Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Pierścieniowy elektryczny zespół napędowy – badania prototypu
Autorzy: Piotr Grymajło Leszek Matuszewski

2
Cel Projektu Celem projektu jest zbadanie własności i celowości stosowania nowoczesnych łożysk elektromagnetycznych dla pędnika śrubowego w prototypowej wersji silnika pierścieniowego synchronicznego z magnesami z ziem rzadkich. Łożyska elektromagnetyczne generują siły, które utrzymują wirnik w stanie lewitacji. Podstawową zaletą łożysk magnetycznych jest: bardzo mały moment oporowy, wyeliminowanie instalacji chłodzenia oraz smarowania niezbędnych do prawidłowej pracy maszyn wirnikowych z łożyskami tocznymi i ślizgowymi, które się zużywają Żywotność urządzeń łożyskowanych magnetycznie jest nieporównywalna z innymi.

3
Gdzie się stosuje łożyska elektromagnetyczne ?
w łożyskowaniu wirników maszyn przepływowych (sprężarki, pompy, turbiny), w turbinowych silnikach lotniczych, w silnikach elektrycznych, w łożyskowaniu wysokoobrotowych elektrowrzecion precyzyjnych obrabiarek, w maszynach i urządzeniach pracujących w wysokiej próżni i technice kriogenicznej do transportu skroplonych gazów (tlen, metan, argon ,hel, itp.), w maszynach, gdzie wymagana jest absolutna czystość i sterylność (medycyna – rozruszniki serca, przemysł spożywczy i farmaceutyczny), i w wielu innych
, w turbinowych silnikach lotniczych, w silnikach elektrycznych, w łożyskowaniu wysokoobrotowych elektrowrzecion precyzyjnych obrabiarek, w maszynach i urządzeniach pracujących w wysokiej próżni i technice kriogenicznej do transportu skroplonych gazów (tlen, metan, argon ,hel, itp.), w maszynach, gdzie wymagana jest absolutna czystość i sterylność (medycyna – rozruszniki serca, przemysł spożywczy i farmaceutyczny), i w wielu innych.")
4
Korzyści wynikające z zastosowania pędnika pierścieniowego łożyskowanego magnetycznie:
Konstrukcja umożliwiająca łatwy montaż na istniejących jednostkach – zwiększenie manewrowości przy mniejszych nakładach niż w przypadku tradycyjnych modernizacji, Opracowanie nowego typu napędu o wysokiej sprawności, dynamice i żywotności, Wyznaczenie zestawu parametrów dla modelu matematycznego nowego typu zespołu napędowego do celów projektowych i komputerowej symulacji działania

5
Niezbędne zadania i najważniejsze zagadnienia badawcze:
Zaprojektowanie, wykonanie i badania łożyska magnetycznego sterowanego Wykonanie prototypu silnika pierścieniowego łożyskowanego magnetycznie Wykonanie uszczelnienia ferrofluidalnego Integracja układu i wstępne badania z pędnikiem Badania eksperymentalne nowego typu pędnika

6
Ogólna koncepcja zespołu napędowego z pierścieniowym pędnikiem śrubowym w wersji z łożyskiem elektromagnetycznym wirnika

7
Wersja zgłoszona do opatentowania

8
Rozkład sił

9
Siłownik elektromagnetyczny

13
Animacja śruba

15
Rozkład sił - animacja ‘siły’

16
KONCEPCJA NOWEJ WERSJI PO BADANIACH WSTĘPNYCH

17
Zespół napędowy podczas badań w tunelu kawitacyjnym IMP PAN

18
Układ pomiarowy IMP PAN dynamometr opracowany przez J. Koronowicza

19
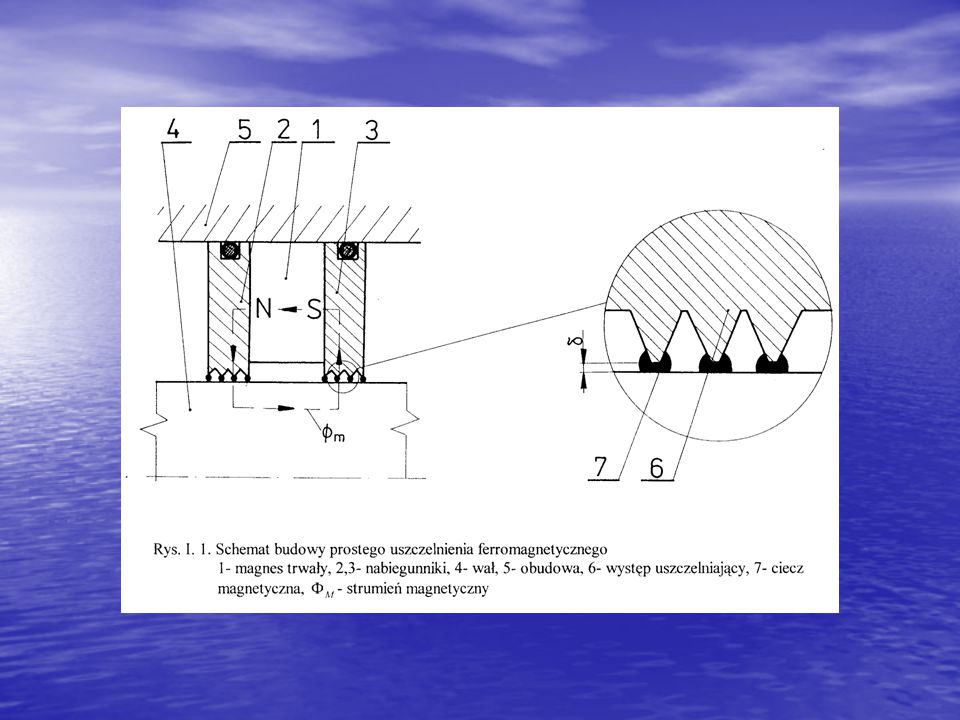
Opracowanie i badania parametrów uszczelnień ferrofluidalnych
Obok badań całkowicie nowatorskich łożyska również badania uszczelnień ferroluidalnych mają podobny charakter. Dotychczas tego rodzaju uszczelnienia są używane w środowisku gazowym. Jednak po zmianie cieczy bazowych jest bardzo wysokie prawdopodobieństwo pełnego sukcesu. Jedynym parametrem dotychczas niewiadomym, ale decydującym o jakości całego zespołu jest trwałość uszczelnienia.

21
Przekrój węzła uszczelniającego z cieczami ferrofluidalnymi

22
Moment tarcia Mt w zależności od liczby występów uszczelniających Z, =0,1mm, t=50°C, n=3000; 6000; 9000 obr/min.

23
Ciśnienie przebicia pkr oraz zjawisko wielokrotnego uszczelniania („reseal”)
")
24
Ciśnienie przebicia pkr w zależności od indukcji magnetycznej Bśr w uszczelnieniu z cieczą magnetyczną BM-30/57. Z=8, =0,1; 0,2; 0,3mm, n=3000obr/min.

25
Ciśnienie przebicia pkr w zależności od prędkości obrotowej wału n w uszczelnieniu z cieczą magnetyczną BM30. Z=2, Bśr=0,6T, =0,1; 0,2; 0,3mm.

26
Głowica do prób szybkoobrotowych – widok dynamometru

27
Widok ogólny stanowiska

28
Widok szczeliny

29
Model matematyczny pędnika morskiego łożyskowanego magnetycznie
Założenia i przeznaczenie modelu, Kinematyka węzła magnetycznego, Część mechaniczna, Część elektromagnetyczna, Część hydrostatyczna i hydrodynamiczna,

30
Model matematyczny: założenia
Cel modelowania: pomoc przy projektowaniu urządzenia, badania symulacyjne, synteza sterowania

31
Model matematyczny: kinematyka
Do opisu spoczywającego pędnika przyjęto dwa układy współrzędnych: układ współrzędnych związany ze stojanem pędnika - Ws Układ współrzędnych związany z wirnikiem pędnika - Wp W układze Ws zdefiniowano wektor orientacji i położenia wirnika x=[x,y,z,φ,θ,ψ]T W układzie Wp zdefiniowano wektor prędkości v=[X,Y,Z,K,M,N]T Zdefiniowano również macierze transformacji prostej i odwrotnej, pomiędzy prędkościami w Wp i Ws: v =Rsw[6x6] dx/dt dx/dt= Rws[6x6] v

32
Model matematyczny: kinematyka I

33
Model matematyczny: część mechaniczna
Dynamika bryły sztywnej o 6-ciu stopniach swobody Gdzie: M [6x6] – macierz bezwładności, C[6x6] – macierz przyśpieszeń dośrodkowych i Coriolisa τ wektor sił wypadkowych

34
Model matematyczny: część elektromechaniczna

35
Model matematyczny: Zestawienie
Gdzie: v[6x1], x[6x1], i[8x1], - wektory prędkości, położenia wirnika oraz prądu cewek wyznaczają 20-sto wymiarową przestrzeń stanu

36
wektory

37
Stabilizacja aktywnego zawieszenia magnetycznego
Sformułowanie problemu: Zbudować taki algorytm sterowania, który na podstawie pomiaru odległości wirnika od stojana, steruje napięciami poszczególnych cewek łożyska, tak aby wirnik pozostał w dozwolonym otoczeniu punktu pracy. Algorytm musi umożliwiać stabilizację 5 stopni swobody, dla całego zakresu prędkości obrotowej pędnika.

38
Stabilizacja aktywnego zawieszenia magnetycznego I
Główne problemy: Nieliniowość zjawisk elektrodynamicznych, Nieliniowość równań kinematyki, Silne sprzężenia skrośne pomiędzy poszczególnymi torami regulacji położenia, Zmienne w czasie zakłócenia, Niedostępność pomiaru wektora prędkości ruchu, Układ pomiarowy: nieliniowe transformacje, nadmiarowość czujników, Sprawność, Ograniczenia elementów wykonawczych, Niedokładność wykonania urządzenia,

39
Stabilizacja aktywnego zawieszenia magnetycznego II
Proponowane rozwiązania: Układ 5 niezależnych regulatorów typu PID (SISO) + nieliniowa transformacja odsprzęgająca, Podejście nieliniowe: linearyzacja poprzez sprzężenie zwrotne (rozszerzenie istniejących wyników badań na przypadek łożyska wielowymiarowego) Nieliniowa estymacja wektora prędkości wirnika, oraz wektora zakłóceń
 + nieliniowa transformacja odsprzęgająca, Podejście nieliniowe: linearyzacja poprzez sprzężenie zwrotne (rozszerzenie istniejących wyników badań na przypadek łożyska wielowymiarowego) Nieliniowa estymacja wektora prędkości wirnika, oraz wektora zakłóceń.")
40
Stanowisko prototypowe
Opis prototypu Część mechaniczna, Część elektryczna, Część pomiarowa, Część sterująca. Wnioski, dalsze prace…

41
Badania prototypowe: część mechaniczna

42
Badania prototypowe: część elektryczna
W fazie projektu: Ośmiokanałowy, bipolarny zasilacz impulsowy sterowany mikroprocesorowo z możliwością pracy w trybie zasilacza napięciowego/prądowego.

43
Badania prototypowe: część sterująca
Moduł procesora sygnałowego SBC67 wyposażony w zmienno przecinkowy procesor sygnałowy firmy Texas Instruments TMS320C6701, w którym zawarto: 64 kB pamięci programu i 64 kB pamięci danych, 32 bitowy licznik/timer,4 kanały DMA, 32 kB pamięć SRAM, kontroler przerwań. Moduł ten wyposażony jest w 16 MB pamięci DRAM (SDRAM), 12Mbps port USB, port szeregowy RS232. rozszerzony został o kartę przetworników A/C i C/A SERVO16. do pomiaru przebiegów szybkozmiennych Karta posiada to bitowych przetworników A/C 100 [kHz] Oraz to bitowych przetworników C/A, 100 [kHz].
, 12Mbps port USB, port szeregowy RS232. rozszerzony został o kartę przetworników A/C i C/A SERVO16. do pomiaru przebiegów szybkozmiennych. Karta posiada to bitowych przetworników A/C 100 [kHz] Oraz to bitowych przetworników C/A, 100 [kHz].")
44
Badania prototypowe: część pomiarowa
8 czuników wiroprądowych typu: XX Bentley

45
Dalsze prace Prace nad nowymi algorytmami stabilizacji AZM
Kontynuacja badań symulacyjnych, Implementacja wybranych algorytmów sterowania na stanowisku prototypowym

Podobne prezentacje