Pobierz prezentację
1
Modele dyskretne obiektów liniowych
Podstawy teorii sygnałów, systemów i sterowania Wykład 10 Modele dyskretne obiektów liniowych dykretne równanie wejście - wyjście, dyskretne równania stanu i równanie wyjścia, transmitancja dyskretna

2
1.Dyskretne równanie wejście - wyjście
(1) (2) - różnica pierwszego rzędu
 (2) - różnica pierwszego rzędu.")
3
(3) (4)
 (4)")
4
2. Dyskretne równania stanu i równanie wyjścia

5
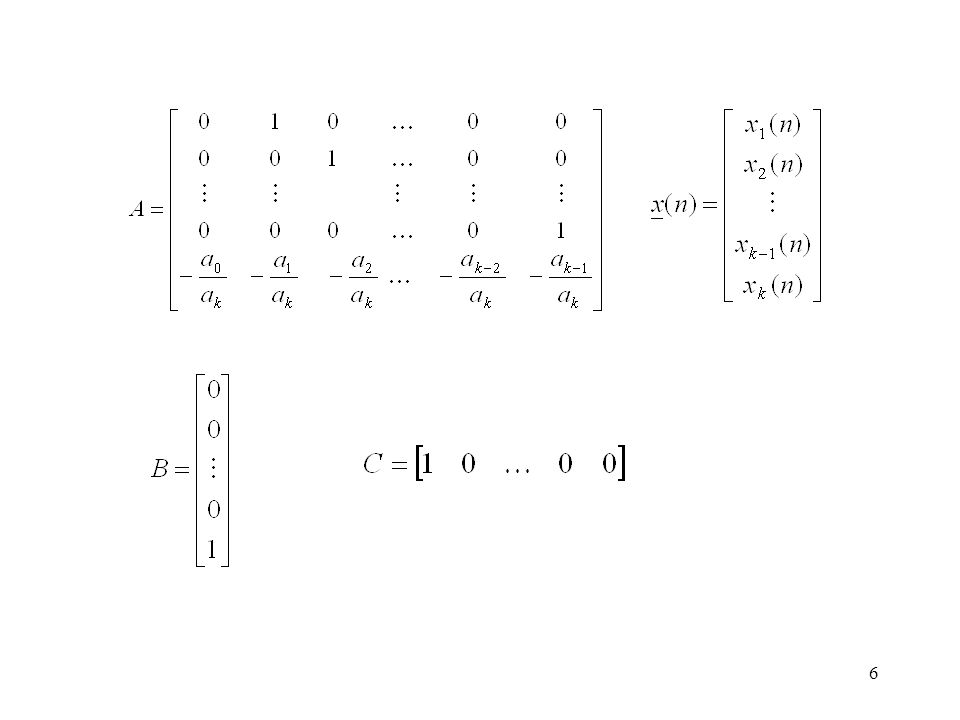
Dyskretne równania stanu
- dyskretne równanie wyjscia Zapis wektorowo-macierzowy dysketnych równań stanu i równania wyjścia

7
Przekształcenie Z (przekształcenie Laurenta)
u(t)
")
8
Jeśli t = nTp to Dyskretna transformata Laplace’a Transformata Z

9
Transformaty Z niektórych sygnałów dyskretnych
- dyskretny skok jednostkowy - dyskretny sygnał wykładniczy

10
- dyskretny sygnał liniowy

11
Transformaty Z funkcji dyskretnych przesuniętych
Transformaty Z różnicy funkcji dyskretnych u(0) = 0
 = 0.")
12
Transformata Z sumy fnkcji dyskretnej
Transformata splotu funkcji dyskretnych

13
Twierdzenie o wartości początkowej funkcji dyskretnej
Twierdzenie o wartości końcowej funkcji dyskretnej

14
Transmitancja dyskretna
Wykład 11 Transmitancja dyskretna

15
Transmitancja dyskretna (transmitancja Z)
")
16
Dla p = 1 (p – krotność bieguna funkcji Y(z) )
 )")
17
Wyznaczyć funkcję dyskretną y(nTp), której transformata
Rozwiązanie .

18
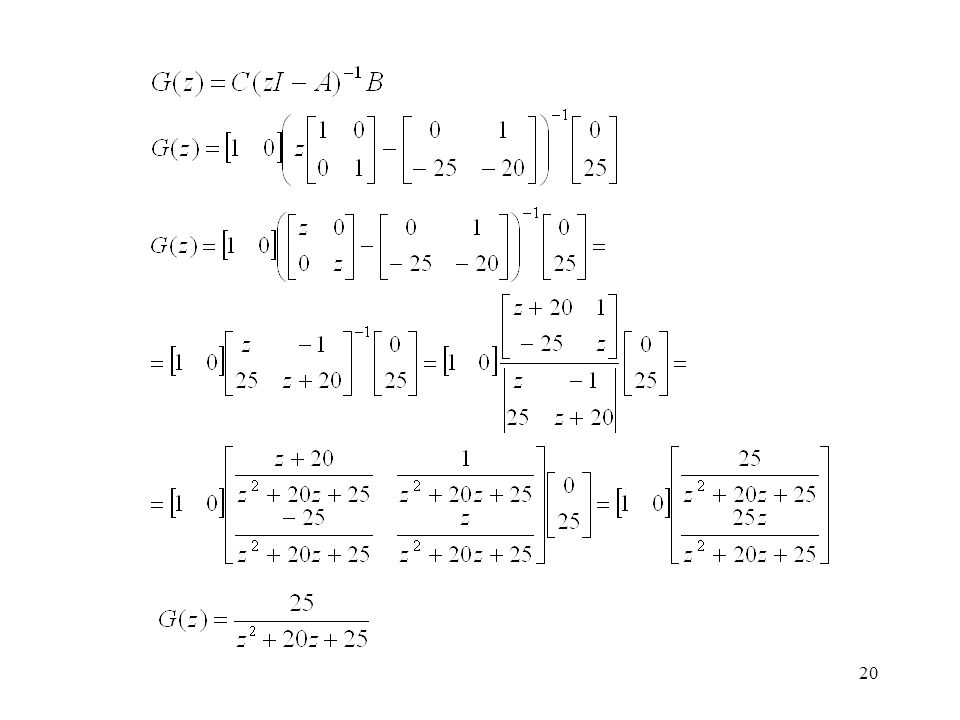
Wyznaczanie transmitancji dyskretnej na podstawie równań stanu i równania wyjścia

19
Znaleźć dyskretne równania stanu i transmitancje dyskretną obiektu,
którego równanie wejście–wyjście jest równaniem różnicowym drugiego rzędu o postaci Rozwiązanie





 Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla.>")
>")






 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji (c.d.)>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")




