Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Politechniki Poznańskiej
WSPOMAGANIE DECYZJI I Roman Słowiński Zakład Inteligentnych Systemów Wspomagania Decyzji Instytut Informatyki Politechniki Poznańskiej

2
Problem decyzyjny: Istnieje cel lub cele do osiągnięcia
Istnieją alternatywne sposoby osiągnięcia tego celu (celów) Wybór najlepszego sposobu nie jest trywialny
 Wybór najlepszego sposobu nie jest trywialny.")
3
Modele problemów decyzyjnych: Modele teorio-decyzyjne:
- optymalizacyjny (badania operacyjne) - wielokryterialny (wielokryterialne wspomaganie decyzji) Modele sztucznej inteligencji: - symboliczny (maszynowe uczenie się) - neuronowy (sztuczne sieci neuronowe)
 - wielokryterialny (wielokryterialne wspomaganie decyzji) Modele sztucznej inteligencji: - symboliczny (maszynowe uczenie się) - neuronowy (sztuczne sieci neuronowe)")
4
Modelowanie matematyczne
Reprezentacja problemu decyzyjnego z użyciem funkcji i/lub relacji porządkujących. Forma reprezentacji: programowanie matematyczne, relacja preferencji w zbiorze wariantów decyzyjnych. Maszynowe uczenie się Budowanie reprezentacji problemu decyzyjnego na drodze analizy przykładów decyzji (przykładów uczących). Forma reprezentacji: wyrażenia logiczne, reguły decyzyjne, drzewa decyzyjne, sieci semantyczne.
. Forma reprezentacji: wyrażenia logiczne, reguły decyzyjne, drzewa decyzyjne, sieci semantyczne.")
5
Modelowanie problemów decyzyjnych a niedoskonałość informacji
Rachunek prawdopodobieństwa i statystyka matematyczna [ Bernoulli, 1700] – niepewność wynikająca z przypadkowej zmienności parametrów (werystyczna). Aksjomat o addytywności prawdopodobieństw zdarzeń rozłącznych: P(A) + P(A) = 1 Teoria zbiorów rozmytych [Zadeh, 1965] – niepewność natury subiektywnej (posybilistyczna) i nieostrość pojęć. Teoria zbiorów przybliżonych [Pawlak, 1982] – niepewność wynikająca z granularności informacji (niespójność, dwuznaczność).
. Aksjomat o addytywności prawdopodobieństw zdarzeń rozłącznych: P(A) + P(A) = 1. Teoria zbiorów rozmytych [Zadeh, 1965] – niepewność natury subiektywnej (posybilistyczna) i nieostrość pojęć. Teoria zbiorów przybliżonych [Pawlak, 1982] – niepewność wynikająca z granularności informacji (niespójność, dwuznaczność).")
6
Teoria zbiorów rozmytych

7
Teoria zbiorów rozmytych

8
Teoria zbiorów rozmytych

9
Teoria zbiorów rozmytych

10
Teoria zbiorów rozmytych
(por. aksjomat APZR)
")
11
Teoria zbiorów rozmytych

12
Teoria zbiorów rozmytych

13
Teoria zbiorów rozmytych

15
Teoria zbiorów przybliżonych
Reprezentacja zbioru X (czerwony) w terminach atrybutów (zmiennych) Ai i Bj
 w terminach atrybutów (zmiennych) Ai i Bj.")
16
Należy: z = f(x) ® MIN (lub MAX) przy ograniczeniach: gi(x) i=1,...,m
Model programowania matematycznego: rozwiązanie (wariant decyzyjny): x=[x1,...,xn] funkcja celu (kryterium): f(x) ograniczenia definiujące zbiór A rozwiązań dopuszczalnych (wariantów decyzyjnych): gi(x), i=1,...,m Problem programowania matematycznego: Należy: z = f(x) ® MIN (lub MAX) przy ograniczeniach: gi(x) i=1,...,m
: x=[x1,...,xn] funkcja celu (kryterium): f(x) ograniczenia definiujące zbiór A rozwiązań dopuszczalnych. (wariantów decyzyjnych): gi(x), i=1,...,m. Problem programowania matematycznego: Należy: z = f(x) ® MIN (lub MAX) przy ograniczeniach: gi(x) i=1,...,m.")
17
Problem programowania liniowego (PL)
")
18
Wielokryterialny problem PL (WPL)
")
19
Przykład: „problem diety”
Opracować dietę złożoną z dwóch produktów, A i B, zawierających trzy składniki odżywcze, Składnik odżywczy Zawartość w produkcie A produkcie B Pożądane ilości składników M1 9 3 ≥ 45 M2 1 4 ≥ 16 M3 2 ≤ 20 Cena jednostkowa 200 400 znaleźć dietę o minimalnym koszcie wariant decyzyjny (rozwiązanie) – ilość produktów A i B w diecie:
 – ilość produktów A i B w. diecie:")
20
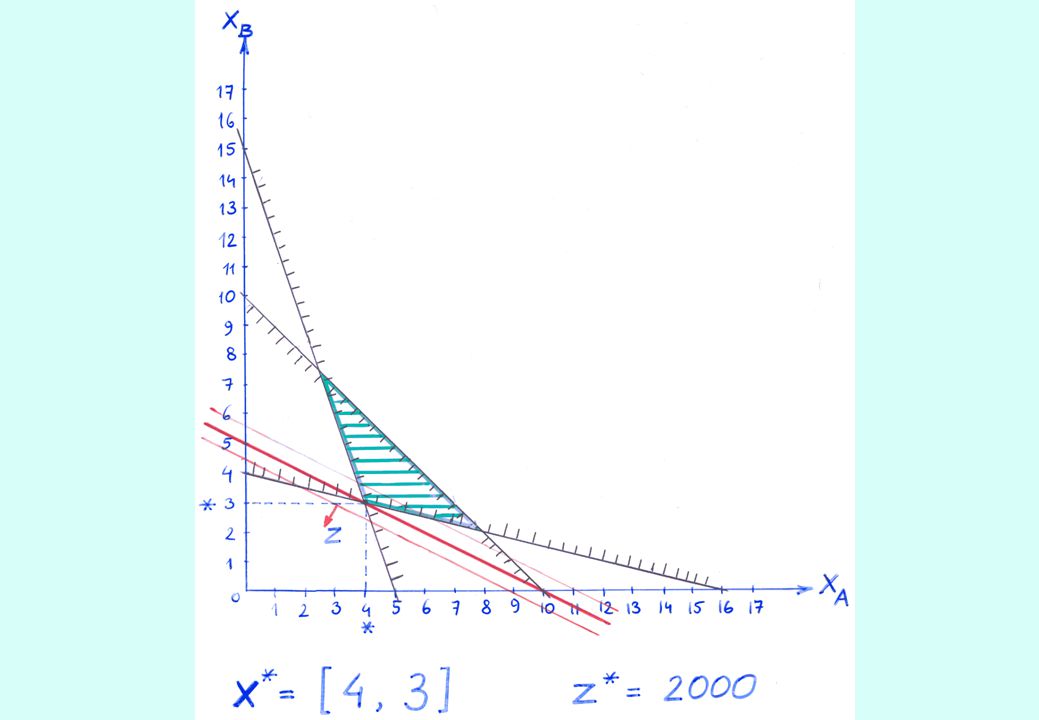
„Problem diety” jako problem PL

22
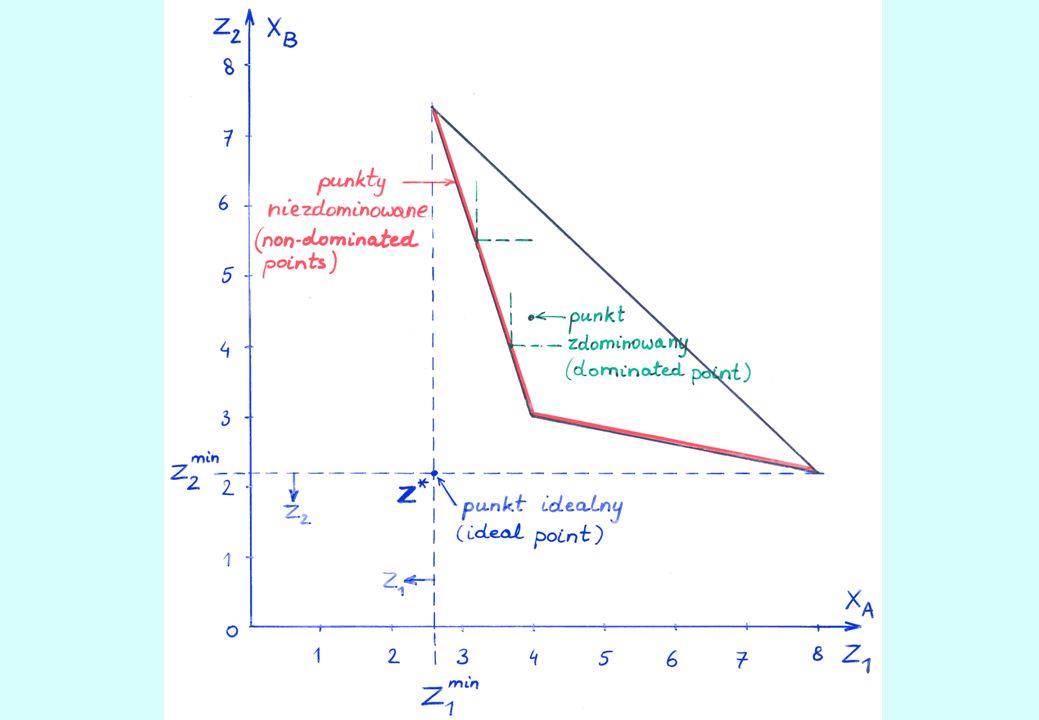
„Problem diety” jako problem WPL

24
Funkcja skalaryzująca:

25
Funkcja skalaryzująca:

26
Podstawowe kategorie problemów decyzyjnych
w odniesieniu do zbioru wariantów decyzyjnych A Klasyfikacja lub sortowanie ... x x x x x x x x x x x x x x x A klasa 1 klasa 2 klasa p klasa 1 klasa 2 ... klasa p

27
Wybór lub optymalizacja
x x x x x x x x x x wybrany podzbiór A' odrzucony podzbiór A \ A'

28
Porządkowanie wg. malejących preferencji
preporządek częściowy A * x * * x x x x x * * x

Podobne prezentacje