Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
GPS, GLONASS,GALILEO GPS, GLONASS,GALILEO W wykładzie wykorzystano materiały z wykładu dr hab. inż. Włodzimierz Salejdy,

3
GPS, GLONASS, GALILEO

4
GPS Dwa ważne pytania i problemy: 1.Gdzie znajduję się w danej chwili? 2.Jak dostać się z miejsca A do B? Wyznaczenie aktualnego położenia (pozycjonowanie) oraz nawigacja, to dwa odwieczne problemy, z którymi radzić sobie musieli dawniej wędrowcy, podróżnicy, żeglarze, a dziś kierowcy, marynarze, piloci, turyści, globtroterzy, wędrownicy.
 oraz nawigacja, to dwa odwieczne problemy, z którymi radzić sobie musieli dawniej wędrowcy, podróżnicy, żeglarze, a dziś kierowcy, marynarze, piloci, turyści, globtroterzy, wędrownicy..")
5
GPS Nawigacja to dział wiedzy żeglarskiej lub lotniczej obejmujący zespół wiado- mości i umiejętności potrzebnych do prowadzenia statków morskich lub po- wietrznych do określonego celu i określania na mapie ich położenia. NAWIGACJA LOTNICZA, proces, a także wiedza o procesie kierowania lotem statku powietrznego w przestrzeni, NAWIGACJA MORSKA, proces prowadzenia statku mor. bezpieczną i możliwie najszybszą trasą do punktu przeznaczenia, co wymaga umiejętności określania pozycji statku i wytyczania właściwego KURSU STATKU NAWIGACJA MORSKA, proces prowadzenia statku mor. bezpieczną i możliwie najszybszą trasą do punktu przeznaczenia, co wymaga umiejętności określania pozycji statku i wytyczania właściwego KURSU STATKU, GPS ang. Global Positioning System, NAVSTAR-GPS, globalny GPS ang. Global Positioning System, NAVSTAR-GPS, globalny system nawigacyjny, system radionawigacyjny o zasięgu świat, wykorzystujący sztuczne satelity

6
Satelitarny Układ Nawigacji Globalnej §Pierwszy GPS sfinansował i dziś kontroluje Departament Obrony USA. §GPS generuje i wysyła sygnały elektromagnetyczne, które przetwarzają odbiorniki GPS, co umożliwia użytkownikowi wyznaczyć swoje położenie, prędkość i czas. §Cztery GPS satelitarne sygnały są używane do wyznaczenia położenia w 3-wymiarowej przestrzeni oraz czasu (offset niedokładności czasu odbiornika). Nazwa ang. () Nazwa ang. Global Navigation Satellite System ( GNSS ) http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.htmlhttp://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html; http://www.trimble.com/gps/http://www.trimble.com/gps/ GPS — co to jest?
. Nazwa ang. () Nazwa ang. Global Navigation Satellite System ( GNSS ) GPS — co to jest .")
7
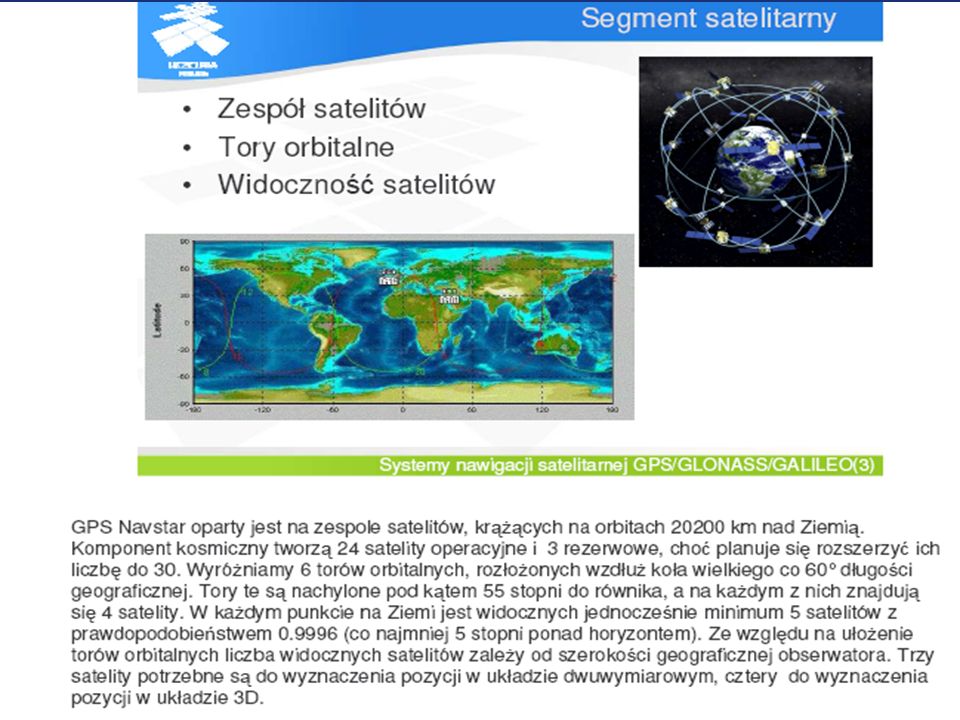
GPS Elementy strukturalne GPS 24 satelity orbitujące na wysokości 20 183 km w 6 różnych płaszczyznach nachylonych do płaszczyzny równika pod kątem 54 o o czasie obiegu Ziemi równym 11 h i 58 minut wyposażonych w dwa zegary atomowe mierzące czas z dokładnością 4 nanosekund(!) na dobę. System naziemnych stacji m.in. monitorujących funkcjonowanie i położenia satelitów, synchronizujących zegary atomowe, sterujących funkcjonowaniem GPS. Nawigacja odbywa się w układzie ziemskim (nieinercjalnym, obracającym się wraz z Ziemią); GPS używa układu poruszającego się razem z Ziemią po orbicie okołosłonecznej oraz układu gwiezdnego (nieruchomego, inercjalnego).
; GPS używa układu poruszającego się razem z Ziemią po orbicie okołosłonecznej oraz układu gwiezdnego (nieruchomego, inercjalnego)..")
8
Elementy składowe GPS — segment satelitarny Składa się z 24 satelitów (space vehicles SVs), które wysyłają sygnały w przestrzeń okołoziemską. Bywa, że segment ten zawiera więcej niż 24 satelitów, ponieważ niektóre z nich są zastępowane przez nowocześniejsze. Obecnie orbituje 29. Każdy satelita okrąża Ziemię w czasie 12 godzin (bez 2 sek.) na wysokości 20 183 km. Satelita pojawia się raz na 24 godziny nad tym samym punktem globu (4 mi- nuty wcześniej każdego dnia). Na GPS składa się 6 orbi- talnych płaszczyzn, po których krążą nominalnie 4 pojazdy; odległość kątowa między płaszczyznami wynosi 60 stopni. Płaszczyzny te są nachylone do płaszczyzny równika pod kątem 55 O. Taka konstelacja zapewnia użytkownikowi kontakt elektromagnetyczny z 5, 6, 7 lub 8 satelitami niezależnie od miejsca położenia na Ziemi.
 na wysokości km. Satelita pojawia się raz na 24 godziny nad tym samym punktem globu (4 mi- nuty wcześniej każdego dnia). Na GPS składa się 6 orbi- talnych płaszczyzn, po których krążą nominalnie 4 pojazdy; odległość kątowa między płaszczyznami wynosi 60 stopni. Płaszczyzny te są nachylone do płaszczyzny równika pod kątem 55 O. Taka konstelacja zapewnia użytkownikowi kontakt elektromagnetyczny z 5, 6, 7 lub 8 satelitami niezależnie od miejsca położenia na Ziemi..")
9
Elementy składowe GPS — segment satelitarny Płaszczyzny te są nachylone do płaszczyzny równika pod kątem 55 O. Taka konstelacja satelitów GPS zapewnia użytkownikowi kontakt elektromagnetyczny z 5, 6, 7 lub 8 satelitami niezależnie od miejsca położenia odbiornika na Ziemi. Na pokładzie każdego satelity znajdują się 4 zegary atomowe — 2 cezowe i 2 rubidowe. Mierzą czas z dokładnością do 4 nanosekund na dobę. Satelity emitują elektromagnetyczne sygnały, które wykorzystują odbiorniki naziemne do wyznaczania położenia na powierzchni Ziemi oraz czasu.

10
GPS Producent: Lockheed Martin USA; www.lockheedmartin.com/GPS/www.lockheedmartin.com/GPS/ GLONASS, satelita, Rosja

11
GPS Zdjęcia ze startu rakiety nośnej

12
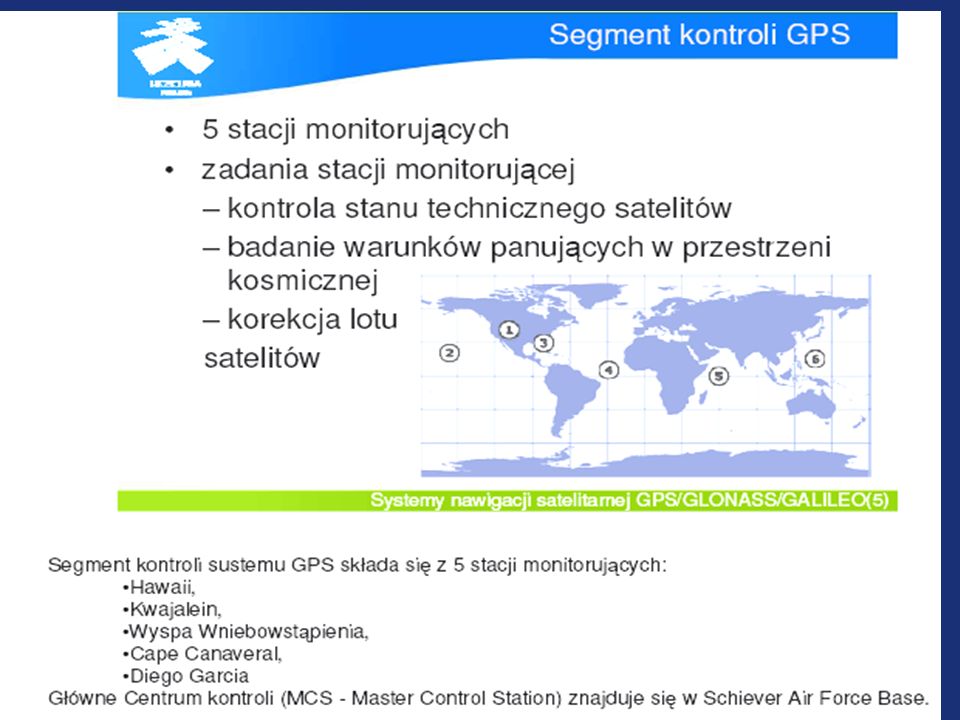
Segment kontroli, czyli stacje naziemne (1) Jest to rozmieszczony na kuli ziemskiej system naziemnych stacji monitorujących (sterujących i kontrolujących) funkcjonowanie satelitów (pod adresem GPS Master Control and Monitor Network znajduje się mapa tego segmentu). Jest to rozmieszczony na kuli ziemskiej system naziemnych stacji monitorujących (sterujących i kontrolujących) funkcjonowanie satelitów (pod adresem GPS Master Control and Monitor Network znajduje się mapa tego segmentu). Elementy segmentu naziemnego (1)GPS Master Control and Monitor NetworkGPS Master Control and Monitor Network 1. Główne naziemne centrum GPS znajduje się w bazie sił powietrznych w stanie Colorado USA (tzw. Master Control Station); wysyła i odbiera sygnały ze wszystkich satelitów. Komputery pokładowe satelitów wyznaczają położenia satelitów (efemerydy) oraz poprawki czasu dla zegarów pokładowych (time offset). Stacja naziemna wysyła dane dotyczące położenia satelity oraz czasu do każdego satelity. Satelity przesyłają, drogą radiową, te dane (swoje aktualne położenie i czas) do odbiorników naziemnych GPS Elementy składowe GPS http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html GPS Control Monitor
 funkcjonowanie satelitów (pod adresem GPS Master Control and Monitor Network znajduje się mapa tego segmentu). Elementy segmentu naziemnego (1)GPS Master Control and Monitor NetworkGPS Master Control and Monitor Network 1. Główne naziemne centrum GPS znajduje się w bazie sił powietrznych w stanie Colorado USA (tzw. Master Control Station); wysyła i odbiera sygnały ze wszystkich satelitów. Komputery pokładowe satelitów wyznaczają położenia satelitów (efemerydy) oraz poprawki czasu dla zegarów pokładowych (time offset). Stacja naziemna wysyła dane dotyczące położenia satelity oraz czasu do każdego satelity. Satelity przesyłają, drogą radiową, te dane (swoje aktualne położenie i czas) do odbiorników naziemnych GPS Elementy składowe GPS GPS Control Monitor.")
13
Elementy segmentu naziemnego (2) 2. Wspomagająca naziemna stacja kon- trolna (Backup Master Control Station) zlokalizowana w stanie Maryland. 3. Cztery naziemne anteny zapewniające: § stałą łączność pomiędzy centrum naziemnym a satelitami, § śledzenie trajektorii satelitów, § pomiary telemetryczne (zdalne). TELEMETRIATELEMETRIA dziedzina techniki (miernictwa i telekomunikacji) zajmująca się zdalnym mierzeniem wielkości fiz. i przekazywaniem (zwykle automatycznym) wyników tych pomiarów na odległość Elementy składowe GPS http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html GPS Control Monitor
 zlokalizowana w stanie Maryland. 3. Cztery naziemne anteny zapewniające: § stałą łączność pomiędzy centrum naziemnym a satelitami, § śledzenie trajektorii satelitów, § pomiary telemetryczne (zdalne). TELEMETRIATELEMETRIA dziedzina techniki (miernictwa i telekomunikacji) zajmująca się zdalnym mierzeniem wielkości fiz. i przekazywaniem (zwykle automatycznym) wyników tych pomiarów na odległość Elementy składowe GPS GPS Control Monitor.")
14
Elementy segmentu naziemnego (3) 4. Sześć stacji monitorujących rozmieszczonych w pobliżu równika Elementy składowe GPS http://www.enavigator.pl/

15
Segment użytkowników Składa się z odbiorników GPS i społeczności użytkowników. Odbiorniki GPS konwertują sygnały satelitarne na położenie, prędkość i czas. W celu wyznaczenia położenia (X,Y,Z) oraz czasu t są niezbędne sygnały pochodzące od 4 satelitów. Nawigacja to podstawowe zadanie GPS. Odbiorniki GPS wykorzystuje lotnictwo, statki, pojazdy naziemne oraz indywidualni użytkownicy. Dokładny czas (timing) jest wykorzystywany w obserwatoriach astronomicznych, telekomunikacji, w laboratoriach specjalistycznych (precyzyjne pomiary czasu i częstotliwości), do testowania teorii względności, monitorowania względnego ruchu fragmentów skorupy ziemskiej (kontynentów). Elementy składowe GPS
 oraz czasu t są niezbędne sygnały pochodzące od 4 satelitów. Nawigacja to podstawowe zadanie GPS. Odbiorniki GPS wykorzystuje lotnictwo, statki, pojazdy naziemne oraz indywidualni użytkownicy. Dokładny czas (timing) jest wykorzystywany w obserwatoriach astronomicznych, telekomunikacji, w laboratoriach specjalistycznych (precyzyjne pomiary czasu i częstotliwości), do testowania teorii względności, monitorowania względnego ruchu fragmentów skorupy ziemskiej (kontynentów). Elementy składowe GPS.")
16
Odbiorniki GPS

17
Niska dokładność Standardowa bezpłatna usługa pozycjonowania § 100 metrów w kierunku poziomym § 160 metrów w kierunku pionowym § 340 nanosekund Dokładność danych http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.htmlhttp://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html` Większa dokładność Autoryzowani użytkownicy z odpowiednim sprzętem § 10-20 metry w kierunku poziomym § 30 metrów w kierunku pionowym § 200 nanosekund

18
Naukowcy, laboratoria naukowe, sportowcy, farmerzy (USA), żołnierze, piloci, ratownicy, turyści, kierowcy samochodów dostawczych i transportowych, firmy transportowe (dyspozytorzy), systemy penitencjarne, żeglarze, drwale, strażacy, geografowie, geodeci i inni używają odbiorników GPS, co zwiększa ich produktywność, czyni życie bezpieczniejszym i łatwiejszym. Użytkownicy

19
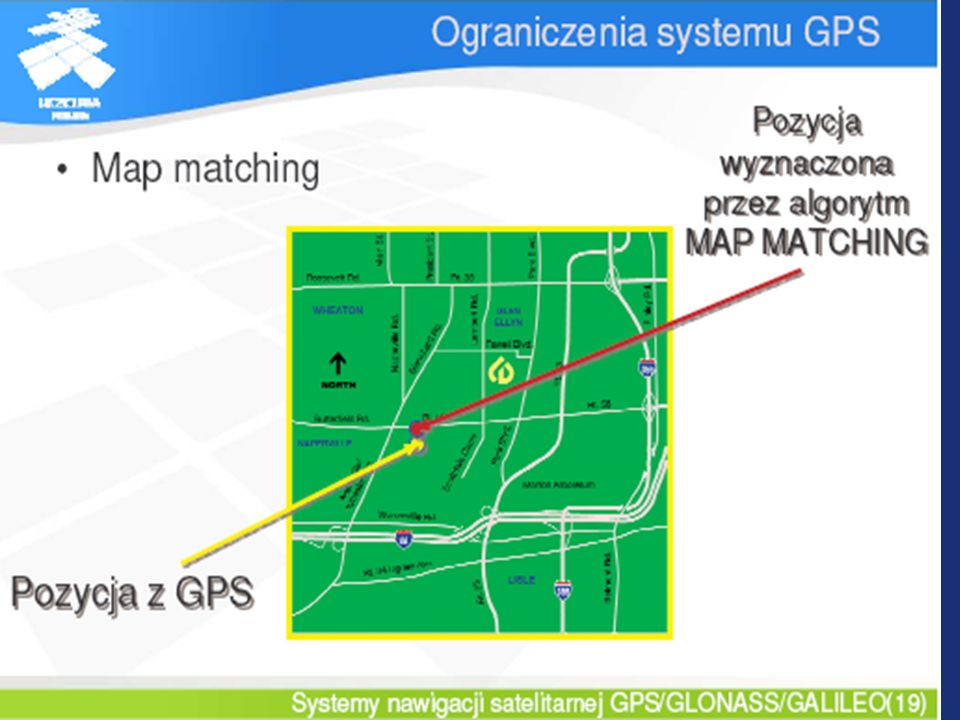
Jak działa GPS? 1.Odbiornik GPS wyznacza odległość od satelity ze wzoru: ODLEGŁOŚĆ (DROGA) = PRĘDKOŚĆ CZAS 2.GPS odmierza i mierzy bardzo dokładnie CZAS. 3.GPS monitoruje trajektorie satelitów oraz wysyła informacje o ich parametrach; znajomość dokładnego położenia satelitów w przestrzeni jest niezbędna. 4.Trilateracja satelitarna pozwala wyznaczyć położenie obiektu na powierzchni Ziemi lub w jej przestrzeni okołoziemskiej 5.Wprowadzenie poprawek wynikających z położenia satelity oraz drogi przebywanej przez sygnał elektromagnetyczny w warstwach atmosfery
 = PRĘDKOŚĆ CZAS 2.GPS odmierza i mierzy bardzo dokładnie CZAS. 3.GPS monitoruje trajektorie satelitów oraz wysyła informacje o ich parametrach; znajomość dokładnego położenia satelitów w przestrzeni jest niezbędna. 4.Trilateracja satelitarna pozwala wyznaczyć położenie obiektu na powierzchni Ziemi lub w jej przestrzeni okołoziemskiej 5.Wprowadzenie poprawek wynikających z położenia satelity oraz drogi przebywanej przez sygnał elektromagnetyczny w warstwach atmosfery.")
20
Triangulacja TRIANGULACJATRIANGULACJA [łac.], metoda wyznaczania współrzędnych punktów geodezyjnych w terenie za pomocą układu trójkątów tworzących tzw. sieć triangulacyjną geodezyjnych
![Triangulacja TRIANGULACJATRIANGULACJA [łac.], metoda wyznaczania współrzędnych punktów geodezyjnych w terenie za pomocą układu trójkątów tworzących tzw.](http://images.slideplayer.pl/37/10730630/slides/slide_20.jpg "sieć triangulacyjną geodezyjnych.")
21
Triangulacja TRIANGULACJA [łac.], metoda wyznaczania współrzędnych punktów geodezyjnych w terenie za pomocą układu trójkątów tworzących tzw. sieć triangulacyjną, w której wierzchołkami trójkątów są mierzone punkty. Początkiem pracy jest precyzyjny pomiar odcinka tzw. bazy triangulacyjnej o długości ok. 2–3 km. Następnie mierzy się kąty między bokami sieci i rozwiązuje się trójkąty, tzn. oblicza długości boków; ponadto metodami astr. wyznacza się współrzędne geogr. wybranych punktów sieci (tzw. punkty Laplace'a) i azymuty niektórych boków. Na tej podstawie oblicza się współrzędne geogr. i geod. pozostałych punktów. geodezyjnych
![Triangulacja TRIANGULACJA [łac.], metoda wyznaczania współrzędnych punktów geodezyjnych w terenie za pomocą układu trójkątów tworzących tzw.](http://images.slideplayer.pl/37/10730630/slides/slide_21.jpg "sieć triangulacyjną, w której wierzchołkami trójkątów są mierzone punkty. Początkiem pracy jest precyzyjny pomiar odcinka tzw. bazy triangulacyjnej o długości ok. 2–3 km. Następnie mierzy się kąty między bokami sieci i rozwiązuje się trójkąty, tzn. oblicza długości boków; ponadto metodami astr. wyznacza się współrzędne geogr. wybranych punktów sieci (tzw. punkty Laplace a) i azymuty niektórych boków. Na tej podstawie oblicza się współrzędne geogr. i geod. pozostałych punktów. geodezyjnych.")
22
Trilateracja TRILATERACJA [łac.], metoda wyznaczania na powierzchni Ziemi współrzędnych punktów geodezyjnych za pomocą układu trójkątów, w których mierzy się wszystkie boki (np. za pomocą dalmierza laserowego); t. uzupełnia tradycyjną triangulację. geodezyjnychtriangulację
![Trilateracja TRILATERACJA [łac.], metoda wyznaczania na powierzchni Ziemi współrzędnych punktów geodezyjnych za pomocą układu trójkątów, w których mierzy się wszystkie boki (np.](http://images.slideplayer.pl/37/10730630/slides/slide_22.jpg "za pomocą dalmierza laserowego); t. uzupełnia tradycyjną triangulację. geodezyjnychtriangulację.")
23
Trilateracja GEODEZYJNY PUNKT, utrwalony na powierzchni Ziemi (za pomocą kamiennych tablic, słupów, wież triangulacyjnych) punkt o znanych współrzędnych, wyznaczonych względem przyjętego układu; rozróżnia się p.g. astronomiczno- geodezyjne (Laplace'a punkt), triangulacyjne (triangulacja), grawimetryczne (grawimetria), wysokościowe, tzw. repery (niwelacja), poligonowe i fotopunkty (fotogrametria).Laplace'a punkttriangulacjagrawimetrianiwelacjafotogrametria
, triangulacyjne (triangulacja), grawimetryczne (grawimetria), wysokościowe, tzw. repery (niwelacja), poligonowe i fotopunkty (fotogrametria).Laplace a punkttriangulacjagrawimetrianiwelacjafotogrametria.")
24
Tri(Cztero)lateracja w GPS GPS używa satelitów krążących po orbitach jako układu odniesienia, w którym wyznacza położenie danego obiektu. Załóżmy, że znamy położenie r 1 satelity i odległość d 1 obiektu od pierwszego satelity. Gdzie znajduje się z całą pewnością nasz obiekt? Geometria podpowiada: Gdzieś na sferze S 1 o: 1.Środku w punkcie r 1 chwilowego położenia satelity pierwszego. 2.Promieniu d 1.

25
Tri(Cztero)lateracja w GPS Załóżmy, że znamy położenie r 2 i odległość d 2 do drugiego satelity. Gdzie znajduje się z całą pewnością nasz obiekt? Geometria podpowiada: Gdzieś na sferze S 2 o: 1.Środku w punkcie r 2 chwilowego położenia drugiego satelity. 2.Promieniu d 2. Odpowiedź dokładniejsza: Na okręgu O 1,2, który wyznaczają punkty przecięcia się sfer S 1 i S 2.

26
Tri(Cztero)lateracja w GPS Załóżmy, że znamy położenie r 3 i odległość d 3 do trzeciego satelity. Gdzie znajduje się z całą pewnością nasz obiekt? Geometria podpowiada: Gdzieś na sferze S 3 o: 1.Środku w punkcie r 3 chwilowego położenia trzeciego satelity. 2.Promieniu d 3. Odpowiedź precyzyjniejsza: W jednym z punktów r 3,1 lub r 3,2, w których sfera S 3 przecina okrąg O 1,2.

27
Tri(Cztero)lateracja w GPS Załóżmy, że znamy położenie r 4 i odległość d 4 do czwartego satelity. Gdzie znajduje się z całą pewnością nasz obiekt? Geometria podpowiada: Gdzieś na sferze S 4 o: 1.Środku w punkcie r 4 chwilowego położenia czwartego satelity. 2.Promieniu d 4. Odpowiedź dokładna/precyzyjna: W jednym punkcie, w którym cztery sfery S 1, S 2, S 3 i S 4 przecinają się!

28
Tri(Cztero)lateracja w GPS. Jak wyznaczana jest odległość do satelity? Wyznaczanie odległości d 1, d 2, d 3 i d 4. d i = c t i, gdzie i = 1, 2, 3, 4. Czynnikami decydującymi o dokładności d 1, d 2, d 3 i d 4 są: 1.Pomiary czasów t 1, t 2, t 3 i t 4. 2.Znajomość prędkości rozchodzenia się fal elektromagnetycznych w atmosferze ziemskiej.

29
Tri(Cztero)lateracja w GPS
lateracja w GPS")
30
Podsumowanie 1.Położenie obiektu jest wyznaczane na podstawie znajomości jego odległości od satelitów. 2.Konieczna jest dokładna znajomość położenia 4 satelitów.

31
Jak pozycjonuje GPS? Położenie odbiornika znajduje się w miejscu, w którym przecinają się 4 sfery o środkach w miejscu chwilowego położenia satelitów(Intersection of Range Spheres) Intersection of Range SpheresIntersection of Range Spheres §Satelita wysyła sygnały do odbiornika. Na ich podstawie odbiornik określa położenie satelitów w chwili wysłania sygnału. §Co najmniej 4 satelity są potrzebne do określenia położenia odbiornika i czasu. Współrzędne położenia są określane w różnych układach odniesienia (Earth-Centered, Earth-Fixed X, Y, Z (ECEF XYZ) coordinates; ECEF X, Y, and Z ECEF X, Y, and Z ECEF X, Y, and Z §Czas jest potrzebny do skorygowania czasu zegarów odbiornika, których dokładność jest niska (dlatego odbiorniki są względnie tanie) GPS SV and Receiver XYZ GPS SV and Receiver XYZ GPS SV and Receiver XYZ
 Intersection of Range SpheresIntersection of Range Spheres §Satelita wysyła sygnały do odbiornika. Na ich podstawie odbiornik określa położenie satelitów w chwili wysłania sygnału. §Co najmniej 4 satelity są potrzebne do określenia położenia odbiornika i czasu. Współrzędne położenia są określane w różnych układach odniesienia (Earth-Centered, Earth-Fixed X, Y, Z (ECEF XYZ) coordinates; ECEF X, Y, and Z ECEF X, Y, and Z ECEF X, Y, and Z §Czas jest potrzebny do skorygowania czasu zegarów odbiornika, których dokładność jest niska (dlatego odbiorniki są względnie tanie) GPS SV and Receiver XYZ GPS SV and Receiver XYZ GPS SV and Receiver XYZ.")
32
Korekty Kwestią najważniejszą jest dokładny pomiar czasu. GPS wyznacza czas potrzebny na przebycie drogi od satelitów do odbiornika uwzględniając: §małą dokładność zegara odbiornika; §różne prędkości rozchodzenia się fal elektromagnetycznych w warstwach atmosfery, §efekty relatywistyczne

33
Co jeszcze mierzy GPS? System wyznacza prędkość odbiornika: System wyznacza prędkość odbiornika: § na podstawie zmiany jego położenia lub § z wykorzystaniem efektu Dopplera — zmiana częstości fali elektromagnetycznej wywołana ruchem obiektu. Każdy satelita jest wyposażony w 4 zegary atomowe: dwa cezowe i dwa rubidowe. Praca pokładowych zegarów atomowych jest monitorowana przez naziemne stacje.

34
Jak GPS wyznacza położenie? (1) Fizyczna zasada działania GPS Wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) gdzie i = 1, 2, 3, 4, t i oraz r i są czasem i położeniem i-tego satelity. Satelity przekazują do obiektu naziemnego położenia r i oraz czasy t i wysłania sygnału. Odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(T Z -t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę. Położenie (T Z,R Z ) wyznacza odbiornik GPS rozwiązując układ 4 powyższych równań względem 4 niewiadowych, tj. (T Z,R Z ), gdzie R Z jest wektorem.
 Fizyczna zasada działania GPS Wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) gdzie i = 1, 2, 3, 4, t i oraz r i są czasem i położeniem i-tego satelity. Satelity przekazują do obiektu naziemnego położenia r i oraz czasy t i wysłania sygnału. Odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(T Z -t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę. Położenie (T Z,R Z ) wyznacza odbiornik GPS rozwiązując układ 4 powyższych równań względem 4 niewiadowych, tj. (T Z,R Z ), gdzie R Z jest wektorem..")
35
Jak GPS wyznacza położenie? (2) Algorytm matematyczny wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) na podstawie 4 sygnałów emitowanych z pokładów 4 satelitów GPS. Załóżmy, że obiekt o współrzędnych (T Z,R Z ) odbiera jednocześnie 4 sygnały wyemitowanych przez 4 satelity znajdujące się w położeniach: r 1, r 2, r 3, r 4 w chwilach czasu odpowiednio t 1, t 2, t 3 i t 4. Wtedy szukane położenie (T Z,R Z ) znajdujemy rozwiązując jednocześnie układ czterech równań | R Z — r i | 2 = c 2 (T Z — t i ) 2 dla i=1,2,3,4. Sygnały wysyłane przez satelity przekazują do obiektu naziemnego: położenie r i i-tego satelity, czas wysłania sygnału t i ; odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(T-t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę.
 Algorytm matematyczny wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) na podstawie 4 sygnałów emitowanych z pokładów 4 satelitów GPS. Załóżmy, że obiekt o współrzędnych (T Z,R Z ) odbiera jednocześnie 4 sygnały wyemitowanych przez 4 satelity znajdujące się w położeniach: r 1, r 2, r 3, r 4 w chwilach czasu odpowiednio t 1, t 2, t 3 i t 4. Wtedy szukane położenie (T Z,R Z ) znajdujemy rozwiązując jednocześnie układ czterech równań | R Z — r i | 2 = c 2 (T Z — t i ) 2 dla i=1,2,3,4. Sygnały wysyłane przez satelity przekazują do obiektu naziemnego: położenie r i i-tego satelity, czas wysłania sygnału t i ; odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(T-t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę..")
36
Jak GPS wyznacza położenie? (3) Trilateracja
 Trilateracja")
37
Korekta błędów Korekta wyznaczonych wartości odległości uwzględnia realia 1.Prędkość fal elektromagnetycznych jest stała w ośrodku jednorodnym (np. w próżni). Fale elektromagnetyczny z satelity docierają do odbiornika GPS poprzez przestrzeń okołoziemską przechodząc po drodze przez jonosferę (obszar zjonizowanych cząsteczek gazu) oraz przez troposferę, w której zawarta jest para wodna. Powoduje to niepewności w „pomiarze” odległości. JONOSFERAJONOSFERA [gr.], warstwa atmosfery ziemskiej odznaczająca się obecnością znacznej liczby swobodnych elektronów i jonów, powstałych w wyniku jonizacji atomów i cząsteczek zawartych w powietrzu.
. Fale elektromagnetyczny z satelity docierają do odbiornika GPS poprzez przestrzeń okołoziemską przechodząc po drodze przez jonosferę (obszar zjonizowanych cząsteczek gazu) oraz przez troposferę, w której zawarta jest para wodna. Powoduje to niepewności w „pomiarze odległości. JONOSFERAJONOSFERA [gr.], warstwa atmosfery ziemskiej odznaczająca się obecnością znacznej liczby swobodnych elektronów i jonów, powstałych w wyniku jonizacji atomów i cząsteczek zawartych w powietrzu..")
38
Korekta błędów — jonosfera JONOSFERA [gr.], warstwa atmosfery ziemskiej odznaczająca się obecnością znacznej liczby swobodnych elektronów i jonów, powstałych w wyniku jonizacji atomów i cząsteczek zawartych w powietrzu. Jonizacja zachodzi gł. pod wpływem promieniowania słonecznego (nadfioletowego i rentgenowskiego), a także promieniowania kosm. i meteorów. Jonosfera rozciąga się od wys. 50–60 km do wys. 800 km nad powierzchnią Ziemi.promieniowania kosm.
![Korekta błędów — jonosfera JONOSFERA [gr.], warstwa atmosfery ziemskiej odznaczająca się obecnością znacznej liczby swobodnych elektronów i jonów, powstałych w wyniku jonizacji atomów i cząsteczek zawartych w powietrzu.](http://images.slideplayer.pl/37/10730630/slides/slide_38.jpg "Jonizacja zachodzi gł. pod wpływem promieniowania słonecznego (nadfioletowego i rentgenowskiego), a także promieniowania kosm. i meteorów. Jonosfera rozciąga się od wys. 50–60 km do wys. 800 km nad powierzchnią Ziemi.promieniowania kosm..")
39
Korekta błędów — troposfera Korekta wyznaczonych wartości odległości uwzględnia realia 2.Fale elektromagnetyczne docierają z satelitów do odbiornika GPS poprzez przestrzeń okołoziemską przechodząc po drodze przez troposferę, co powoduje określone niepewności w „pomiarze” odległości. TROPOSFERATROPOSFERA [gr.], warstwa atmosfery ziemskiej rozciągająca się od powierzchni Ziemi do wys. 16–18 km nad równikiem, 10–12 km nad umiarkowanymi szer. geogr. i 7–10 km nad obszarami podbiegunowymi

40
Korekta błędów — jonosfera TROPOSFERA [gr.], warstwa atmosfery ziemskiej rozciągająca się od powierzchni Ziemi do wys. 16–18 km nad równikiem, 10–12 km nad umiarkowanymi szer. geogr. i 7–10 km nad obszarami podbiegunowymi; w warstwie tej temperatura maleje jednostajnie ze wzrostem wysokości i na górnej granicy t. osiąga wartość od -55°C (nad obszarami podbiegunowymi) do -80°C (nad obszarami równikowymi); t. zawiera ponad 99% znajdującej się w atmosferze pary wodnej, toteż wszystkie procesy związane z kondensacją pary wodnej zachodzą niemal wyłącznie w tej warstwie; w t. jest także skupiona przeważająca część masy powietrza atmosf.; procesy zachodzące w t. mają decydujący wpływ na pogodę i klimat, jest ona zatem gł. przedmiotem badań meteorologii.pogodęmeteorologii
![Korekta błędów — jonosfera TROPOSFERA [gr.], warstwa atmosfery ziemskiej rozciągająca się od powierzchni Ziemi do wys.](http://images.slideplayer.pl/37/10730630/slides/slide_40.jpg "16–18 km nad równikiem, 10–12 km nad umiarkowanymi szer. geogr. i 7–10 km nad obszarami podbiegunowymi; w warstwie tej temperatura maleje jednostajnie ze wzrostem wysokości i na górnej granicy t. osiąga wartość od -55°C (nad obszarami podbiegunowymi) do -80°C (nad obszarami równikowymi); t. zawiera ponad 99% znajdującej się w atmosferze pary wodnej, toteż wszystkie procesy związane z kondensacją pary wodnej zachodzą niemal wyłącznie w tej warstwie; w t. jest także skupiona przeważająca część masy powietrza atmosf.; procesy zachodzące w t. mają decydujący wpływ na pogodę i klimat, jest ona zatem gł. przedmiotem badań meteorologii.pogodęmeteorologii.")
41
Korekta błędów Niepewności dotyczące prędkości fal elektromagnetycznych są modelowane i na podstawie przyjętych modeli jonosfery oraz troposfery są wyznaczane stosowne poprawki/korekty odległości d 1, d 2, d 3 i d 4 dzielących obiekt od 4 lub więcej satelitów.

42
Czas i historia sztuki Co to jest czas? Odpowiedź wybitnego malarza XX wieku w jego obrazach

43
Czas — wizje malarskie Salvatore Dali (1) Salvatore Dali The Persistence of Memory, 1931 Trwałość pamięci
 Salvatore Dali The Persistence of Memory, 1931 Trwałość pamięci")
44
GPS Wariacje malarskie S. Dali na temat czasu i pami ę ci

45
GPS One Second Before Awakening from a Dream Caused by the Flight of a Bee Around a Pomegranate, 1944 Jedna sekunda przed wybudzeniem spowodowanym lotem pszczoły wokół drzewa granatu, 1944, Salvatore Dali Jedna sekunda według S. Dali

46
Czas i teoria względności Co to jest czas? Odpowiedzi fizyków. Podstawowa wielkość fizyczna Czwarta współrzędna 4-ro wymiarowej czaso- przestrzeni (płaski 4-ro wymiarowy Wszechświat) — rewolucyjna idea A. Einsteina Definicja encyklopedyczna: CZAS, fiz. wielkość służąca do chronologicznego uszeregowania zdarzeń.CZAS,
 — rewolucyjna idea A. Einsteina Definicja encyklopedyczna: CZAS, fiz. wielkość służąca do chronologicznego uszeregowania zdarzeń.CZAS,.")
47
Czas — ujęcie encyklopedyczne (1) Koncepcja klasyczna — wg. I. Newtona czas jest wielkością bezwzględną, absolutną (stąd tzw. czas absolutny), niezależną od przestrzeni i jakichkolwiek czynników fizycznych (upływa jednakowo we wszystkich układach odniesienia). W teorii względności A. Einsteina czas i przestrzeń są traktowane równoprawnie, tworząc czterowymiarowe continuum — czasoprzestrzeń (czas jest czwartą współrzędną obok współrzędnych przestrzennych). W myśl tej teorii pojęcie jednoczesności zdarzeń zależy od układu odniesienia (czas własny, dylatacja czasu), a czas nie ma charakteru absolutnego.względnościczas własnydylatacja czasu
, niezależną od przestrzeni i jakichkolwiek czynników fizycznych (upływa jednakowo we wszystkich układach odniesienia). W teorii względności A. Einsteina czas i przestrzeń są traktowane równoprawnie, tworząc czterowymiarowe continuum — czasoprzestrzeń (czas jest czwartą współrzędną obok współrzędnych przestrzennych). W myśl tej teorii pojęcie jednoczesności zdarzeń zależy od układu odniesienia (czas własny, dylatacja czasu), a czas nie ma charakteru absolutnego.względnościczas własnydylatacja czasu.")
48
Czas — ujęcie encyklopedyczne (2) Ogólna teoria względności opisuje związek czasoprzestrzeni z polem grawitacyjnym i rozkładem materii; zgodnie z tą teorią czas jest zależny od rozkładu materii; niezmienniczy, niezależny od wyboru układu odniesienia charakter mają nie odstępy czasu i odległości przestrzenne, ale odległości między zdarzeniami w czasoprzestrzeni.
 Ogólna teoria względności opisuje związek czasoprzestrzeni z polem grawitacyjnym i rozkładem materii; zgodnie z tą teorią czas jest zależny od rozkładu materii; niezmienniczy, niezależny od wyboru układu odniesienia charakter mają nie odstępy czasu i odległości przestrzenne, ale odległości między zdarzeniami w czasoprzestrzeni.")
49
Teoria względności i GPS (1) GPS odmierza czas z dokładnością 410 -9 sekundy na dobę. Co to praktycznie oznacza? Doba ma 24 3600 10 9 = 8,64 10 13 10 14 nanosekund. Niepewność względna pomiaru wynosi Oznacza to pomiar wielkości 10 14 z dokładnością do 5. Niepewność względna wyrażona w procentach wynosi (5 10 -12 )%
%.")
50
Teoria względności i GPS (2) GPS odmierza czas z dokładnością 410 -9 sekundy na dobę! Co to praktycznie oznacza? Po upływie jednej doby zegary atomowe na pokładach satelitów muszą być korygowane z dokładnością do 4 nanosekund! Efekty przewidziane szczególną i ogólną teorią względności są rzędu setek i tysięcy nanosekund! Nie uwzględnienie tych efektów uczyniłoby GPS bezużytecznym!

51
Teoria względności i GPS (3) Efekty 1.Pole grawitacyjne wpływa na tempo upływu czasu — zegary atomowe spóźniają lub spieszą się w zależności od ich odległości od źródła pola grawitacyjnego znajdującego się w środku Ziemi; praktycznie oznacza to istnienie efektu zwanego przesunięciem ku fioletowi częstości fal elektromagnetycznych emitowanych z satelity w kierunku powierzchni Ziemi (zegary na powierzchni Ziemi idą wolniej od satelitarnych; im bliżej centrum pola grawitacyjnego, tym wolniejszy upływ czasu); jest to efekt wynikający z przestrzennego położenia zegarów ziemskich i satelitarnych w polu grawitacyjnym
 Efekty 1.Pole grawitacyjne wpływa na tempo upływu czasu — zegary atomowe spóźniają lub spieszą się w zależności od ich odległości od źródła pola grawitacyjnego znajdującego się w środku Ziemi; praktycznie oznacza to istnienie efektu zwanego przesunięciem ku fioletowi częstości fal elektromagnetycznych emitowanych z satelity w kierunku powierzchni Ziemi (zegary na powierzchni Ziemi idą wolniej od satelitarnych; im bliżej centrum pola grawitacyjnego, tym wolniejszy upływ czasu); jest to efekt wynikający z przestrzennego położenia zegarów ziemskich i satelitarnych w polu grawitacyjnym")
52
Teoria względności i GPS (4) Efekty 2. Dylatacja czasu — zegary atomowe orbitalne i ziemskie są w ruchu względnym, co powoduje przesunięcie dopplerowskie częstości (zmianę częstości; tempo upływu czasu na zegarach ruchomych jest wolniejsze; zegary będące w ruchu spóźniają się względem zegarów spoczywających). 3. Efekt Sagnac’a — dobowy ruch obrotowy Ziemi oraz ruch orbitalny satelitów; wnosi błędy pomiaru czasu rzędu 200 nanoseknd na dobę. 4. Efekt grawitomagnetyczny — dobowy obrót pola magnetycznego Ziemi, wpływa na tempo upływu czasu; poprawki są rzędu pikosekund na dobę, są do zaniedbania.
. 3. Efekt Sagnac’a — dobowy ruch obrotowy Ziemi oraz ruch orbitalny satelitów; wnosi błędy pomiaru czasu rzędu 200 nanoseknd na dobę. 4. Efekt grawitomagnetyczny — dobowy obrót pola magnetycznego Ziemi, wpływa na tempo upływu czasu; poprawki są rzędu pikosekund na dobę, są do zaniedbania..")
53
Teoria względności i GPS (5) Efekty — zajmiemy się dalej oszacowaniem wpływu dwóch pierwszych (stacjonarnego pola grawitacyjnego oraz dylatacji czasu) na funkcjonowanie GPS, tj. pomiar czasu

54
Teoria względności i GPS (5) Metryka Schwarzschilda gdzie jest potencjałem Newtona, t czasem mierzonym w inercjalnym układzie odniesienia umieszczonym w nieskończoności, prędkością styczną obiektu na orbicie kołowej; ds to przedział czasoprzestrzenny.
 Metryka Schwarzschilda gdzie jest potencjałem Newtona, t czasem mierzonym w inercjalnym układzie odniesienia umieszczonym w nieskończoności, prędkością styczną obiektu na orbicie kołowej; ds to przedział czasoprzestrzenny.")
55
Teoria względności i GPS (6) Zastosujemy metrykę Schwarzschilda dwukrotnie, tj. do zegara na powierzchni Ziemi i na orbicie; z otrzymanych wyrażeń tworzymy iloraz gdzie Z ( S ) to czas mierzony na Ziemi (satelicie), M Z —masa Ziemi, R Z (R S ) — promienie trajektorii kołowych zegara na powierzchni Ziemi (na orbicie); dokładność ilorazu i tym samym GPS jest rzędu O(c -2 )
 to czas mierzony na Ziemi (satelicie), M Z —masa Ziemi, R Z (R S ) — promienie trajektorii kołowych zegara na powierzchni Ziemi (na orbicie); dokładność ilorazu i tym samym GPS jest rzędu O(c -2 ).")
56
Teoria względności i GPS (7) Jakiego rzędu są efekty relatywistyczne? Przesunięcie grawitacyjne częstości w stronę fioletu Zaniedbujemy ruch zegarów ziemskich i satelitarnych R S =26 561 km; (1-x) 1/2 1-x/2; d Z =GM Z /(R Z c 2 ) =10 -10 i d S =GM Z /(R S c 2 )=1,6710 -10,otrzymujemy gdzie D=(d Z — d S )/2>0. Oznacza to, że stosunek częstości zegara na orbicie i na Ziemi wynosi f S /f Z =1 — D<1. Przesunięcie ku fioletowi!
 1/2 1-x/2; d Z =GM Z /(R Z c 2 ) = i d S =GM Z /(R S c 2 )=1, ,otrzymujemy gdzie D=(d Z — d S )/2>0. Oznacza to, że stosunek częstości zegara na orbicie i na Ziemi wynosi f S /f Z =1 — D<1. Przesunięcie ku fioletowi!.")
57
Teoria względności i GPS (8) Jakiego rzędu są efekty relatywistyczne? Przesunięcie ku fioletowi oznacza, że zegar na orbicie spieszy się względem ziemnego (zegary na orbicie idą szybciej), bo f S /f Z =1 — D<1. W ciągu doby różnica we wskazaniach zegarów osiąga t= 45 700 ns =45,7 mikrosekund. W tym czasie światło przebywa odległość l = 13 710 m 14 km.
, bo f S /f Z =1 — D<1. W ciągu doby różnica we wskazaniach zegarów osiąga t= ns =45,7 mikrosekund. W tym czasie światło przebywa odległość l = m 14 km..")
58
Teoria względności i GPS (9) Jakiego rzędu są efekty relatywistyczne? Przesunięcie kinematyczne częstości w stronę czerwieni. Uwzględniamy ruch zegarów ziemskich i satelitarnych v S =3 874 m/s, v Z =465 m/s; (1-x) 1/2 1-x/2 gdzie B>0. Oznacza to, że stosunek częstości zegara na orbicie i na Ziemi wynosi f S /f Z =1 + B>1. Przesunięcie ku czerwieni! Zegary atomowe na orbicie spóźniają się!
 1/2 1-x/2 gdzie B>0. Oznacza to, że stosunek częstości zegara na orbicie i na Ziemi wynosi f S /f Z =1 + B>1. Przesunięcie ku czerwieni. Zegary atomowe na orbicie spóźniają się!.")
59
Teoria względności i GPS (10) Jakiego rzędu są efekty relatywistyczne? Przesunięcie ku czerwieni powoduje, że zegar na orbicie spóźnia się względem ziemskiego (idzie wolniej), bo f S /f Z =1 + B>1. W ciągu doby różnica we wskazaniach zegarów osiąga t= 7 100 ns =7,1 mikrosekundy. W tym czasie światło przebywa odległość l = 2 130 m 2 km.
, bo f S /f Z =1 + B>1. W ciągu doby różnica we wskazaniach zegarów osiąga t= ns =7,1 mikrosekundy. W tym czasie światło przebywa odległość l = m 2 km..")
60
Teoria względności i GPS (11) Jakiego rzędu są wspomniane 2 efekty relatywistyczne? Wypadkowa różnica czasu na zegarze ziemskich i satelitarnym ( efekt przesunięcia częstości ku fioletowi i czerwieni) jest rzędu t= 39 000 ns =39 mikrosekund. W rezultacie zegar atomowy na orbicie spieszy się względem ziemnego (idzie szybciej) o 39 mikrosekund na dobę. W tym czasie światło przebywa odległość l = 11 700 m 12 km.
 jest rzędu t= ns =39 mikrosekund. W rezultacie zegar atomowy na orbicie spieszy się względem ziemnego (idzie szybciej) o 39 mikrosekund na dobę. W tym czasie światło przebywa odległość l = m 12 km..")
61
Teoria względności i GPS W celu zwiększenia dokładności pomiaru czasu (oprócz przesunięcia częstości ku fioletowi i czerwieni) i zwiększenia dokładności pozycjonowania GPS, używa się bardziej zaawansowanych metryk przestrzeni okołoziemskiej uwzględniających: efekt Sagnaca, rzeczywisty kształt Ziemi, która nie jest idealną kulą, dynamikę pola grawitacyjnego i magnetycznego Ziemi wynikającego z jej ruchu obrotowego względem osi północ-południe.
 i zwiększenia dokładności pozycjonowania GPS, używa się bardziej zaawansowanych metryk przestrzeni okołoziemskiej uwzględniających: efekt Sagnaca, rzeczywisty kształt Ziemi, która nie jest idealną kulą, dynamikę pola grawitacyjnego i magnetycznego Ziemi wynikającego z jej ruchu obrotowego względem osi północ-południe.")
62
Teoria względności efekt Sagnac’a Teoria względności — efekt Sagnac’a Jeśli dwa impulsy światła są wysłane w przeciwnych kierunkach wokół nieruchomej kołowej pętli o promieniu R, to będą one poruszały się po tej samej drodze, którą przebędą w tym samym czasie (patrz rysunek po lewej stronie). Prawa strona rysunku ilustruje sytuację, gdy pętla wiruje; symbol oznacza drogę kątową pętli w czasie ruchu impulsów światła. Dla dodatnich wartości , impuls biegnący zgodnie z kierunkiem obrotu przebywa nieco dłuższą drogę, w wyniku czego osiąga koniec pętli nieco później. http://www.mathpages.com/rr/s2-07/2-07.htm

63
Interpretacja ilościowa: niech oznacza prędkość kątową, wtedy prędkość styczna końców pętli jest równa v = R, a wypadkowe prędkości impulsów są c-v i c+v. Oba impulsy rozpoczynają bieg po drodze 2 R (w układzie związanym z osią obrotu). Tak więc różnica czasów przebiegu obu impulsów wynosi Teoria względności efekt Sagnac’a Teoria względności — efekt Sagnac’a gdzie A = R 2 jest powierzchnią pętli. Ta analiza jest poprawna w sensie klasycznym oraz relatywistycznym
. Tak więc różnica czasów przebiegu obu impulsów wynosi Teoria względności efekt Sagnac’a Teoria względności — efekt Sagnac’a gdzie A = R 2 jest powierzchnią pętli. Ta analiza jest poprawna w sensie klasycznym oraz relatywistycznym.")
64
Teoria względności i GPS Jakiego rzędu są wyniki końcowe podejścia uwzględniającego wymienione efekty? Wypadkowa różnica czasu na zegarze ziemskich i satelitarnym jest rzędu t= 38 580 ns =38,58 mikrosekund. Oznacza to, że zegar atomowy satelity spieszy się względem ziemnego (idzie szybciej) o 38,58 mikrosekund na dobę. W tym czasie światło przebywa odległość l = 11 578 m. Jak rozwiązano technicznie ten problem w GPS? Nominalna częstotliwość pracy systemu wynosi 10,23 MHz. Zmniejszono więc częstotliwość pracy satelitów do wartości
 o 38,58 mikrosekund na dobę. W tym czasie światło przebywa odległość l = m. Jak rozwiązano technicznie ten problem w GPS. Nominalna częstotliwość pracy systemu wynosi 10,23 MHz. Zmniejszono więc częstotliwość pracy satelitów do wartości.")
65
różnicowy GPS Rozwój GPSu — różnicowy GPS W celu zwiększenia dokładności pozycjonowania przez GPS wzbogacono go o tzw. różnicowy GPS (Differential GPS) oraz system referencyjnych stacji naziemnych, co umożliwia określenie położenia z dokładnością rzędu metrów!
 oraz system referencyjnych stacji naziemnych, co umożliwia określenie położenia z dokładnością rzędu metrów!.")
66
Teoria względności i GPS GPS funkcjonuje m.in. wyłącznie i dzięki temu, że superdokładne pomiary czasu na odległych i ruchomych zegarach atomowych są w trybie ciągłym korygowane z uwzględnieniem przewidywań teorii względności Alberta Einsteina! GPS

67
Latający Holender to nazwa kapitana legendarnego statku- widmo, błądzącego po oceanach od bieguna do bieguna. Zobaczenie tego statku, zwanego także „Latającym Holendrem”, przynosi nieszczęście, a nawet śmierć. Kapitan, któremu cyklon nie pozwalał opłynąć Przylądka Burz, klął się na piekło, że go opłynie, choćby mu to miało zająć całą wieczność. Diabeł niestety chwycił go za słowo i skazał na wieczną tułaczkę po morzach, bez odpoczynku. Latającym Holendrem żartobliwie określa się kogoś, kto jest włóczęgą, włóczykijem, obieżyświatem, wszędobylskim, nie umiejącym usiedzieć w jednym miejscu. Związek frazeologiczny – latający Holender http://eduseek.interklasa.pl/artykuly/artykul/ida/44/idc/20/

68
GPS Latający Holender (ang. Flying Dutchman) to klasa jachtów. Są to jachty o powierzchni ożaglowania podstawowego 18,8 m 2 i żaglu wypukłym zwanym spinakerem (motylem) o pow. 20,5 m 2. Oznaczenie na żaglu: FD. Latający Holender – klasa jachtu http://pl.wikipedia.org/wiki/Spinaker www.sailfd.org/POL/POL.html
 o pow. 20,5 m 2. Oznaczenie na żaglu: FD. Latający Holender – klasa jachtu")
82
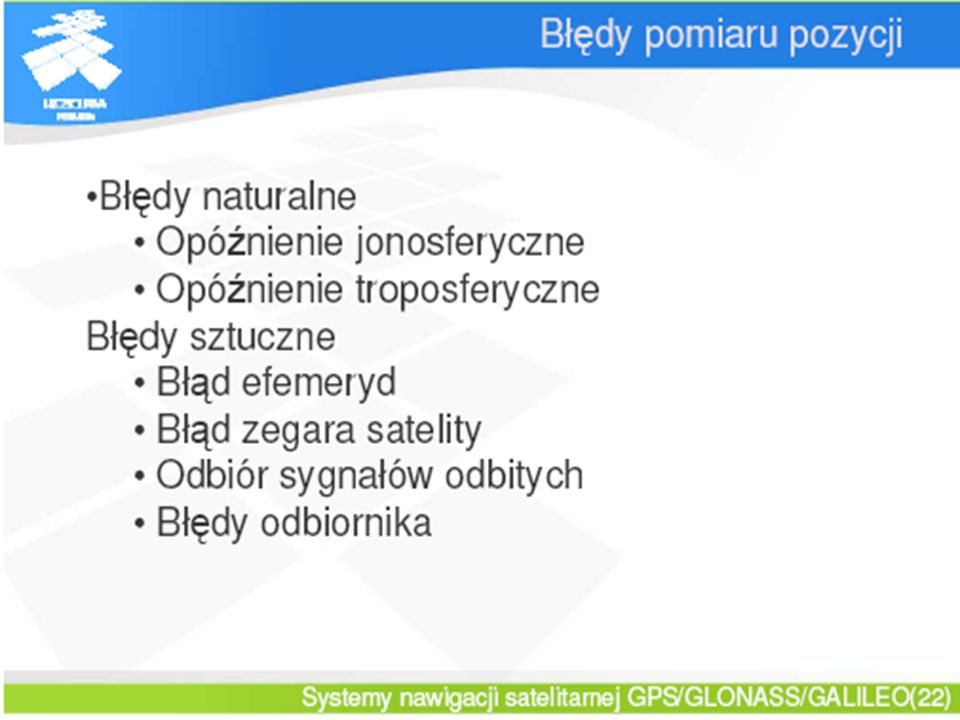
BŁĘDY SYSTEMU 1. Błędy pomiaru pseudoodległości Rodzaj (przyczyna) Odch. stand. [m] Opóźnienie sygnału w jonosferze2,3- 5,0 Opóźnienie sygnału w troposferze1,5 - 2,0 Wielotorowość i zanik sygnału w terenie1,2 - 2,5 Szumy i ograniczenie rozdzielczości odbiornika1,5 Błędy efemeryd (położenia satelitów na sferze niebieskiej)4,2 Błędy zegarów na satelitach3,0 Łączny błąd pseudoodległości6.6-8.0 2. Błąd rozmycia dokładności geometrycznej pozycji (geometrie dilution of precision - GDOP) Łączna dokładność wyznaczania pozycji: 10 - 20 m
4,2 Błędy zegarów na satelitach3,0 Łączny błąd pseudoodległości Błąd rozmycia dokładności geometrycznej pozycji (geometrie dilution of precision - GDOP) Łączna dokładność wyznaczania pozycji: m.")
83
GLOBALNY SYSTEM NAWIGACJI SATELITARNEJ GALILEO Od połowy lat 90-tych trwają wspólne prace Europejskiej Agencji Kosmicznej (European Space Agency) oraz Komisji Europejskiej nad globalnym systemem nawigacji satelitarnej GNSS (Global Navigation Satellite System), kt ó ry byłby odpowiedzią na gwałtownie rosnące zapotrzebowanie na usługi z tego sektora, a także na pewne niedogodności istniejących system ó w. Pierwszym etapem tych prac było stworzenie koncepcji systemu EGNOS (European Geostationary Navigation Overlay Service), wykorzystującego i wspomagającego pracę system ó w GPS i GLONASS, kt ó ry poprawiał podstawowe parametry jakościowe pracy tych system ó w, tj. dokładność, dostępność, ciągłość i wiarygodność. W 1999 roku zaakceptowano program GALILEO, kt ó ry zakłada stworzenie projektu i – do 2008 roku – uruchomienie systemu nawigacji w pełni kompatybilnego z istniejącymi systemami, ale jednocześnie niezależnego od nich, będącego pod międzynarodową cywilną kontrolą. Ten ostatni aspekt wyr ó żnia GALILEO od dw ó ch największych system ó w nawigacji satelitarnej, tj. GPS i GLONASS, kt ó re są systemami o pochodzeniu wojskowym, z kt ó rych wyodrębniono pewien zakres usług dla powszechnego użytku, nadzorowanymi przez jeden tylko kraj (odpowiednio: USA i Rosję).
, wykorzystującego i wspomagającego pracę system ó w GPS i GLONASS, kt ó ry poprawiał podstawowe parametry jakościowe pracy tych system ó w, tj. dokładność, dostępność, ciągłość i wiarygodność. W 1999 roku zaakceptowano program GALILEO, kt ó ry zakłada stworzenie projektu i – do 2008 roku – uruchomienie systemu nawigacji w pełni kompatybilnego z istniejącymi systemami, ale jednocześnie niezależnego od nich, będącego pod międzynarodową cywilną kontrolą. Ten ostatni aspekt wyr ó żnia GALILEO od dw ó ch największych system ó w nawigacji satelitarnej, tj. GPS i GLONASS, kt ó re są systemami o pochodzeniu wojskowym, z kt ó rych wyodrębniono pewien zakres usług dla powszechnego użytku, nadzorowanymi przez jeden tylko kraj (odpowiednio: USA i Rosję)..")
84
GLOBALNY SYSTEM NAWIGACJI SATELITARNEJ GALILEO Segment kosmiczny Segment kosmiczny będzie się składał z 27 satelitów operacyjnych i 3 zapasowych, równomiernie rozmieszczonych na 3 orbitach. Wysokość orbity będzie wynosić 23 222 km, a kąt inklinacji 56°. Satelity będą nadawać 10 sygnałów w trzech pasmach częstotliwości. Sygnały oznaczone numerami 1, 2, 3, 4, 9 i 10 będą dostępne dla wszystkich użytkowników o ile ich odbiorniki będą zapewniały taką funkcjonalność. Pozostałe sygnały będą szyfrowane i dostępne tylko dla użytkowników mających dostęp do serwisu komercyjnego CS i serwisu regulowanego publicznie PRS. Część sygnałów nie będzie zawierać żadnych danych, będzie przeznaczona do wyznaczania poprawki jonosferycznej w celu zwiększenia dokładności. To jest istotna zaleta Galileo, gdyż częstotliwość porównawcza w systemie GPS nie jest swobodnie dostępna, co istotnie wpływa na dokładność pomiarów.

85
ZASTOSOWANIA System lokalizacji pojazdów SpyBox System zarządzania taborem przy pomocy lokalizacji satelitarnej GPS oraz telefonii komórkowej GSM. Zasadniczym elementem systemu jest urządzenie o nazwie SpyBox, które pozwala śledzić w czasie rzeczywistym trasę pojazdów a tym samym zlokalizować ładunek. SpyBox przesyła informację o położeniu do komputera centralnego, skąd właściciel pojazdu może nie tylko pobrać informacje o lokalizacji, prędkości itp., ale również kontrolować pojazd i zdalnie zatrzymać silnik, jeśli zauważy nieprawidłowości. Obsługa odbywa się bezpośrednio przez Internet, użytkownik nie musi instalować żadnego oprogramowania, żeby zarządzać swoim taborem. Współpracuje z systemem terestrycznych map elektronicznych MapPoint.

86
ZASTOSOWANIA Samochodowy system nawigacji satelitarnej (GeoSat2 Car Navigator) Samochodowy system nawigacji satelitarnej GeoSat2 jest przenośnym urządzeniem typu plug-and-play niewymagającym dodatkowych instalacji. GeoSat2 zawiera szczegółowe mapy 19 krajów Europy, w tym drogową mapę Polski wraz ze szczegółowymi planami 7 aglomeracji. Pozwala to na poznanie dokładnej pozycji Twojego pojazdu gdziekolwiek jesteś oraz zaplanowanie najlepszej i najbardziej optymalnej trasy do miejsca Twojego przeznaczenia. GeoSat2 łączy w sobie funkcjonalność wysoce zaawansowanego systemu pozycjonującego GPS z systemem prezentacji map elektronicznych. Pomimo swych niewielkich rozmiarów, 156x110x25mm oraz małej wagi, 400g, GeoSat2 wyposażony jest w wyświetlacz LCD o przekątnej 5,6” o rozdzielczości 320x240.

87
Global Acoustic Positioning System (GAPS)
")
88
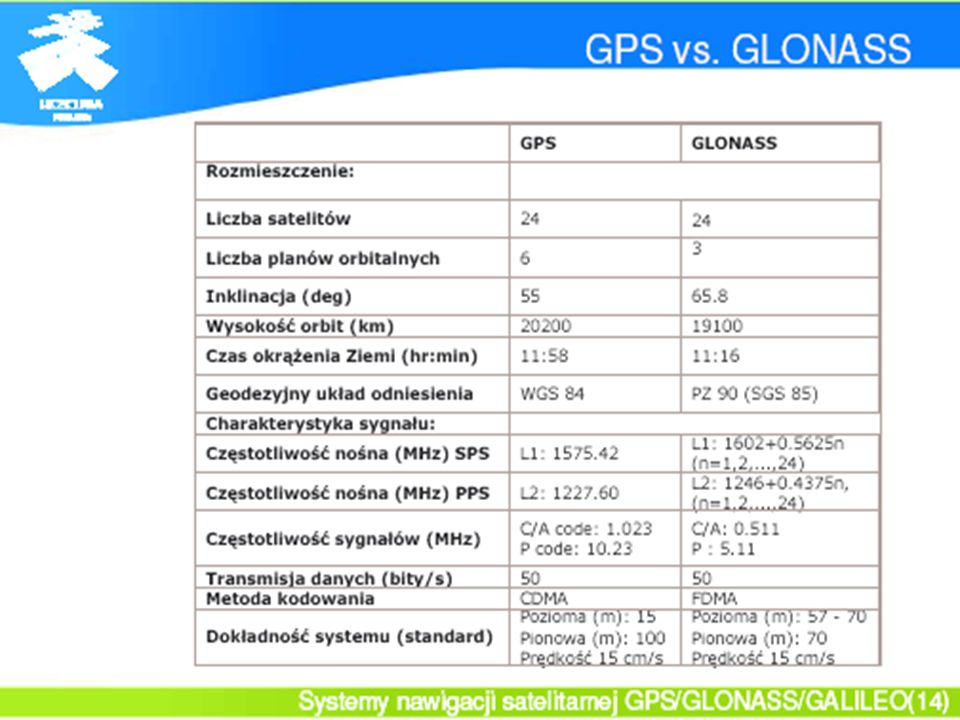
PARAMETR SYSTEM GALILEOGLONASSGPS Liczba orbit 336 Liczba satelitów na jednej orbicie 9 + 184 do 6 Łączna liczba satelitów 27 + 32428 Wysokość orbity, km 23 61619 10020 183 Kąt inklinacji 5664,855 Okres obiegu ziemi przez satelitę 14h 21 min 16s11h 15min 44s11 h 57 min 58 s Długość jednego obiegu ziemi, km 188 408160 033166 837 Rozmieszczenie satelitów na orbicie równomierny

Podobne prezentacje





>")

. Od pięciu do siedmiu zadań. Ćwiczenia: –Obecność na ćwiczeniach. –Pozytywne oceny.>")

 1. Energia mechaniczna 2. Praca 3.>")


 – dziedzina telekomunikacji przekazuj ą ca ruchomy obraz oraz d ź wi ę k na odległo ść. W jednym miejscu za pomoc ą kamery telewizyjnej.>")










