Automatyka Wykład 27 Linie pierwiastkowe dla układów dyskretnych
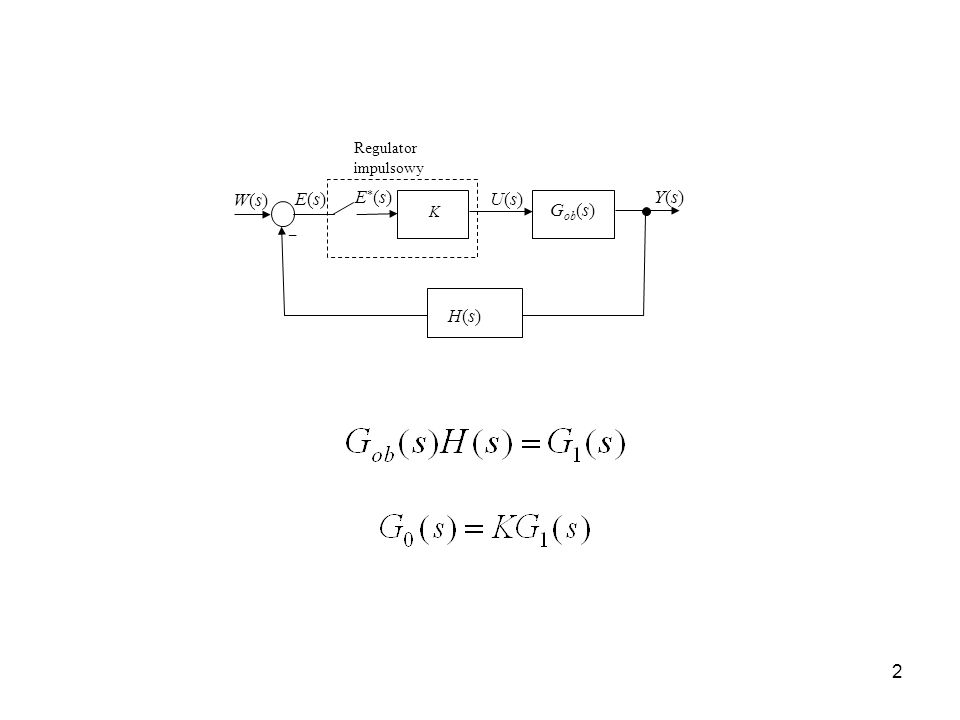
Regulator impulsowy W(s) E(s) E(s) U(s) Y(s) K Gob(s) – H(s)
Własności linii pierwiastkowych 1+ KG1(z) = 0 1. Punkty dla K = 0 Punkty dla K = 0 są biegunami transmitancji G1(z), obejmując również takie, które znajdują się w z = 2. Punkty dla K= ± Punkty dla K= ± są zerami transmitancji G1(z), zawierając 3. Liczba oddzielnych linii Całkowita liczba linii pierwiastkowych jest równa stopniowi równania pierwiastkowych M(z) = 0. również te które znajdują się w z = 4. Symetria linii Linie pierwiastkowe są symetryczne względem osi liczb pierwiastkowych rzeczywistych i czasami innej pionowej osi symetrii pojawiającej się w konfiguracji zero-biegunowej transmitancji KG1(z). 5. Asymptoty linii Dla dużych wartości z, linie pierwiastkowe (K > 0) są zbieżne do pierwiastkowych gdy asymptot, których kąty są wyznaczane z następujących zależności: Dla linii pierwiastkowych (K < 0) gdzie i = 0, 1, 2, ...,| n - m| -1; n = liczba skończonych biegunów transmitancji G1(z) m = liczba skończonych zer transmitancji G1(z).
6. Punkt przecięcia (a) Punkt przecięcia asymptot występuje tylko na osi liczb rzeczywistych asymptot (b) Punkt przecięcia asymptot wyznaczany jest ze wzoru 7. Linie pierwiastkowe na Linia pierwiastkowa (K > 0) występuje w tych odcinkach osi liczb osi liczb rzeczywistych: rzeczywistych dla których suma rzeczywistych zer i biegunów transmitancji G1(z) z prawej strony tego odcinka jest parzysta. Jeśli całkowita liczba zer i biegunów z prawej strony odcinka jest nieparzysta, wówczas występuje linia pierwiastkowa dla (K < 0). 8. Kąty wejścia i wyjścia: Kąty wejścia lub wyjścia linii pierwiastkowej do bieguna lub zera transmitancji G1(z) mogą być wyznaczone przy założeniu punktu, który jest bardzo blisko rozważanego bieguna lub zera przez zastosowanie równania dla (K > 0) dla (K < 0) gdzie i = 0, 1, 2, 3, ....
9. Punkty przecięcia linii 9. Punkty przecięcia linii Punkty przecięcia linii pierwiastkowych z osią liczb urojonych pierwiastkowych z odpowiadają wartościom K, które mogą być wyznaczone przy okręgiem użyciu kryterium Routha. jednostkowym 10. Punkty rozgałęzień Punkty rozgałęzień na linii pierwiastkowej są wyznaczane z zależności dK/ dz = 0 , lub dG1(z)/ dz = 0 . Są to tylko warunki konieczne. 11. Obliczenie wartości K Wartość bezwzględną K w pewnym punkcie z1 należącym do linii na podstawie linii pierwiastkowej pierwiastkowej, wyznacza się na podstawie zależności:
Linie stałego współczynnika tłumienia ξ i stałej pulsacji ωn Gdy to Gdy to
Analiza układów regulacji impulsowej z modulacją amplitudy impulsów Y(s) Gob(s) – W(s) E(s) U(s) E(s) Regulator impulsowy Element formujący Rys. 2. Schemat blokowy układu regulacji impulsowej z regulatorem proporcjonalnym Elementami układu regulacji impulsowej są: impulsator idealny, element formujący impulsy sterujące (impulsator rzeczywisty), obiekt regulacji.
Impulsator idealny e(3Tp)(t-3Tp) 0 Tp 2Tp 3Tp t 0 Tp 2Tp 3Tp t e(t) e(2Tp) e(3Tp) e(0) e(0)(t)
Element formujący impulsy sterujące zmodulowane amplitudowo t 0 Tp 2Tp 3Tp u(0) u(Tp) u(2Tp) u(3Tp) u
Transmitancja operatorowa układu otwartego Transmitancja dyskretna układu regulacji impulsowej z regulatorem P o wzmocnieniu ki Transmitancja elementu formującego łącznie z regulatorem proporcjonalnym Transmitancja operatorowa układu otwartego
Transmitancja dyskretna układu regulacji impulsowej z obiektem inercyjnym I-go rzędu
Transmitancja dyskretna układu otwartego Transmitancja dyskretna układu zamkniętego
Analiza układu regulacji impulsowej Y(z) G0(z) – Y(z) W(z) E(z)
Dla układu stabilnego (warunek stabilności) Uchyb ustalony
Dla mamy