Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
W1 dr inż. Tadeusz Wiśniewski p C6

2
Literatura - wykład Chorowski B., Werszko M.: Automatyzacja procesów przemysłowych, podstawy. Skrypt Politechniki Wrocławskiej. Wrocław r. Tuszyński K. : Regulacja automatyczna w inżynierii chemicznej WNT Warszawa r. Laboratorium: Pod redakcją W. Bolka i E. Ślifirskiej: Ćwiczania laboratoryjne z podstaw automatyki. Skrypt Politechniki Wrocławskiej. Wrocław r. Pod redakcją Ewy Ślifirskiej: Laboratorium sterowania procesami dyskretnymi. Skrypt Politechniki Wrocławskiej .Wrocław 1998 r. Literatura uzupełniajaca: Bogumiła Mrozek, Zbigniew Mrozek. Matlab i Simulink. Poradnik użytkownika. Wydawnictwo Helion 2004 Maciej Szymkat. Komputerowe wspomaganie w projektowaniu układów regulacji. WNT Warszawa 1993 Campbell D. :Dynamika układów . WNT Warszawa r. Cannon R.H. :Dynamika układów fizycznych. WNT Warszawa 1973 r

3
historia

5
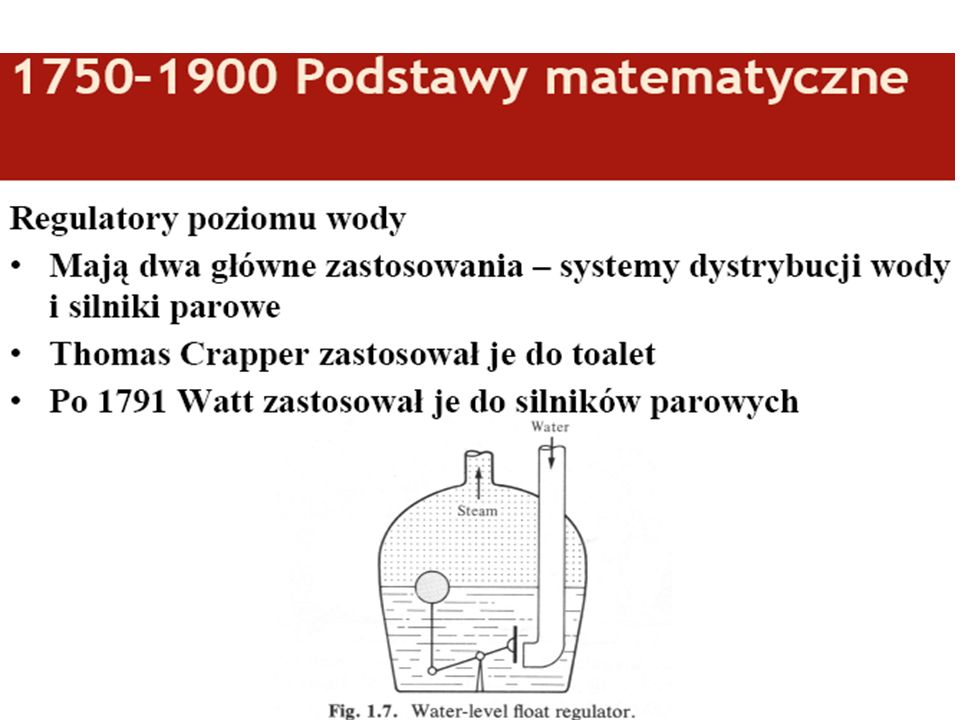
Historia (1780r.)
")
20
definicje AUTOMATYKA - dziedzina nauki i techniki zajmująca się zagadnieniami sterowania AUTOMATYCZNY- wykonującym określone celowe działanie bez bezpośredniego udziału człowieka AUTOMATYZACJA- zastosowanie układów automatycznych do praktycznej realizacji określonego celu sterowania SCHEMAT TECHNOLOGICZNY- rysunkowa dokumentacja techn,. ilustrująca przebieg procesu za pomocą symboli graficznych i ich połączeń SCHEMAT AUTOMATYZACJI= SCHEMAT TECHNOLOGICZNY z naniesionymi symbolami układów pomiarowych i automatyki UKŁAD PA = zbiór PUNKTÓW PA (zdalnych lub miejscowych) i linii sygnałowych (w/g normy PN/M 40007) CYBERNETYKA (Wiener N r.) ogólna nauka o sterowaniu (przepływie informacji) w organizmach żywych i maszynach SYSTEM - zbiór dowolnych elementów tworzących funkcjonalną całaość
 i linii sygnałowych (w/g normy PN/M 40007) CYBERNETYKA (Wiener N r.) ogólna nauka o sterowaniu (przepływie informacji) w organizmach żywych i maszynach. SYSTEM - zbiór dowolnych elementów tworzących funkcjonalną całaość.")
22
definicje

27
Członem nazywany jest elementarny system (obiekt sterowania) o jednym wejściu i jednym wyjściu (SISO). Wiele systemów przemysłowych cechuje wielowymiarowość wejść i wyjść (MIMO) Traktuje się je jednak często jako względnie autonomiczne procesy jednostkowe.
 Traktuje się je jednak często jako względnie autonomiczne procesy jednostkowe.")
28
definicje Klasyfikacje: Modele:
· o stałych skupionych (r. różniczkowe zwyczajne) bez uwzględnienia przestrzennej propagacji zjawiska · o stałych rozłożonych (r. różniczkowe cząstkowe) • Pełne (jedno- dwu- lub trójwymiarowe) • Zredukowane (np. tylko bilanse energii) nieliniowe liniowe
 bez uwzględnienia przestrzennej propagacji zjawiska. · o stałych rozłożonych (r. różniczkowe cząstkowe) • Pełne (jedno- dwu- lub trójwymiarowe) • Zredukowane (np. tylko bilanse energii) nieliniowe. liniowe.")
29
definicje Robotyka jest nauką o inteligentnym wykorzystaniu percepcji do działania. Obiektami robotyki są układy zdolne do samoczynnego i samodzielnego działania w zmieniającym się otoczeniu, zwane robotami autonomicznymi lub inteligentnymi.

30
definicje Bilanse: • Substancji (masy)-równanie ciągłości
RÓWNANIA BILANSOWE W MODELOWANIU DYNAMIKI ( np. WYMIENNIKÓW CIEPŁA) Bilanse: • Substancji (masy)-równanie ciągłości • Pędu (równanie ruchu) np. równanie Naviera- Stokes'a Sił Momentów (sił uogólnionych) Energii
 Bilanse: • Substancji (masy)-równanie ciągłości. • Pędu (równanie ruchu) np. równanie Naviera- Stokes a. Sił. Momentów (sił uogólnionych) Energii.")
31
definicje Sygnał – umowna cecha określonej wielkości fizycznej zawierająca informację. Linia łącząca – łącze zapewniające przekazywanie informacji bez zniekształceń. Człon – element o jednym sygnale wejściowym i jednym wyjściowym, przetwarzający informacje (mnożenie przez stałą, różniczkowanie, całkowanie) Wielkość regulowana (y) – cecha fizyczna obiektu, charakteryzująca stan obiektu i przyjęta jako regulowany parametr, np. prędkość obrotowa wału silnika, temperatura pomieszczenia, ciśnienie pary w walczaku itp. Wartość zadana (yz) – sygnał reprezentujący pożądaną w danej chwili wartość wielkości regulowanej (sterowanej).
 Wielkość regulowana (y) – cecha fizyczna obiektu, charakteryzująca stan obiektu i przyjęta jako regulowany parametr, np. prędkość obrotowa wału silnika, temperatura pomieszczenia, ciśnienie pary w walczaku itp. Wartość zadana (yz) – sygnał reprezentujący pożądaną w danej chwili wartość wielkości regulowanej (sterowanej).")
32
projektowanie

34
definicje Schemat blokowy układu automatycznej regulacji (UAR):
y – wielkość regulowana, ym. – wielkość mierzona (sygnał informujący o wielkości regulowanej), yz – wielkość zadana, w – sygnał wiodący, e – odchyłka regulacji (e = yz – ym.), u –wielkość regulująca, r – wymuszenie regulujące, z – wielkości zakłócające
, yz – wielkość zadana, w – sygnał wiodący, e – odchyłka regulacji (e = yz – ym.), u –wielkość regulująca, r – wymuszenie regulujące, z – wielkości zakłócające.")
35
definicje Układ regulacji. Podstawowym systemem rozpatrywanym w automatyce jest układ regulacji. Może on być przedstawiony w postaci tzw. schematu blokowego gdzie obiekty dynamiczne opisane są równaniami rózniczkowymi ( lub transmitancjami):
:")
37
narzędzia

39
definicje Odchyłka (błąd, uchyb) regulacji – różnica między wartością zadaną, a zmierzoną wartością wielkości regulowanej (e = yz – y). Przekształcenie Laplace’a – przekształcenie całkowe, polegające na przyporządkowaniu funkcji zmiennej czasowej f(t), nazywanej oryginałem, funkcji zmiennej zespolonej F(s), nazywanej transformatą. ,
, nazywanej oryginałem, funkcji zmiennej zespolonej F(s), nazywanej transformatą. ,")
40
definicje gdzie: s – zmienna; zespolona Transformata:

41
definicje x(t) y(t) Sposób przedstawiania obiektu na schematach:
x(t) – sygnał wejściowy, y(t) – sygnał wyjściowy OBIEKT
 – sygnał wejściowy, y(t) – sygnał wyjściowy. OBIEKT.")
42
definicje Transmitancja operatorowa – stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego, przy zerowych warunkach początkowych gdzie: Y(s) - transformata Laplace’a sygnału wyjściowego członu (obiektu), X(s) - transformata Laplace’a sygnału wejściowego członu (obiektu).
 - transformata Laplace’a sygnału wyjściowego członu (obiektu), X(s) - transformata Laplace’a sygnału wejściowego członu (obiektu).")
43
definicje Właściwości obiektu – wiążą się ze sposobem przetwarzania sygnałów wejściowych na wyjściowe, przy czym istotne są warunki przetwarzania, które mogą odpowiadać bądź stanom statycznym w obiekcie, bądź dynamicznym. Przez statyczne warunki przetwarzania rozumie się przetwarzanie w stanach ustalonych, w których zarówno sygnały wejściowe, jak i wyjściowe mają ustalone wartości, a ich pochodne przyjmują wartości zerowe.

44
definicje Związki między sygnałami wejściowymi a wyjściowymi w warunkach statycznego przetwarzania (w stanie ustalonym) określają właściwości statyczne obiektu, np.: (obiekt liniowy) (obiekt nieliniowy)
 określają właściwości statyczne obiektu, np.: (obiekt liniowy) (obiekt nieliniowy)")
45
definicje Związki między sygnałami wejściowymi a wyjściowymi obiektu w warunkach nieustalonych określają jego właściwości dynamiczne, które mogą być opisane za pomocą czasowych równań różniczkowych. Dla obiektów liniowych przyjęto opisywać te związki za pomocą równań różniczkowych liniowych o stałych współczynnikach.

46
definicje Jeśli założy się, że badany obiekt ma tylko jeden sygnał wejściowy i jeden wyjściowy, to równanie różniczkowe jest postaci:

47
definicje Stosując transformatę Laplace’a, z równania (6) dla zerowych warunków początkowych, uzyskuje się transmitancję operatorową obiektu: Dla obiektów realizowalnych fizycznie musi być spełniony warunek nm.

48
definicje Odpowiedź (charakterystyka ) skokowa jest to, przedstawiony w czasie, przebieg zmian sygnału wyjściowego obiektu (układu) pod wpływem wymuszenia skokowego. Wiąże się z tym pojęciem- tzw. metody skokowej, stosowana powszechnie w eksperymentalnym badaniu właściwości dynamicznych obiektów (elementów, układów). Uzyskana w wyniku eksperymentu odpowiedź skokowa umożliwia kwalifikowanie badanego obiektu (elementu, układu) do odpowiedniej klasy obiektu oraz może być podstawą do wyznaczania transmitancji operatorowej obiektu (elementu, układu).
 skokowa jest to, przedstawiony w czasie, przebieg zmian sygnału wyjściowego obiektu (układu) pod wpływem wymuszenia skokowego. Wiąże się z tym pojęciem- tzw. metody skokowej, stosowana powszechnie w eksperymentalnym badaniu właściwości dynamicznych obiektów (elementów, układów). Uzyskana w wyniku eksperymentu odpowiedź skokowa umożliwia kwalifikowanie badanego obiektu (elementu, układu) do odpowiedniej klasy obiektu oraz może być podstawą do wyznaczania transmitancji operatorowej obiektu (elementu, układu).")
49
definicje Na rysunku 2 podano nazwy elementów i sygnałów układu regulacji. W układzie tym można wyróżnić trzy zespoły: przejmujący informację (zespół pomiarowy), przetwarzający informację, czyli tzw. część centralna układu regulacji, do której należą: zadajnik, sumator i regulator, wykonawczy zawierający siłownik i nastawnik. Elementy układu regulacji są powiązane liniami łączy , których zadaniem jest przesyłanie sygnałów (informacji) między elementami.
, przetwarzający informację, czyli tzw. część centralna układu regulacji, do której należą: zadajnik, sumator i regulator, wykonawczy zawierający siłownik i nastawnik. Elementy układu regulacji są powiązane liniami łączy , których zadaniem jest przesyłanie sygnałów (informacji) między elementami.")
Podobne prezentacje





>")











 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji (c.d.)>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")


>")