Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Pomiary przesunięcia liniowego i kątowego, prędkości obrotowej, siły i naprężeń, temperatury
Marcin Sobotka 2007/2008

2
Czujnik rezystancyjny
Potencjometr to najbardziej znany z czujników przesunięcia. Szczotka , czyli styk ślizgowy wykonuje ruch prostoliniowy, obrotowy lub śrubowy przez co przyjmuje położenie przesunięcia mierzonego. Najczęściej potencjometr zbudowany jest z cienkiego, izolowanego drutu oporowego nawiniętego na izolacyjnej płytce lub pręcie. (na rys. różne typy potencjometrów obrotowych)
")
3
Schemat potencjometrycznego pomiaru przesunięcia
Jeżeli potencjometr będzie wykonany tak jak na schemacie- czyli będzie nawinięty na karkasie o stałym przekroju, to rezystancja przypadająca na jednostkę długość będzie stała. Napięcie na styku ślizgowym będzie się zmieniać proporcjonalnie do zajmowanej przez niego pozycji. U wy= Uz * x/l Zależność ta jest słuszna tylko, gdy potencjometr nie jest obciążony.

4
Przykładowy czujnik rezystancyjny Typ E/R-1/1 (do zastosowania w wodzie)
")
5
Czujnik indukcyjnościowy
Czujnik indukcyjności ma bardzo szerokie zastosowanie. Przetwarza przesunięcie liniowe lub kątowe jego części ruchomej na zmianę indukcyjności własnej lub wzajemnej cewek czujnika. Najprostszy czujnik indukcyjnościowy zbudowany jest z cewki ( powietrznej lub nawiniętej na ferromagnetycznym rdzeniu) i ruchomego rdzenia ferromagnetycznego.
 i ruchomego rdzenia ferromagnetycznego.")
6
Różne rodzaje czujników wraz z charakterystykami
a) solenoidalny b) o zmiennej długości szczeliny c) o zmiennej powierzchni szczeliny
 solenoidalny b) o zmiennej długości szczeliny c) o zmiennej powierzchni szczeliny.")
7
Czujniki transformatorowe
Wcześniej opisane czujniki wykorzystywały zmiany indukcyjności własnej. Czujniki transformatorowe wykorzystują zależność indukcyjności wzajemnej od przesunięcia rdzenia. Czujnik indukcyjnościowe stosuje się do pomiarów przesunięć w zakresie od setnych części, nawet do kilkudziesięciu milimetrów. Największą dokładność osiągają czujniki transformatorowe. Pozwalają uzyskać dokładność nawet do tysięcznych części milimetra.

8
Czujniki pojemnościowe
Czujnikiem takim jest kondensator, w którym pojemność może zmieniać się na skutek przesunięcia któregoś z elementów. C= E*Eo* S/d Er- przenikalność względna Eo- przenikalność dielektryczna próżni Zmiana pojemności występuje gdy zmieniamy jeden z elementów wzoru. Zmianom tym w takim razie może ulegać powierzchnia czynna lub odległość między okładzinami lub przenikalność względna dielektryka.

9
Schematy czujnika pojemnościowego
a) płaski o zmiennej odległości między okładzinami b) obrotowy o zmiennej powierzchni okładzin c) płaski o zmiennej przenikalności względnej
 płaski o zmiennej odległości między okładzinami b) obrotowy o zmiennej powierzchni okładzin c) płaski o zmiennej przenikalności względnej.")
10
Czujniki ultradźwiękowe
Czujniki ultradźwiękowe działają na zasadzie radaru -emitują wiązkę promieniowania (fal ultradźwiękowych), która po odbiciu od obiektu jest odbierana przez ten sam przyrząd. W czujnikach odległości mierzy się czas między wysłaniem i odbiorem impulsu drgań ultradźwiękowych. Czujniki ultradźwiękowe są stosowane do wykrywania obiektów, detekcji poziomów cieczy przezroczystych i nieprzeźroczystych przede wszystkim w środowiskach gdzie ze względu na znaczne zabrudzenie nie jest możliwe zastosowanie czujników optycznych. Zasada pomiaru tych czujników opiera się na pomiarze czasu upływającego między wysłanym sygnałem ultradźwiękowym a odebranym echem odbitym od przeszkody. Czas ten jest proporcjonalny do odległości wykrywanego obiektu
, która po odbiciu od obiektu jest odbierana przez ten sam przyrząd. W czujnikach odległości mierzy się czas między wysłaniem i odbiorem impulsu drgań ultradźwiękowych. Czujniki ultradźwiękowe są stosowane do wykrywania obiektów, detekcji poziomów cieczy przezroczystych i nieprzeźroczystych przede wszystkim w środowiskach gdzie ze względu na znaczne zabrudzenie nie jest możliwe zastosowanie czujników optycznych. Zasada pomiaru tych czujników opiera się na pomiarze czasu upływającego między wysłanym sygnałem ultradźwiękowym a odebranym echem odbitym od przeszkody. Czas ten jest proporcjonalny do odległości wykrywanego obiektu.")
11
Czujniki optoelektroniczne
Czujniki optoelektroniczne są elementami automatyki, których działanie opiera się na zasadzie wysyłania wiązki promieni świetlnych przez nadajnik i odbieraniu jej przez odbiornik. Czujniki te reagują na obiekty, które przecinają wiązkę światła pomiędzy nadajnikiem a odbiornikiem lub na wiązkę odbitą od obiektu. Stosowane są m.in. do kontroli położenia ruchomych części maszyn, identyfikacji obiektów znajdujących się w zasięgu działania czujników, np. przesuwające się taśmy transportowe, określenie poziomu cieczy i materiałów sypkich.

12
Pomiary prędkości obrotowej
1) Prądnice tachometryczne to małe maszyny elektryczne przeznaczone do pomiaru prędkości obrotowej lub przetwarzania ruchu obrotowego na wielkość elektryczną. Ze względu na zasadę działania prądnice tachometryczne mogą być wykonywane jako maszyny prądu stałego lub zmiennego (indukcyjne i synchroniczne). Zmiana kierunku wirowania powoduje w przypadku prądu stałego zmianę biegunowości, a w przypadku prądu przemiennego zmianę fazy napięcia wyjściowego.
 Prądnice tachometryczne to małe maszyny elektryczne przeznaczone do pomiaru prędkości obrotowej lub przetwarzania ruchu obrotowego na wielkość elektryczną. Ze względu na zasadę działania prądnice tachometryczne mogą być wykonywane jako maszyny prądu stałego lub zmiennego (indukcyjne i synchroniczne). Zmiana kierunku wirowania powoduje w przypadku prądu stałego zmianę biegunowości, a w przypadku prądu przemiennego zmianę fazy napięcia wyjściowego.")
13
Prądnice tachometryczne mogą być stosowane :
do pomiaru prędkości obrotowej do pomiaru liczby obrotów lub drogi jako źródło napięcia sterującego w układach regulacji i sterowania

14
Prądnica tachometryczna prądu stałego
Składa się z części nieruchomej zwanej stojanem i z części ruchomej, zwanej wirnikiem. Wirnik służy do wytwarzania prądu elektrycznego. Wiruje on w polu magnetycznym wytwarzanym przez magnes stały lub uzwojenie stojana zasilane zewnętrznym źródłem prądu stałego. Napięcie elektryczne jest odbierane z komutatora znajdującego się na osi wirnika przy pomocy szczotek grafitowych, umieszczonych na stojanie.

15
Budowa prądnicy tachometrycznej prądu stałego
Budowa prądnicy tachometrycznej prądu stałego: a) ze wzbudzeniem elektromagnetycznym ; b) ze wzbudzeniem magnesem trwałym; 1 – uzwojenie wzbudzenia, 2 – magnes trwały , 3 – nabiegunniki , 4 – wirnik , 5 – komutator , 6 – szczotki
 ze wzbudzeniem elektromagnetycznym ; b) ze wzbudzeniem magnesem trwałym; 1 – uzwojenie wzbudzenia, 2 – magnes trwały , 3 – nabiegunniki , 4 – wirnik , 5 – komutator , 6 – szczotki.")
16
Enkodery Enkoder to urządzenie przetwarzające przesunięcie i pozycję kątową na sygnał elektryczny. Enkodery powszechnie wykorzystuje się we wszelkiego rodzaju maszynach i liniach produkcyjnych do precyzyjnego pomiaru prędkości, przesunięcia, odległości czy przebytej drogi. Stosując enkoder można zmierzyć obrót dokonany przez dany element – część maszyny albo poddawany obróbce detal, ilość wykonanych obrotów, jak też za pośrednictwem przekładni mechanicznych również przebytą odległość w ruchu postępowym.

17
Enkoder absolutny Enkodery absolutne Zasada działania opiera się na przyporządkowaniu odpowiednim wartościom kąta, kodowanych wartości liczbowych. Na wałku napędowym znajduje się tarcza kodowa, która zawiera w formie kodu wartości liczbowe odpowiadające przesunięciom kątowym. Pozwala to na zadawanie wartości absolutnych w dowolnym momencie, bez konieczności porównywania z punktem odniesienia Enkoder absolutny pozwala określić dokładną informację o pozycji po ponownym uruchomieniu, gdy zanikło napięcie zasilania systemu lub enkodera. Jeżeli po zaniku zasilania miał miejsce jakikolwiek ruch mechaniczny, faktyczna pozycja mechaniczna jest odczytana natychmiast po odzyskaniu zasilania. Dostępne są dwa rodzaje enkoderów absolutnych: jednoobrotowe i wieloobrotowe. W enkoderze jednoobrotowym, dzielony jest jeden obrót wału na odpowiednią ilość kroków i pomiar wielkości powtarza się po jednym obrocie. W enkoderze wieloobrotowym pomiar wielkości jest wynikiem pozycji kątowej i liczby obrotów wału.

18
Pomiary sił i naprężeń 1) Dynamometr- to przyrząd do pomiaru wartości działającej siły. Zasada jego działania najczęściej opiera się na prawie Hooke'a, które mówi, że odkształcenie elementu sprężystego jest proporcjonalne do wartości działającej siły. W zależności od konstrukcji rozróżnia się dynamometry mechaniczne, hydrauliczne i elektromechaniczne. (na rysunku dynamometr sprężynowy)
 Dynamometr- to przyrząd do pomiaru wartości działającej siły. Zasada jego działania najczęściej opiera się na prawie Hooke a, które mówi, że odkształcenie elementu sprężystego jest proporcjonalne do wartości działającej siły. W zależności od konstrukcji rozróżnia się dynamometry mechaniczne, hydrauliczne i elektromechaniczne. (na rysunku dynamometr sprężynowy)")
19
Przetworniki piezoelektryczne
2) Piezoelektryczne przetworniki to elementy techniczne, w których wykorzystuje się odwrotne zjawisko piezoelektryczne dla bezpośredniego przetworzenia energii mechanicznej w energię elektryczną (lub proste zjawisko piezoelektryczne dla przeciwnej zamiany).
 Piezoelektryczne przetworniki to elementy techniczne, w których wykorzystuje się odwrotne zjawisko piezoelektryczne dla bezpośredniego przetworzenia energii mechanicznej w energię elektryczną (lub proste zjawisko piezoelektryczne dla przeciwnej zamiany).")
20
Tensometry rezystancyjne
3) Tensometr rezystancyjny służy do pomiaru odkształceń mechanicznych. W tensometrze tym rezystancja zależy od odkształcenia mechanicznego. Drut poddany działaniu siły F odkształca się zwiększając długość o delta l i zmniejszając przekrój o delta S. Jeżeli rezystancja drutu o rezystywności p wynosi --- To pod działaniem siły F, pod wpływem zwiększania długości l i zmniejszaniu przekroju S rezystancja zwiększa się o delta R. Zmiana rezystancji może nastąpić podczas zmiany rezystywności. Jednak taka zmiana jest pomijalna dla metali i ma znaczenie tylko w tensometrach półprzewodnikowych, które zbudowane są z krzemu lub germanu (tensometry te mają czułość ok razy większą niż metaliczne).
 Tensometr rezystancyjny służy do pomiaru odkształceń mechanicznych. W tensometrze tym rezystancja zależy od odkształcenia mechanicznego. Drut poddany działaniu siły F odkształca się zwiększając długość o delta l i zmniejszając przekrój o delta S. Jeżeli rezystancja drutu o rezystywności p wynosi --- To pod działaniem siły F, pod wpływem zwiększania długości l i zmniejszaniu przekroju S rezystancja zwiększa się o delta R. Zmiana rezystancji może nastąpić podczas zmiany rezystywności. Jednak taka zmiana jest pomijalna dla metali i ma znaczenie tylko w tensometrach półprzewodnikowych, które zbudowane są z krzemu lub germanu (tensometry te mają czułość ok razy większą niż metaliczne).")
21
Różne rodzaje tensometrów

22
Układy pomiarowe Włączenia jednego, dwóch lub czterech tensometrów sprawia że prąd Ig = 0. jeżeli jednak na tensometry będą działać odpowiednie naprężenia to prąd lub napięcie będzie różne od zera. Występują 3 przypadki włączenia tensometrów. 1) Z jednym tensometrem (układ pół mostka) rzadko używany , ponieważ charakteryzuje się słabą czułością S=0,25
 Z jednym tensometrem (układ pół mostka) rzadko używany , ponieważ charakteryzuje się słabą czułością S=0,25.")
23
2) Z dwoma tensometrami (układ pół mostka) – na każdy z tensometrów działają naprężenia o przeciwnych kierunkach (np. ściskanie i rozciąganie) , mają czułość równą 0,5 i mniejszą nieliniowość.
 , mają czułość równą 0,5 i mniejszą nieliniowość..")
24
3) Z czterema tensometrami – występują w nim 2 tensometry o dodatnim kierunku zmian rezystancji i dwa o ujemnym kierunku zmian rezystancji. Układ ten charakteryzuje się największą czułością równą 1 .

25
Tensometry półprzewodnikowe
Tensometry półprzewodnikowe dzielą się na dwa rodzaje : - monokrystaliczne ,wykonane z cienkich ( o grubości ok mm) pasków wycinanych z monokryształów krzemu lub germanu - cienkowarstwowe, otrzymywane przez naparowywanie bizmutu, germanu lub tensometry półprzewodnikowe na elastycznym podłożu neutralnym
 pasków wycinanych z monokryształów krzemu lub germanu. - cienkowarstwowe, otrzymywane przez naparowywanie bizmutu, germanu lub tensometry półprzewodnikowe na elastycznym podłożu neutralnym.")
26
Pomiary temperatury 1) Przeliczenie ze stopni Celsjusza na stopnie Kelvina : TK=TC+273,16 TC- stopnie Celsjusza TK- stopnie Kelvina 2) Przeliczenie ze stopni Kelvina na stopnie Celsjusza: TC= 5/9 ( TF – 32)
 Przeliczenie ze stopni Kelvina na stopnie Celsjusza: TC= 5/9 ( TF – 32)")
27
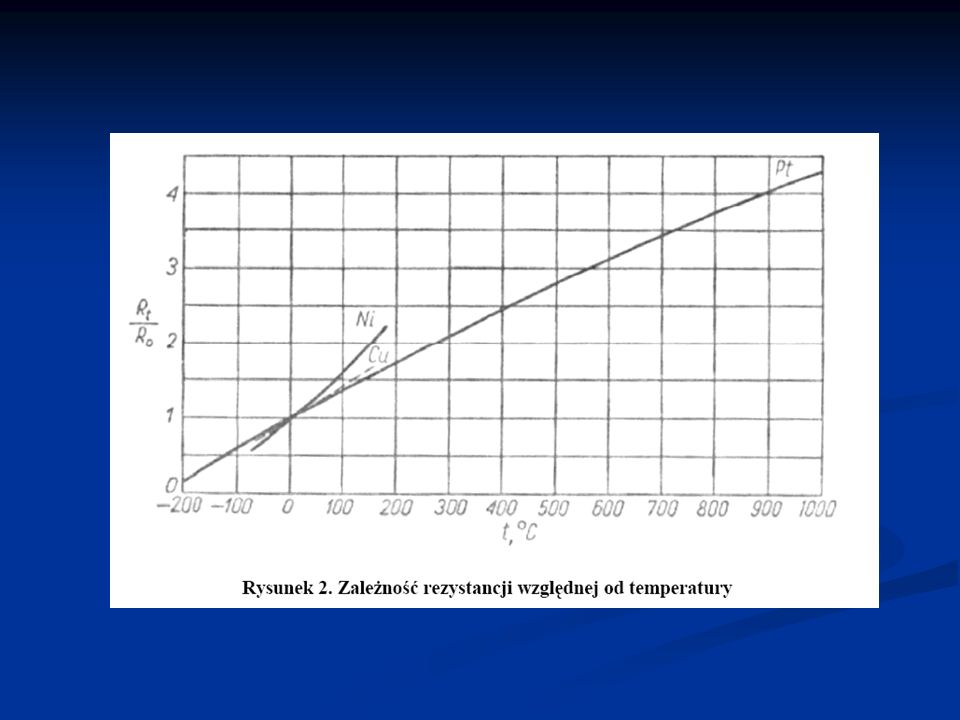
Termometr rezystancyjny
Termometr rezystancyjny – przyrząd do pomiaru temperatury w którym wykorzystywana jest zależność rezystancji metali ( np. platyny, niklu) oraz półprzewodników od temperatury. Przykładowe oporniki : -Pt 100 – opornik platynowy o wartości pomiarowej 100 Ω w 0 °C -Pt 500 – opornik platynowy o wartości pomiarowej 500 Ω w 0 °C -Pt1000 – opornik platynowy o wartości pomiarowej 1000 Ω w 0 °C -Ni opornik niklowy o wartości pomiarowej 100 Ω w 0 °C
 oraz półprzewodników od temperatury. Przykładowe oporniki : -Pt 100 – opornik platynowy o wartości pomiarowej 100 Ω w 0 °C. -Pt 500 – opornik platynowy o wartości pomiarowej 500 Ω w 0 °C. -Pt1000 – opornik platynowy o wartości pomiarowej 1000 Ω w 0 °C. -Ni opornik niklowy o wartości pomiarowej 100 Ω w 0 °C.")
28
Dla czujników rezystancyjnych metalowych przyjmuje się następujące równanie opisujące zależność zmian rezystancji od temperatury. Gdzie: -Ro - rezystancja czujnika w temp odniesienia -to -temperatura odniesienia -α -współczynnik zmiany rezystancji z temperaturą

30
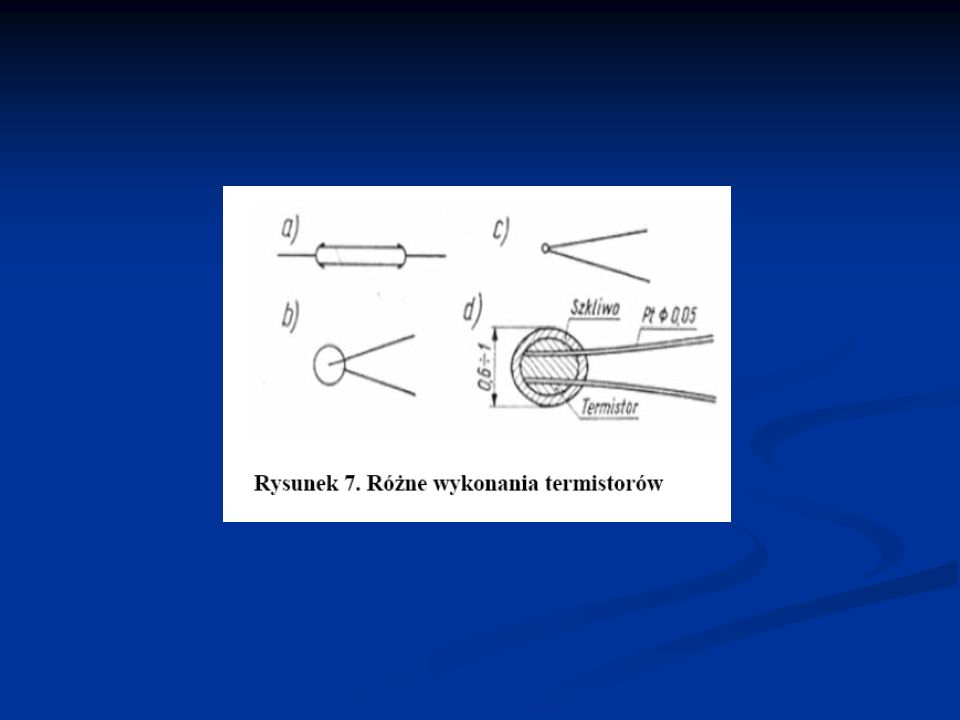
Termistory Termistory to termorezystory półprzewodnikowe wykonywane z mieszanin tlenków metali w kształcie płytek, prętów i kulek z metalowymi wyprowadzeniami. Rezystancja termistorów w temperaturze 20 stopni C wynosi R=20 Ω do 200kΩ . Czułość termistorów w zakresie temperatury od -100 °C do +50°C jest ok. 10 razy większa niż czułość termorezystorów metalowych.

32
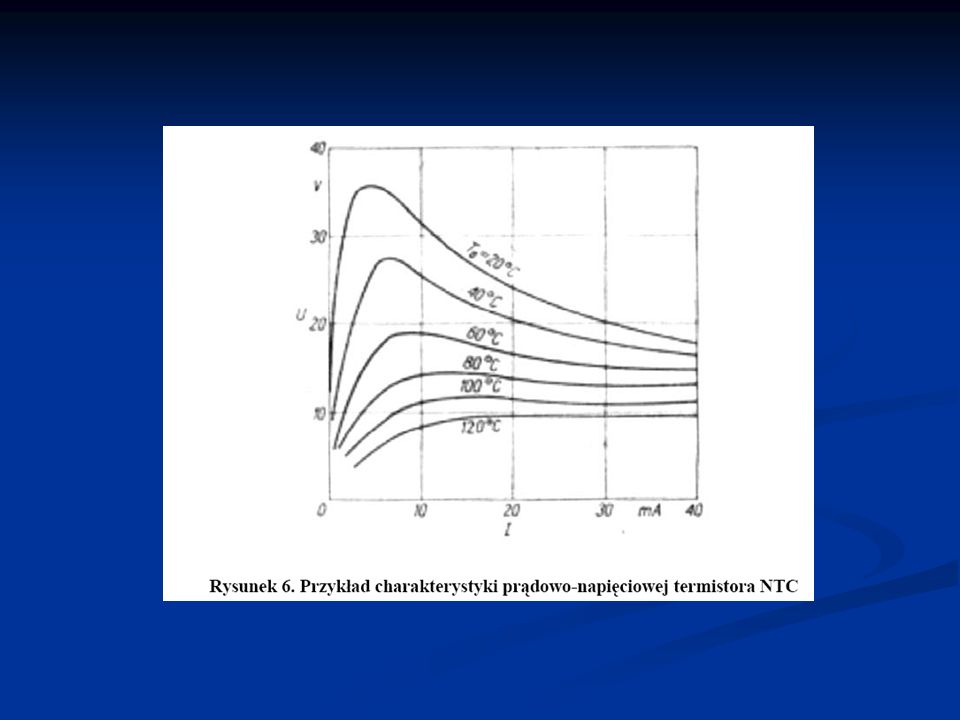
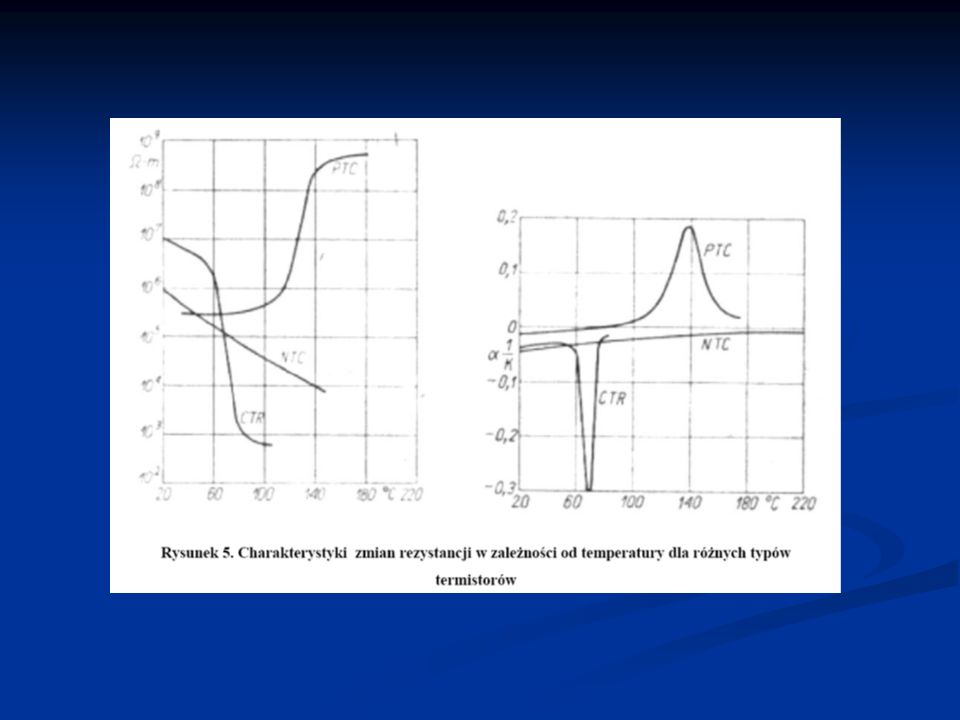
Termistory NTC Termistory NTC (Negative Temperature Coefficient- ujemny temperaturowy współczynnik) . Rezystancja tych termistorów maleje wykładniczo ze wzrostem temperatury wg zależności : Gdzie : A, B są stałymi zależnymi od rodzaju materiału i wymiarów półprzewodnika T jest bezwzględną temperaturą termistora
 . Rezystancja tych termistorów maleje wykładniczo ze wzrostem temperatury wg zależności : Gdzie : A, B są stałymi zależnymi od rodzaju materiału i wymiarów półprzewodnika. T jest bezwzględną temperaturą termistora.")
34
Termistory PTC Termistory PTC ( Positive Temperature Coefficient) to elementy o dodatnim temperaturowym współczynniku rezystancji. To tzw. pozystor -wzrost temperatury powoduje wzrost rezystancji .
 to elementy o dodatnim temperaturowym współczynniku rezystancji. To tzw. pozystor -wzrost temperatury powoduje wzrost rezystancji .")
35
Termistory CTR Termistory CTR (Critical Temperature Resistor) termistory o bardzo dużym dodatnim temperaturowym współczynniku rezystancji w bardzo małym przedziale temperatury. Są stosowane w układach stabilizacji temperatury.
 termistory o bardzo dużym dodatnim temperaturowym współczynniku rezystancji w bardzo małym przedziale temperatury. Są stosowane w układach stabilizacji temperatury.")
38
Charakterystyka zależności U = f (I) przy T = const. dla termistora
 przy T = const. dla termistora")
39
Czujniki termoelektryczne
Czujniki termoelektryczne (ogniwa termoelektryczne), których działanie jest oparte na zjawisku powstawania siły elektromotorycznej w miejscu styku dwóch metali, stosowane do pomiarów temperatury i energii świetlnej, zwłaszcza w zakresie promieniowania podczerwonego.
, których działanie jest oparte na zjawisku powstawania siły elektromotorycznej w miejscu styku dwóch metali, stosowane do pomiarów temperatury i energii świetlnej, zwłaszcza w zakresie promieniowania podczerwonego.")
40
Termoelementy Termoelementy należą do najpopularniejszych przyrządów do pomiaru temperatury. Jest to spowodowane bardzo szerokim zakresem pomiarowym, możliwością wykonywania pomiarów punktowych, dużą ilością różnych wykonań specjalnych. Działanie termoelementu oparte jest o odkryte przez Seebecka zjawisko termoelektryczne. Polega ono na przepływie prądu elektrycznego w obwodzie zamkniętym utworzonym przez dwa różne metale (na rys nikiel-aluminium z niklem-chromem). Warunkiem przepływu prądu jest różnica temperatur spoin tych metali. Jeżeli taki obwód zostanie otwarty to na końcach otrzymamy siłę termoelektryczną zależną od różnicy temperatur i rodzaju użytych metali.
. Warunkiem przepływu prądu jest różnica temperatur spoin tych metali. Jeżeli taki obwód zostanie otwarty to na końcach otrzymamy siłę termoelektryczną zależną od różnicy temperatur i rodzaju użytych metali.")
41
Termopara Na styku dwu metali A i B pojawia się różnica potencjałów. W oznaczeniu termopary zawsze jako pierwszy wymienia się metal o wyższym potencjale.

43
Pirometry Pirometry służą do pomiarów temperatury metodą bezstykową, promieniowanie cieplne jest skupiane za pomocą soczewki na czujniku promieniowania cieplnego (fototranzystor, termorezystor, termoelement). Proste pirometry mierzą ilość energii emitowanej poprzez pomiar temperatury elementu, na który pada promieniowanie. Do pomiaru temperatur powyżej 600°C używane są pirometry optyczne
. Proste pirometry mierzą ilość energii emitowanej poprzez pomiar temperatury elementu, na który pada promieniowanie. Do pomiaru temperatur powyżej 600°C używane są pirometry optyczne.")
44
Źródła 1. J. Kostro - Pomiary wielkości nieelektrycznych metodami elektrycznymi 2. J. Kostro - Elementy, urządzenia i układy automatyki 3. J. Parchański - Miernictwo elektryczne i elektroniczne 4. Materiały z lekcji przedmiotów zawodowych. LINKI:

Podobne prezentacje