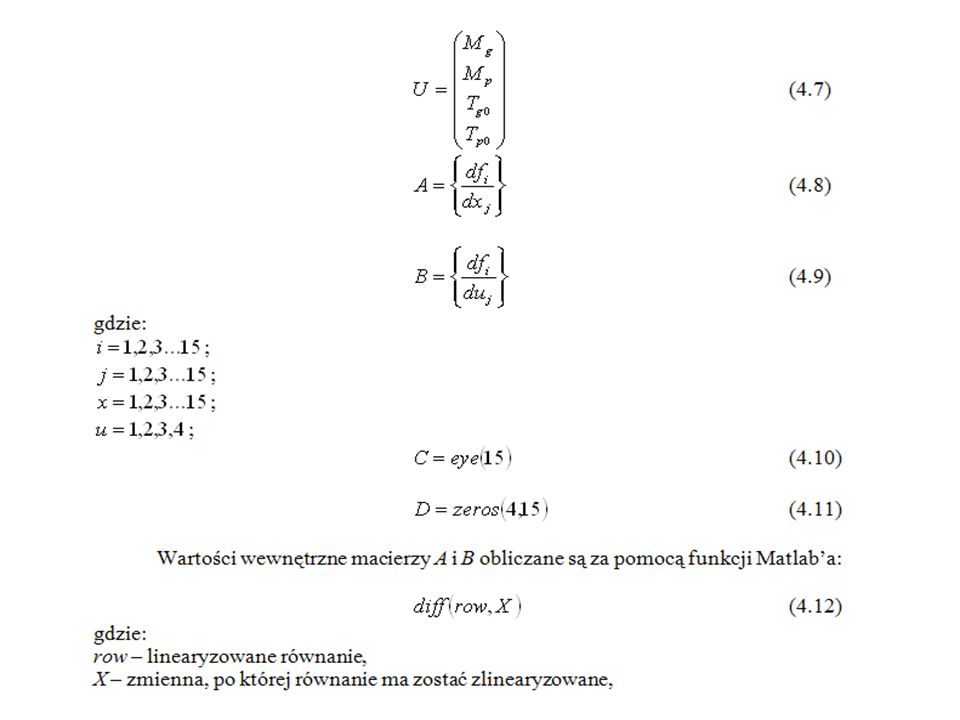
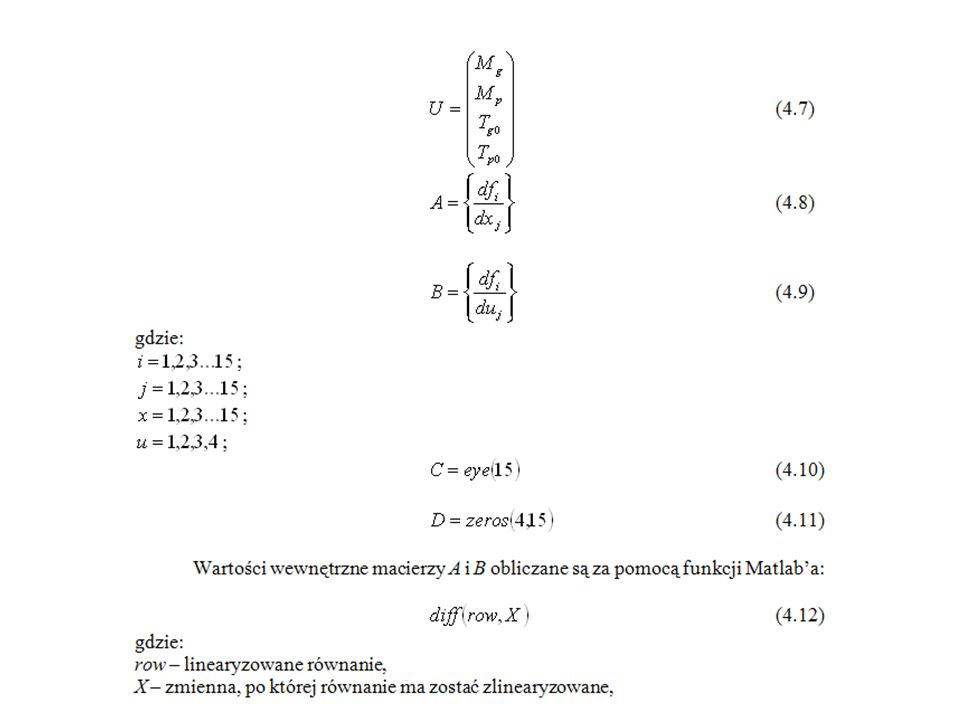
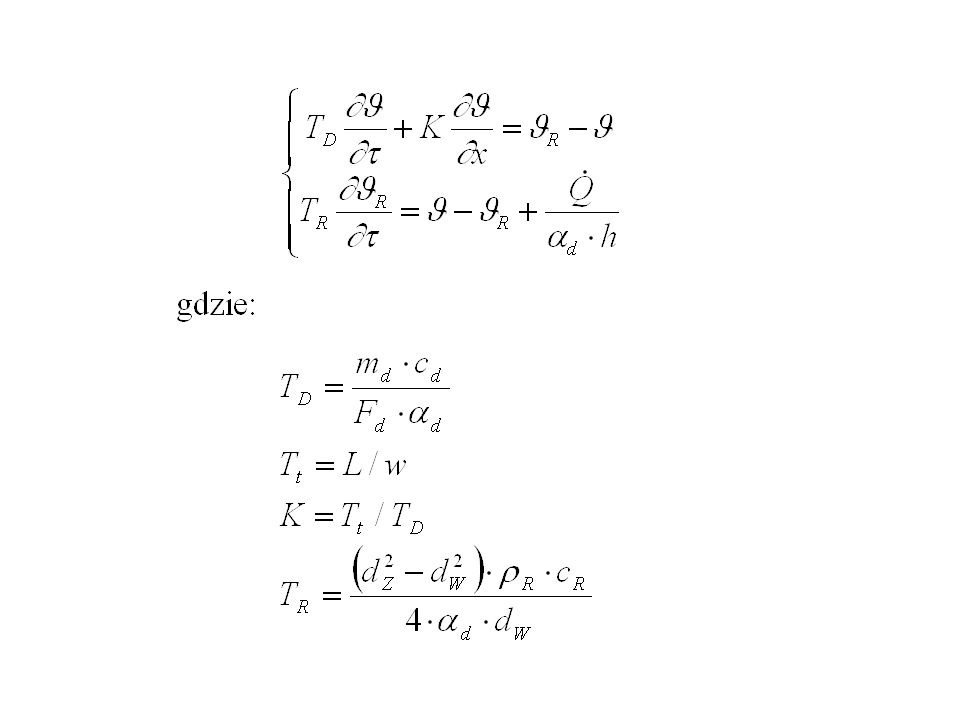
Równania dynamiki wymiennika (dwururowego)
- parametry rozłożone (z- zmienna geometryczna) temperatury płynu grzewczego, podgrzewanego i ścianki
 temperatury płynu. grzewczego, podgrzewanego. i ścianki.")
22
Zakłócenie skokowe Mp(t)= 5 *1(t)
= 5 *1(t)")
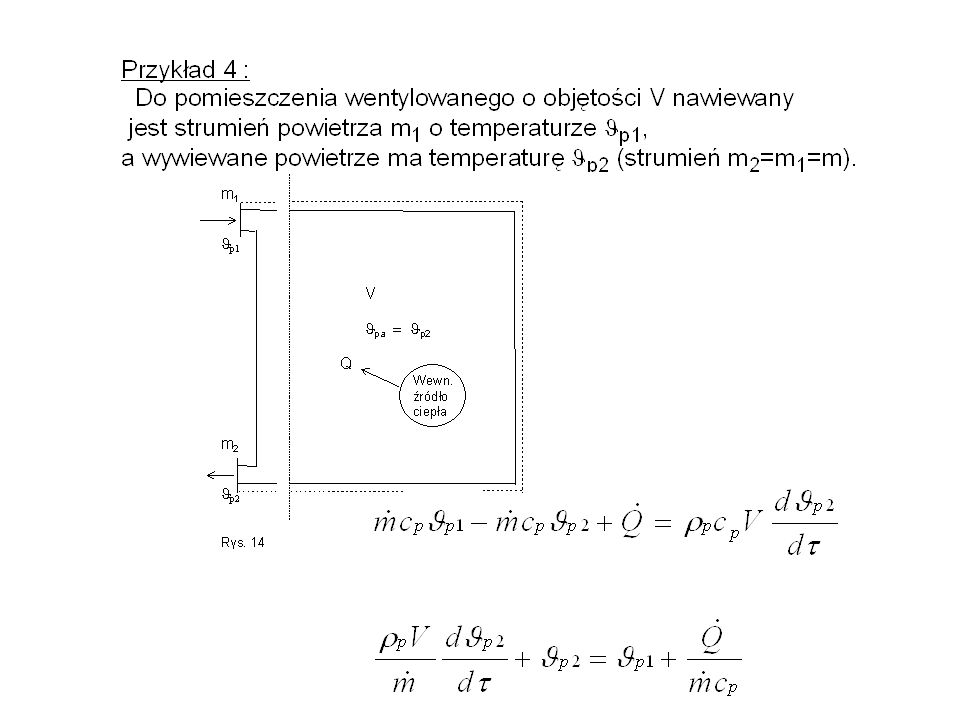
24
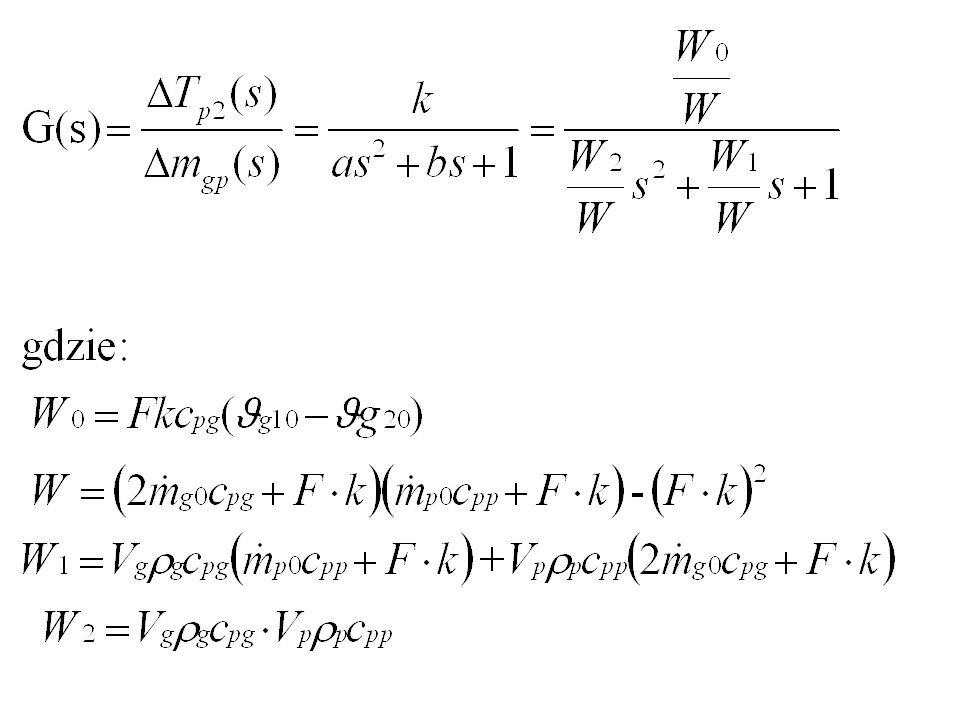
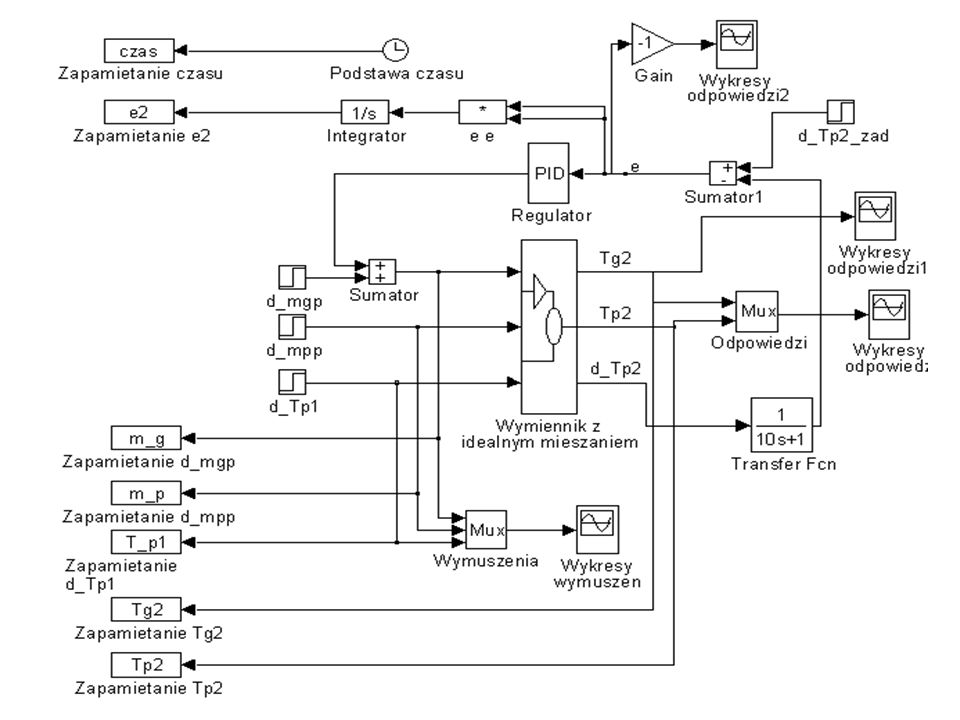
Dynamika wymiennika z idealnym mieszaniem

27
Schemat wyznaczania Tg2
1 mgp Tg2 2 Mux 1/s 1 1 q Integrator stala1 out_1 Fk1 sys1

28
Schemat wyznaczania Tp2
1 2 q d_Tp2 2 mpp Mux f(u) 1/s + + 1 1 3 Integrator1 Sum stala1 Tp2 Tp1 Fk2 Tp20 Tp20 sys2
 1/s Integrator1. Sum. stala1. Tp2. Tp1. Fk2. Tp20. Tp20. sys2.")
29
Statyka obiektu Tp2(mgp)
")
30
Tgśr=82,50C Charakterystyki statyczne wymiennika:
Tp2(mgp),Tp1= e+000, 9, e+001, ... ,mpp=mpp0 62 60 58 56 54 52 50 48 46 44 8 10 12 14 16 18 20 22 24
,Tp1= e+000, 9, e+001, ... ,mpp=mpp")
31
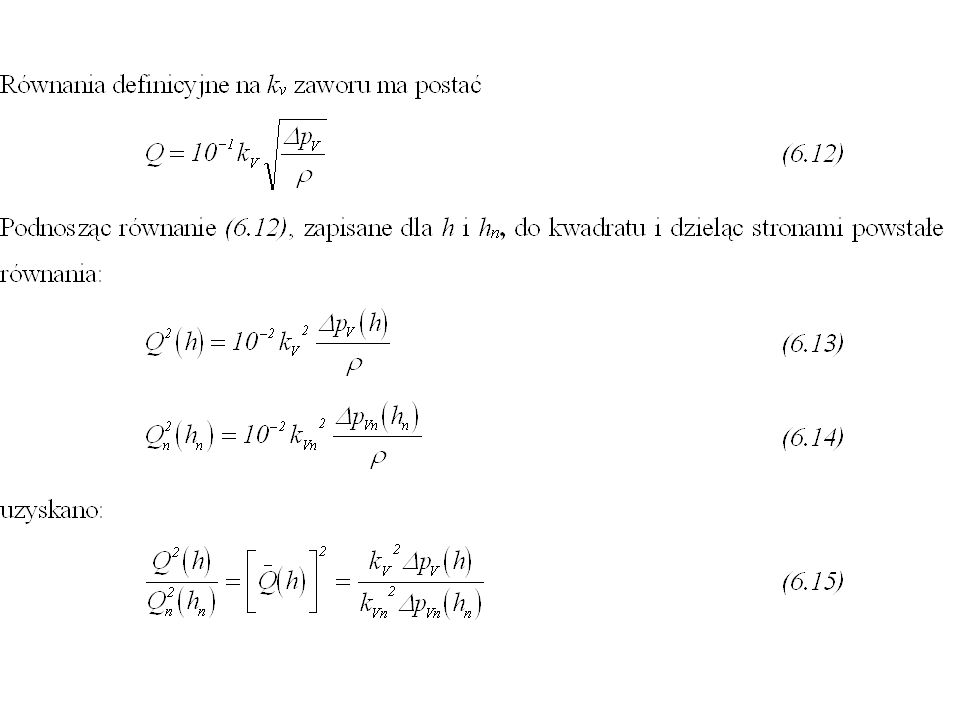
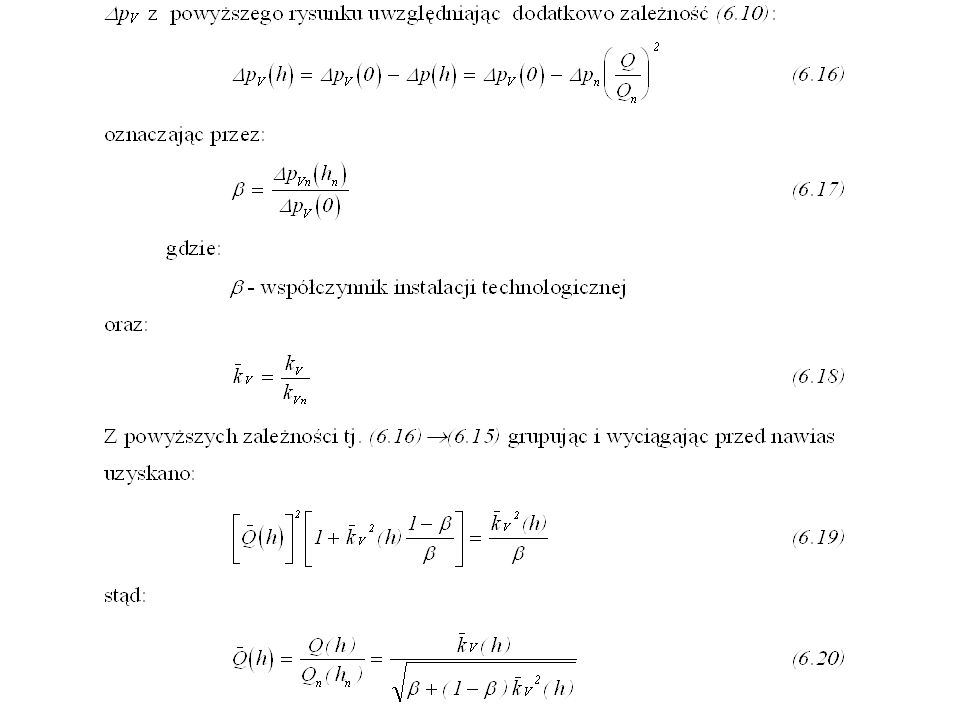
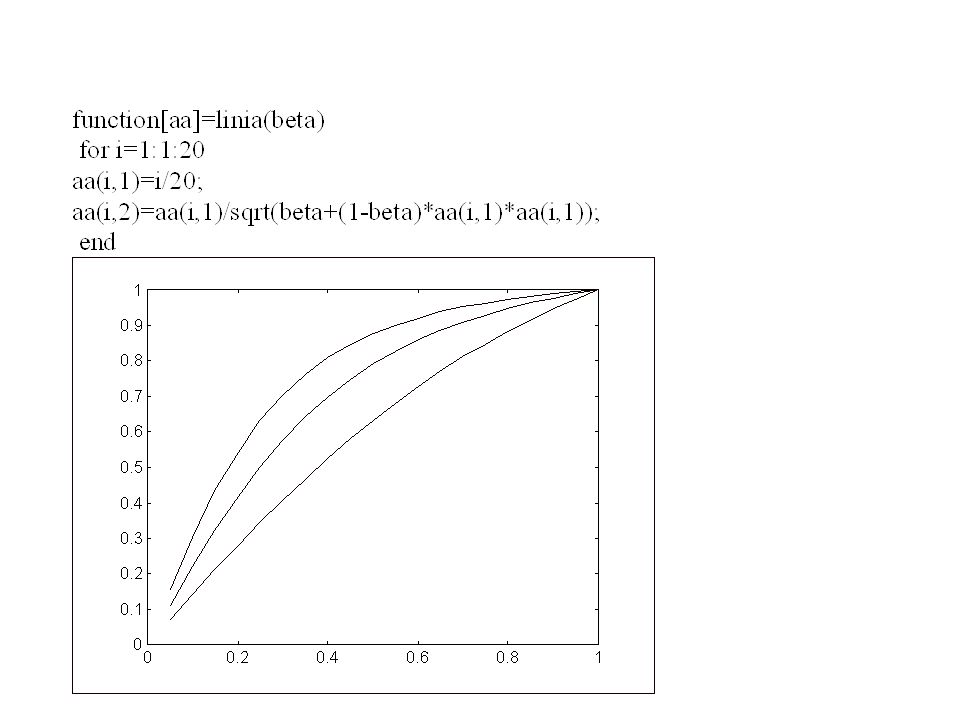
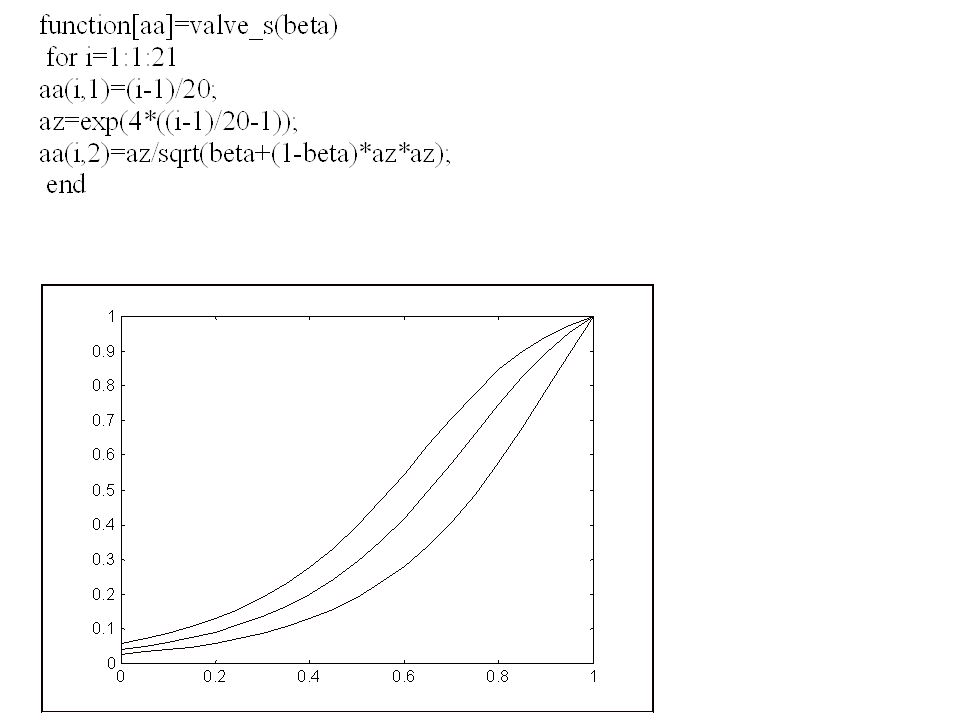
Statyka nastawnika (zaworu)
")
37
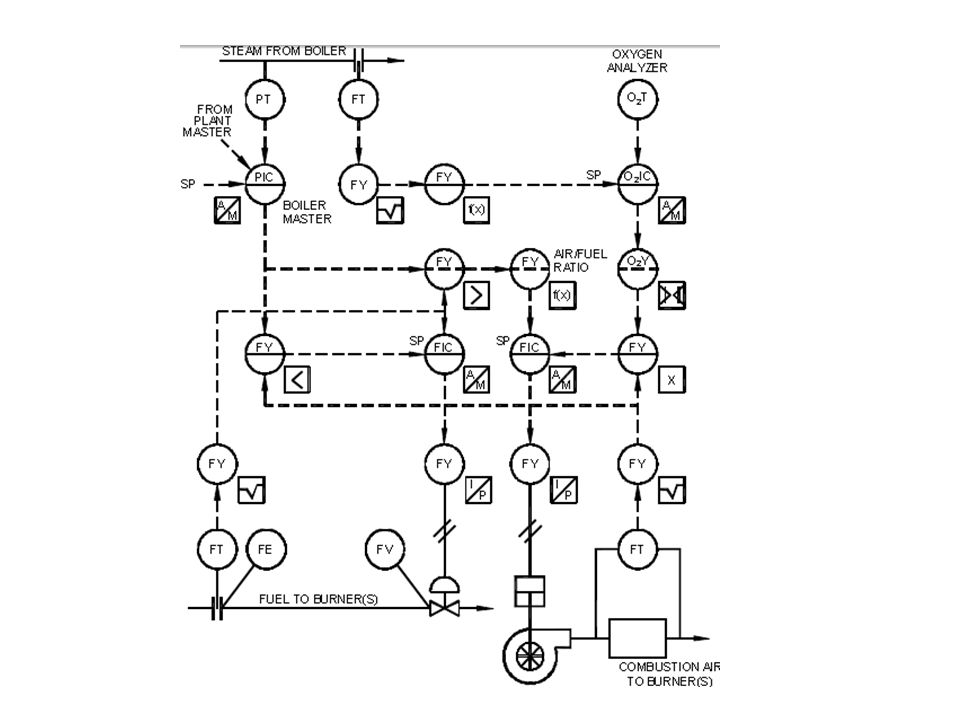
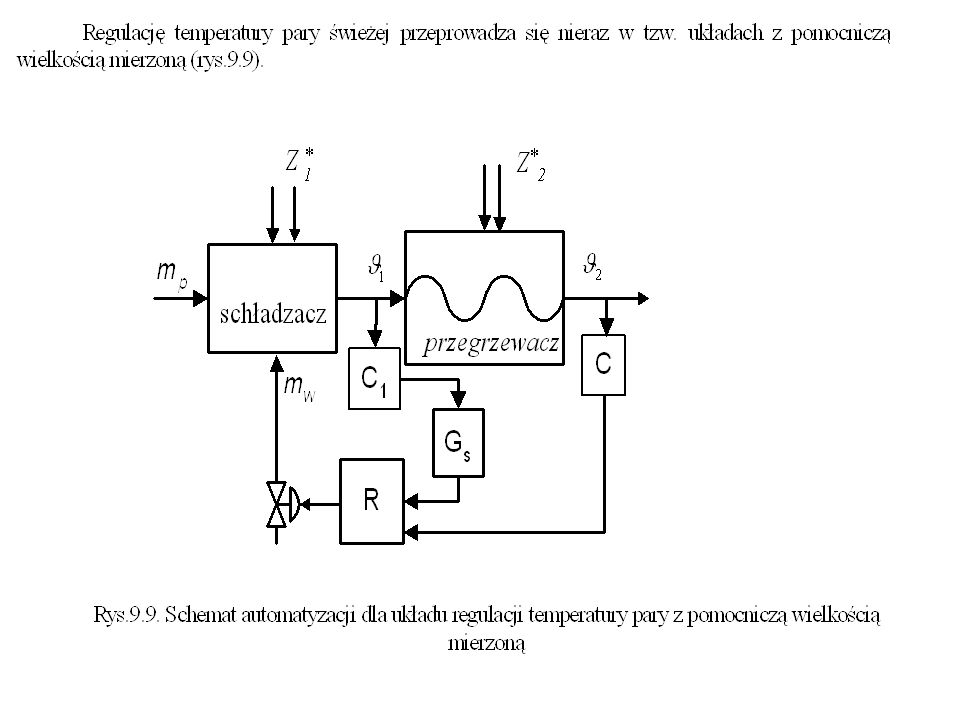
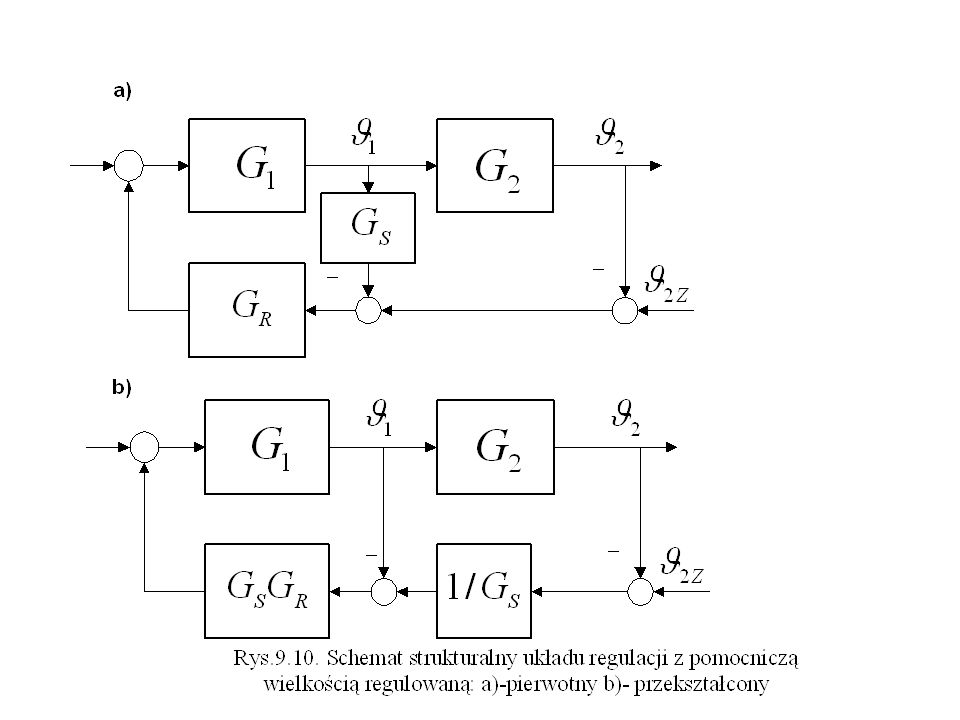
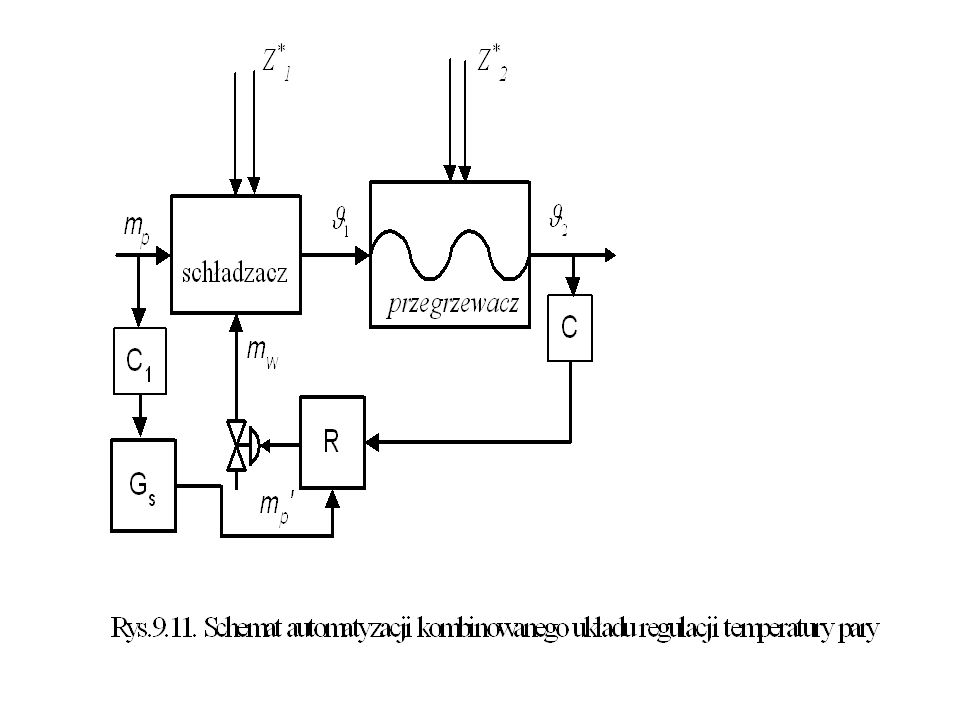
Schemat automatyzacji ciepłowni

44
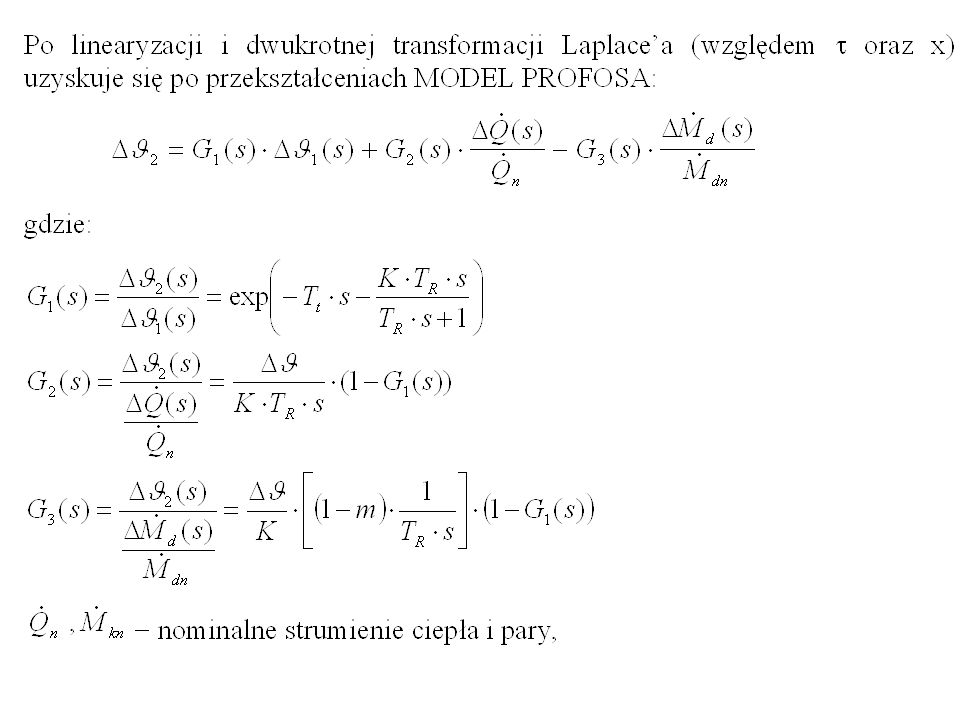
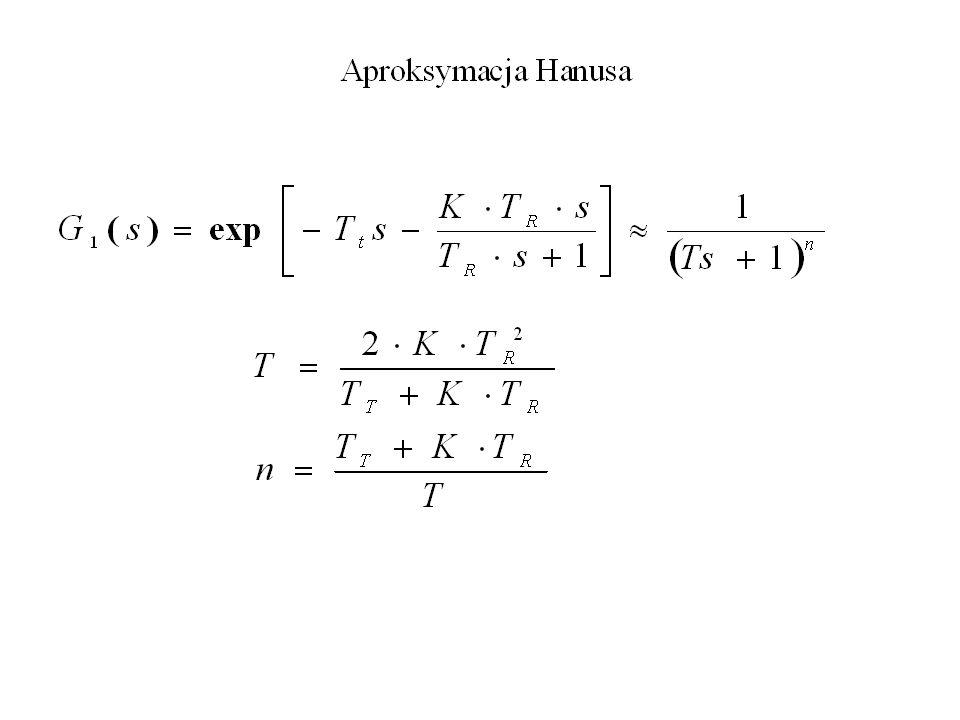
Model Profosa Aproksymacja Hanusa
Przegrzew pary Model Profosa Aproksymacja Hanusa

48
Odpowiedź skokowa za przegrzewaczem na wzrost
Odpowiedź skokowa za przegrzewaczem na wzrost temperatury o na dolocie ; =t/TR

49
Numeryczne odwrotne przekształcenie Laplace’a
f(t)=L-1 [F(s)=G1(s)/s] m - współczynnik skali czasu
=L-1 [F(s)=G1(s)/s] m - współczynnik skali czasu.")
50
Odpowiedź skokowa temperatury za przegrzewaczem na spadek strumienia pary(D) ; =t/TR
 ; =t/TR")
57
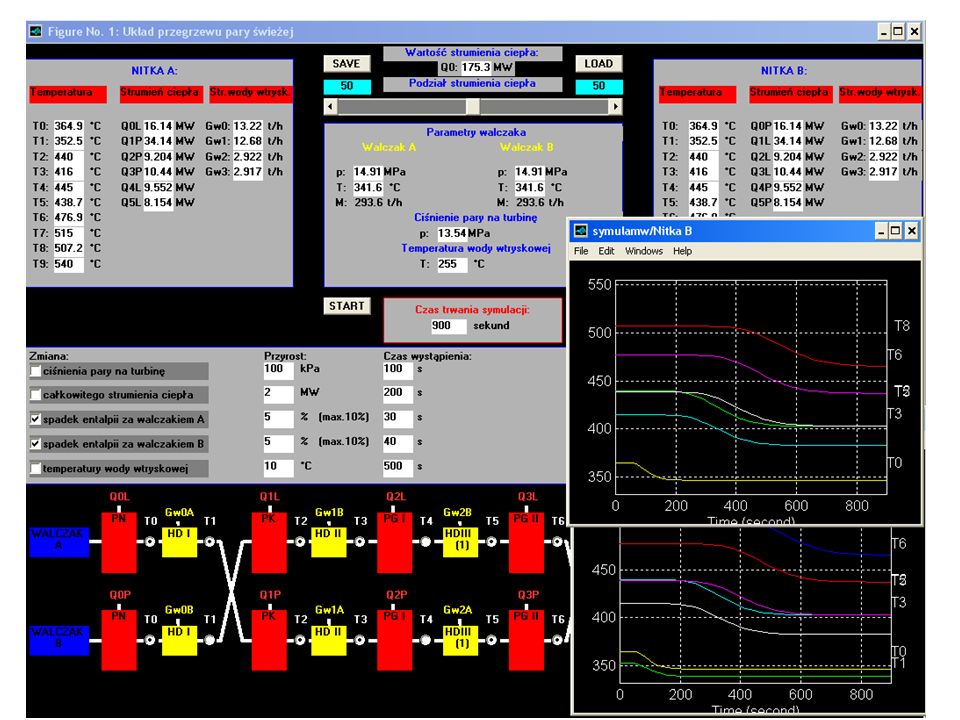
Schemat przepływu czynnika roboczego przez przegrzewacze pary wtórnej w kotle BP1150.

61
Nonlinear Control Design

62
Predyktor Smitha

64
Definicje Mechatronika
Nauka rozwiązująca kompleksowo zagadnienia związane z automatyką, mechaniką, pneumatyką, hydrauliką, elektrotechniką, elektroniką, telekomunikacją i techniką komputerową w ten sposób, aby uzyskać zoptymalizowaną konstrukcję urządzenia – nazywana jest mechatroniką.

65
Mechatronika podręcznik dla ZSZ
Schmid Dietmar cena : zł cena detaliczna: zł Wydawnictwo: REA Spółka Jawna ISBN: Książka ma zaspokoić potrzeby tych wszystkich, którzy pragną opanować zagadnienia związane z mechaniką, pneumatyką, hydrauliką, elektrotechniką, elektroniką, telekomunikacją i techniką komputerową - ogólnie mechatroniką. Książka jest przeznaczona zarówno dla zainteresowanych pogłębieniem swojej ogólnej wiedzy oraz jako podręcznik dla uczących się w średnich i zawodowych szkołach technicznych, oraz jako poradnik zorientowany na zagadnienia praktyczne dla studentów wyższych uczelni technicznych. Na pewno będzie także użyteczna dla profesjonalistów - praktyków zajmujących się szeroko rozumianymi zagadnieniami sterowania i mechatroniki. Książka podzielona jest na 12 rozdziałów:

66
Sterowanie, regulacja, zarządzanie
Podstawy techniki sterowania Sensoryka Podstawy i technika regulacji Technika sterowania numerycznego (NC) Robotyka Produkcja wspomagana komputerowo Zarządzanie jakością Technika informatyczna i telekomunikacyjna Bezpieczeństwo i higiena w pracy Podstawy zarzadzania Szkolenie i techniki prezentacji
 Robotyka. Produkcja wspomagana komputerowo. Zarządzanie jakością. Technika informatyczna i telekomunikacyjna. Bezpieczeństwo i higiena w pracy. Podstawy zarzadzania. Szkolenie i techniki prezentacji.")
67
Definicje Robotyka jest nauką o inteligentnym wykorzystaniu percepcji do działania. Obiektami robotyki są układy zdolne do samoczynnego i samodzielnego działania w zmieniającym się otoczeniu, zwane robotami autonomicznymi lub inteligentnymi.

69
PRZYKŁAD 1 PRZYKŁAD 2 Znaczenie symbolu Symbol
Odpowiednie wejście logiczne powinno być w stanie logicznym "0" 1 Odpowiednie wejście powinno być w stanie logicznym "1" X Odpowiednie wejście może przyjmować dowolny stan logiczny PRZYKŁAD 1 STEP No. MODULE/ FLAG INPUT COMMAND OUTPUT TIME 010 01 101XXXXX 00 0XXXXXXX PRZYKŁAD 2 STEP No. MODULE/ FLAG INPUT COMMAND OUTPUT TIME 012 REF 01 A3 013 D+ A1 014 FR10 015 R100 016 S5 017 G6000 018 D- 019 G1000 020 G2000 021

71
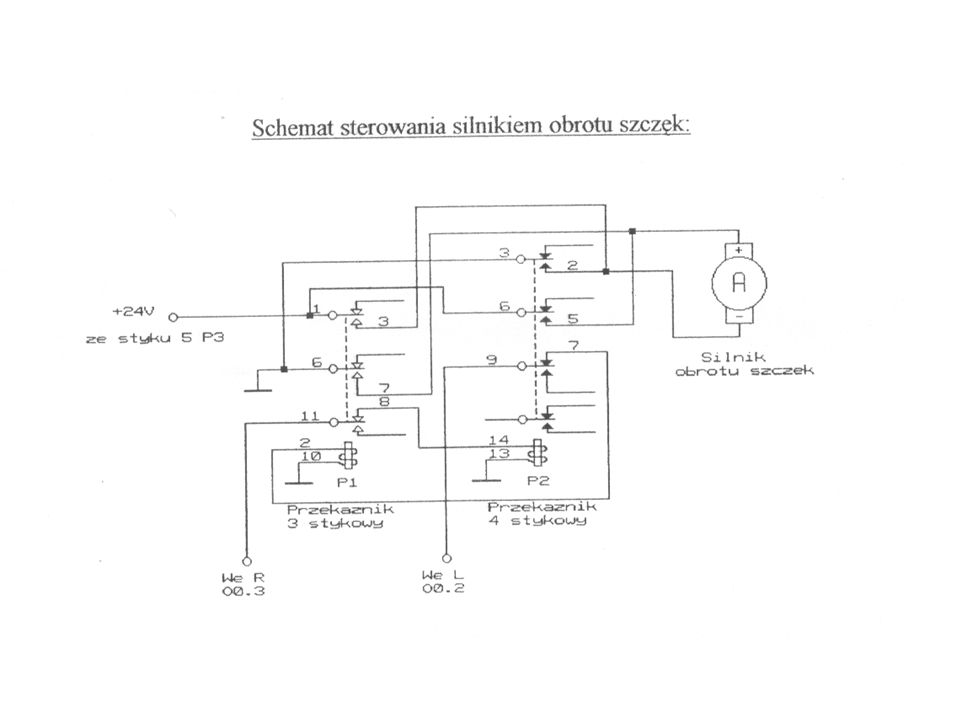
Sterowanie nawrotne napędu (silnika DC )
")
72
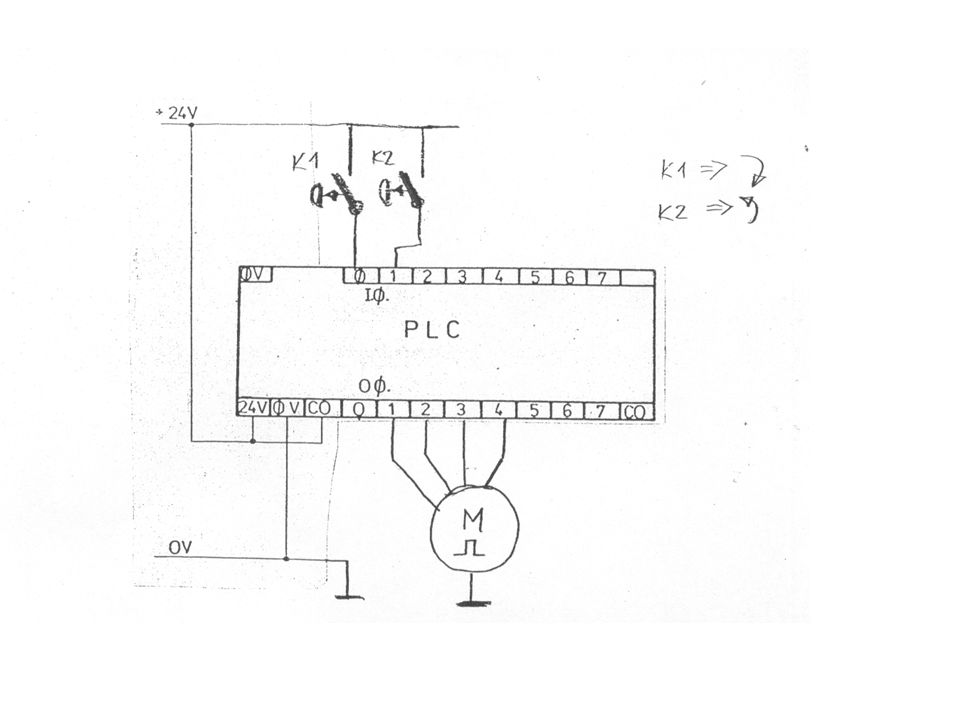
PLC Simatic S7 generator taktujący na SAA 1027

73
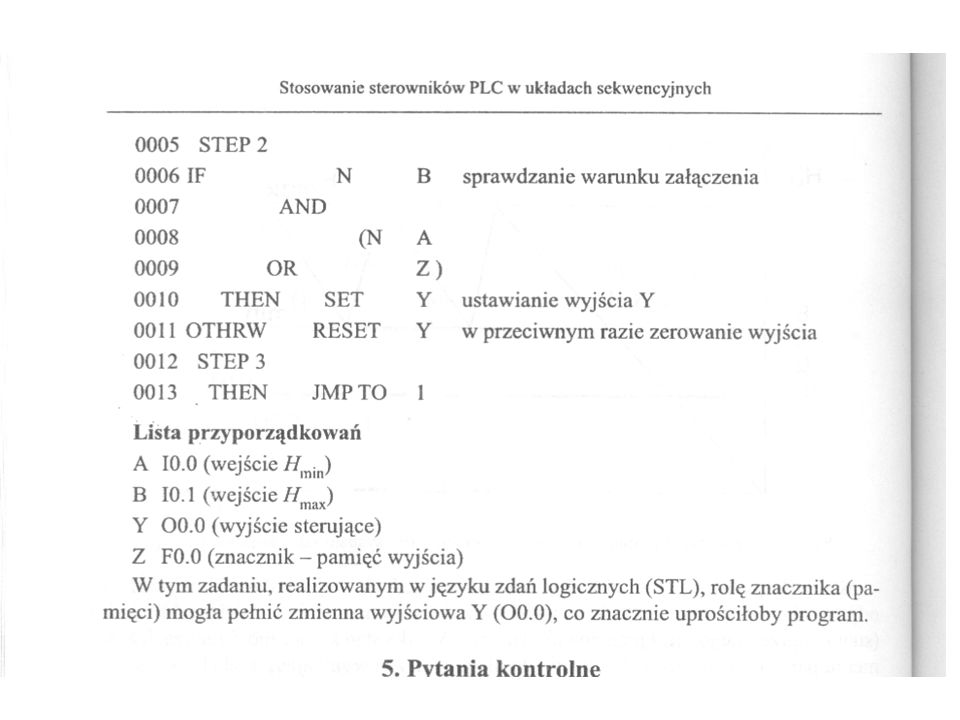
Program generatora taktującego 0.5 Hz w języku STL

76
Ruch CW Q1 Q2 Q3 Q4 1 Ruch CCW Q1 Q2 Q3 Q4 1

77
Program P0 Absolute Symbolic Comment O0.1 Q1 FAZA Q1 O0.2 Q2 FAZA Q2
I lewo I prawo P1 P2 T1 TP1 Program P0 0001 STEP (1) 0002 IF I 'lewo AND N P1 0004 THEN SET P1 RESET P2 0006 OTHRW NOP 0007 IF N I 'lewo 0008 THEN RESET P1 0012 STEP (2) 0013 IF I 'prawo AND N P2 0015 THEN SET P2 RESET P1 0017 OTHRW NOP 0018 IF N I 'prawo 0019 THEN RESET P2 0020 STEP (3) 0021 THEN JMP TO (1)
 0002 IF I0.0 lewo AND N P THEN SET P RESET P OTHRW NOP IF N I0.0 lewo THEN RESET P STEP 2 (2) 0013 IF I0.1 prawo AND N P THEN SET P RESET P OTHRW NOP IF N I0.1 prawo THEN RESET P STEP 3 (3) 0021 THEN JMP TO 1 (1)")
78
Program P1 obroty CW 0001 STEP INIT (1) 0002 THEN LOAD V100
TO TP1 0004 STEP (2) 0005 IF N T1 0006 THEN SET Q 'FAZA Q2 SET Q ‘FAZA Q4 RESET Q 'FAZA Q1 RESET Q 'FAZA Q3 SET T1 0011 STEP (3) 0012 IF N T1 0013 THEN SET Q 'FAZA Q1 RESET Q 'FAZA Q2 SET T1 0016 STEP (4) 0017 IF N T1 0018 THEN SET Q 'FAZA Q3 RESET Q ‘FAZA Q4 SET T1 0021 STEP (5) 0022 IF N T1 0023 THEN SET Q 'FAZA Q2 RESET Q 'FAZA Q2 SET T1 0026 STEP (6) JMP TO (2)
 0005 IF N T THEN SET Q2 FAZA Q SET Q4 ‘FAZA Q RESET Q1 FAZA Q RESET Q3 FAZA Q SET T STEP 2 (3) 0012 IF N T THEN SET Q1 FAZA Q RESET Q2 FAZA Q SET T STEP 3 (4) 0017 IF N T THEN SET Q3 FAZA Q RESET Q4 ‘FAZA Q SET T STEP 4 (5) 0022 IF N T THEN SET Q2 FAZA Q RESET Q2 FAZA Q SET T STEP 5 (6) 0027 JMP TO 1 (2)")
79
Program P2 obroty CCW 0001 STEP INIT (1) 0002 THEN LOAD V100
TO TP1 0004 STEP (2) 0005 IF N T1 0006 THEN SET Q 'FAZA Q2 SET Q 'fAZA Q4 RESET Q 'FAZA Q1 RESET Q 'FAZA Q3 SET T1 0011 STEP (3) 0012 IF N T1 0013 THEN SET Q 'FAZA Q1 RESET Q 'FAZA Q2 SET T1 0016 STEP (4) 0017 IF N T1 0018 THEN SET Q 'FAZA Q3 RESET Q ‘FAZA Q4 SET T1 0021 STEP (5) 0022 IF N T1 0023 THEN SET Q 'FAZA Q2 RESET Q 'FAZA Q1 SET T1 0026 STEP (6) 0027 THEN JMP TO (2)
 0005 IF N T THEN SET Q2 FAZA Q SET Q4 fAZA Q RESET Q1 FAZA Q RESET Q3 FAZA Q SET T STEP 2 (3) 0012 IF N T THEN SET Q1 FAZA Q RESET Q2 FAZA Q SET T STEP 3 (4) 0017 IF N T THEN SET Q3 FAZA Q RESET Q4 ‘FAZA Q SET T STEP 4 (5) 0022 IF N T THEN SET Q2 FAZA Q RESET Q1 FAZA Q SET T STEP 5 (6) 0027 THEN JMP TO 1 (2)")
82
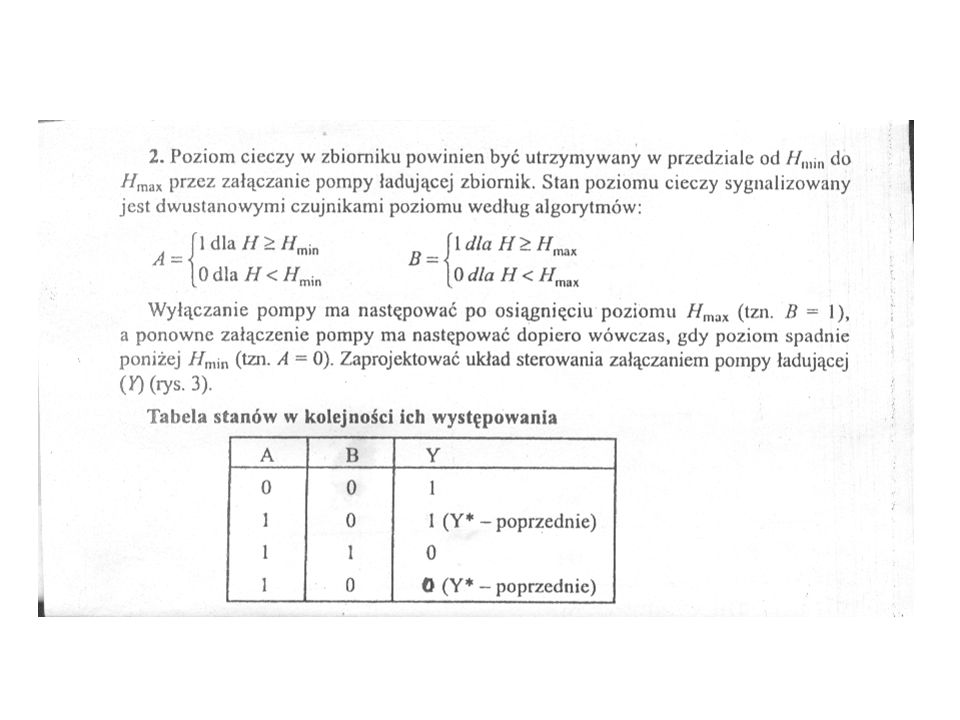
Zadanie 2 . Przy pomocy zestawu elementów elektro-pneumatycznych i sterownika FESTO 101 ( lub S7) zrealizować cyklogram przedstawiony na poniższym rysunku. Zadanie zrealizować w języku STL Zadanie nawiązuje do monostabilnych przycisków spełniających jednocześnie funkcje włącznika i wyłącznika – pierwsze naciśnięcie dale nam na wyjściu jedynkę logiczną, drugie ja kasuje. Takie rozwiązanie, stosowane m.in. w klawiaturach do komputerów klasy PC (CAPS LOCK, SCROLL LOCK i NUM LOCK) ma zastosowanie, np., gdy mamy ograniczoną liczbę wejść do sterownika (albo ograniczona liczbę przycisków), a musimy zapewnić ręczne załączanie i wyłączanie jakiś urządzeń.
 zrealizować cyklogram przedstawiony na poniższym rysunku. Zadanie zrealizować w języku STL. Zadanie nawiązuje do monostabilnych przycisków spełniających jednocześnie funkcje włącznika i wyłącznika – pierwsze naciśnięcie dale nam na wyjściu jedynkę logiczną, drugie ja kasuje. Takie rozwiązanie, stosowane m.in. w klawiaturach do komputerów klasy PC (CAPS LOCK, SCROLL LOCK i NUM LOCK) ma zastosowanie, np., gdy mamy ograniczoną liczbę wejść do sterownika (albo ograniczona liczbę przycisków), a musimy zapewnić ręczne załączanie i wyłączanie jakiś urządzeń.")
84
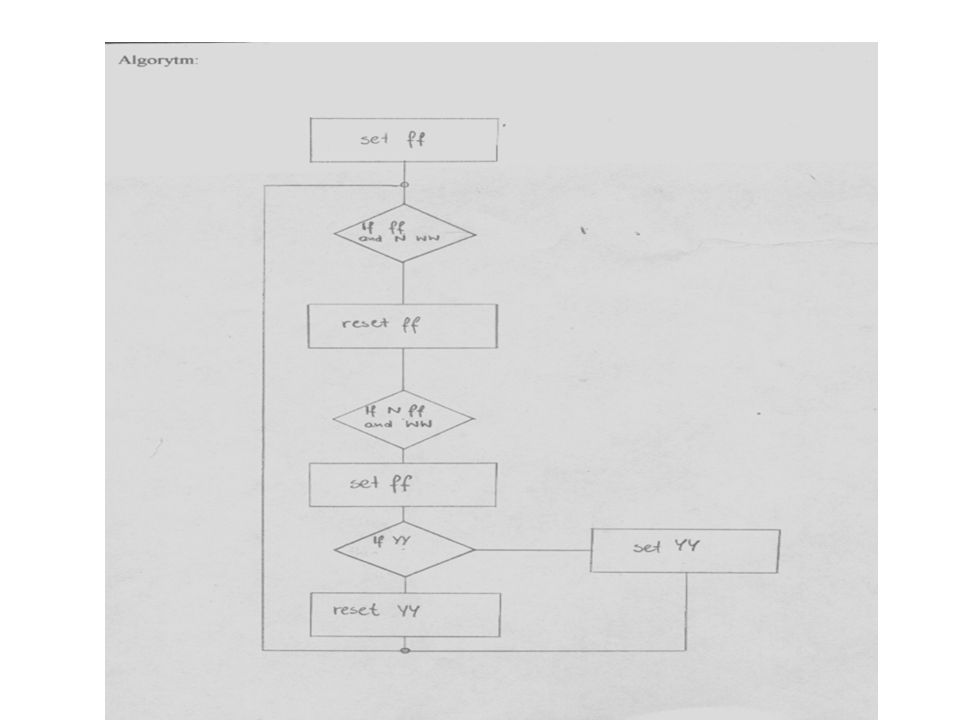
0001 STEP (1) 0002 THEN SET ff 'flaga 1 ====================================================================== 0003 STEP (2) 0004 IF ff 'flaga 1 AND N x 'start 0006 THEN RESET ff 'flaga 1 0007 STEP (3) 0008 IF N ff 'flaga 1 AND x 'start 0010 THEN SET ff 'flaga 1 0011 STEP (4) 0012 THEN LOAD N y 'silownik A TO y 'silownik A 0014 STEP (5) 0015 THEN JMP TO (1)
 0004 IF ff flaga AND N x1 start THEN RESET ff flaga STEP 30 (3) 0008 IF N ff flaga AND x1 start THEN SET ff flaga STEP 40 (4) 0012 THEN LOAD N y1 silownik A TO y1 silownik A STEP 50 (5) 0015 THEN JMP TO 10 (1)")










 C (przeniesienie)>")



>")










 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")

