Elektroniczne Układy i Systemy Zasilania Wykład 3 Politechnika Śląska w Gliwicach Wydział Automatyki, Elektroniki i Informatyki dr inż. Ryszard Siurek
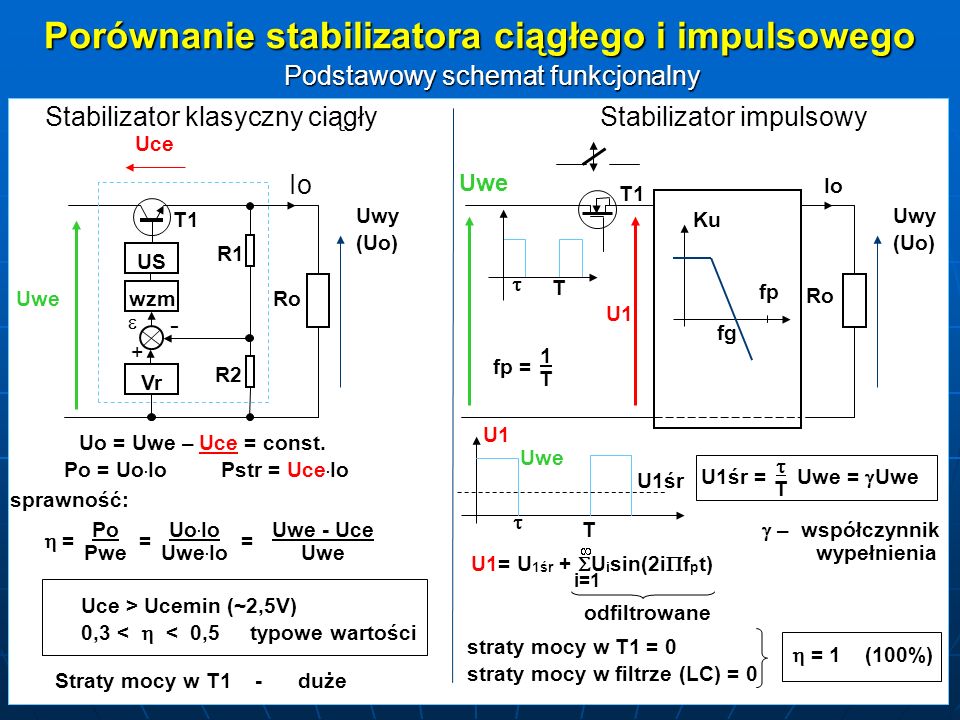
Porównanie stabilizatora ciągłego i impulsowego Podstawowy schemat funkcjonalny Stabilizator klasyczny ciągły Stabilizator impulsowy Uce Io Uwe Io T1 T1 Uwy (Uo) Ku Uwy (Uo) R1 US t T fp Uwe wzm Ro Ro U1 e - fg + 1 T fp = R2 Vr U1 Uo = Uwe – Uce = const. Po = Uo.Io Pstr = Uce.Io Uwe t T U1śr U1śr = Uwe = gUwe sprawność: t Po Pwe Uo.Io Uwe.Io Uwe - Uce Uwe T g – współczynnik wypełnienia h = = = U1= U1śr + SUisin(2iPfpt) i=1 Uce > Ucemin (~2,5V) 0,3 < h < 0,5 typowe wartości odfiltrowane straty mocy w T1 = 0 straty mocy w filtrze (LC) = 0 h = 1 (100%) Straty mocy w T1 - duże
STEROWNIK IMPULSOWY „STSI” Szeregowy Tranzystor Szeregowa Indukcyjność T L IT IL Io ID IC ~ UC Uwe U1 D UC Ro U0 C U0 Założenia: Dioda D i tranzystor T są idealnymi elementami przełączającymi Rezystancja szeregowa dławika L jest pomijalna (rL = 0) Pojemność kondensatora C jest bardzo duża (DUc << Uo) EL EL T T I takt II takt Uwe D Io Uwe D Io EC EC T – przewodzi, D – nie przewodzi T – nie przewodzi, D – przewodzi
Obliczamy IL korzystając z metody superpozycji Analiza podstawowych przebiegów w stabilizatorze STSI U1 I takt - schemat zastępczy 0 < t < t ~ ‘ L rL= 0 IL ILmin I0 t t T ~ UC IT Ro U0 U1 = Uwe ILmin t ~ ILmax UC << U0 IL , Obliczamy IL korzystając z metody superpozycji ILmin t ID ILmin t t IC t <<1 ~ UC t Uc(0) zmiana prądu w dławiku
Obliczamy IL korzystając z metody superpozycji „ II takt - schemat zastępczy t < t < T U1 ~ L rL= 0 IL ILmax I0 t ~ t T UC IT U0 Ro U0 ILmin t „ ~ ILmax UC << U0 IL I0 Obliczamy IL korzystając z metody superpozycji ILmin t ID ILmax analogicznie jak poprzednio: ILmin t zmiana prądu w dławiku IC t w stanie ustalonym: ~ UC Uc(t) t Funkcja przejścia sterownika STSI
Dobór indukcyjności i pojemności, przykładowe obliczenia dla regulatora impulsowego STSI Założenia: Uwe = 10 – 15V, Uo = 5V, Io = 10A, f = 100kHz z reguły przyjmuje się: DIL < 0,1 – 0,2 I0max zakładamy: DIL < 1A z danych wejściowych wynika: dla tmin dla tmax Przyjmujemy L = 3 mH – 4 mH Załóżmy w przybliżeniu, że składowa zmienna napięcia na kondensatorze wynosi: Przyjmijmy: Przyjmujemy C = 1000 mF