Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Karol Rumatowski d1. cie. put. poznan. pl Karol. Rumatowski@ put
Karol Rumatowski d1.cie.put.poznan.pl put.poznan.pl Automatyka Wykład 1

2
Literatura 1. Horla D., Podstawy automatyki. Ćwiczenia rachunkowe. Cz.I, WPP, Poznań, 2008. 2. Horla D., Podstawy automatyki. Ćwiczenia rachunkowe. Cz.II, WPP, 3. Kaczorek T.: Teoria układów regulacji automatycznej, WNT, Warszawa, 1977. 6. Rumatowski K.: Podstawy automatyki. Część 1. Układy liniowe o działaniu ciągłym, Wydawnictwo Politechniki Poznańskiej, Poznań, 2004. 7. Rumatowski K.: Podstawy automatyki. Część 2. Układy dyskretne. Sygnały stochastyczne, Wydawnictwo Politechniki Poznańskiej, 2005. 8. Rumatowski K.: Podstawy regulacji automatycznej, WPP, 2008. 9. Żelazny M.: Podstawy automatyki, PWN, Warszawa, 1976. 4. Paraskevopoulos P.N.: Modern Control Engineering, Marcel Dekker, Inc., New York, 2002. 5. Pułaczewski J., Szacka K., Manitius A.: Zasady automatyki, WNT, Warszawa, 1974.

3
Cel i zakres wykładów Cel wykładów: zapoznanie słuchaczy z zasadami pracy, rodzajami i własnościami układów regulacji automatycznej. Zakres wykładów: Historia automatyki. Sterowanie i regulacja, obiekt sterowania (regulacji), urządzenie sterujące (regulator, sterownik, kontroler), układ regulacji automatycznej, sygnały w układach regulacji, układ automatyki przemysłowej. Rodzaje układów regulacji automatycznej. Regulacja ciągła (analogowa). Regulacja dyskretna (cyfrowa i impulsowa). Regulacja dwu- i trójpołożeniowa.
, urządzenie sterujące (regulator, sterownik, kontroler), układ regulacji automatycznej, sygnały w układach regulacji, układ automatyki przemysłowej. Rodzaje układów regulacji automatycznej. Regulacja ciągła (analogowa). Regulacja dyskretna (cyfrowa i impulsowa). Regulacja dwu- i trójpołożeniowa.")
4
Heron żyjący w I wieku n. e
Heron żyjący w I wieku n.e. wynalazca z Aleksandrii opisał i wykonał wiele urządzeń. Wśród nich znajduje się automat na monety. Po wrzuceniu monety otrzymywało się niewielką ilość wody do obmycia twarzy i rąk. Automat ten działał następująco: moneta spadała na niewielką tacę doczepioną do końca beleczki znajdującej się w równowadze. Pod ciężarem monety koniec belki opadał, a drugi wznosił się, otwierając zawór i umożliwiając wypływ wody.

5
Regulator prędkości obrotowej Watta (1784 r.)
")
6
Pierwszym automatem obróbkowym było „dzieło” Christophera Spencera (1833 –1922)
z USA, który w 1873 roku rozbudował tokarkę rewolwerową w automatyczną obrabiarkę Hartford i w której krzywki sterowały dźwigniami przesuwającymi obrabiane przedmioty i zmieniały narzędzia. Automat Spencera wytwarzał w dużych ilościach śruby, nakrętki i koła zębate do maszyn do szycia. Ponadto Spencer założył wkrótce Hartford Machine Skrew Company, której automatyczne obrabiarki stały się przykładowymi dla tworzącego się przemysłu budowy maszyn i przyczyniły się do rozwoju ręcznie sterowanych obrabiarek. Dalsze „wynalazki” automatów doprowadzają do powstania w latach dwudziestych XX wieku nowej dyscypliny naukowej – automatyki, obejmującej teorię konstruowania automatów i automatyzacji, tj. samodzielnego regulowania, sterowania i kontrolowania różnych procesów i czynności. Automatyzacja przemysłu rozwinęła się na szeroką skalę w Stanach Zjednoczonych po I wojnie światowej – głównie w dziedzinach technologii chemicznej i przesyłania energii elektrycznej. W 1923 roku w USA rozpoczęła pracę pierwsza automatyczna linia produkcyjna.

7
Tak duży postęp w automatyce stał się możliwy w wyniku licznych odkryć i wynalazków
pozwalających na mierzenie wielkości fizycznych (np. napięcia elektrycznego, ciśnienia), a także w wyniku rozwinięcia umiejętności łączenia mierników tych wielkości z urządzeniami sterowania i regulacji. Następne wynalazki, m.in. radar, półprzewodniki, urządzenia elektroniczne i izotopowe, pozwoliły na skonstruowanie jeszcze bardziej skomplikowanych automatów, takich jak: automatyczny pilot w lotnictwie, sternik automatyczny w żegludze oraz całe systemy, np. układ samoczynnego hamowania pociągów na trasach kolei podziemnych o bardzo dużym ruchu. Duży wpływ na rozwój automatyki związanej z lotnictwem miał pierwszy bezzałogowy lot w dniu 1 sierpnia 1947 roku. Dzięki zastosowaniu bardzo skomplikowanego automatu samolot typu Douglas 054 Skymaster przeleciał nad Oceanem Atlantyckim trasę o długości 3840 km bez pilota. Automatyczny pilot zainstalowany na pokładzie samolotu zawierał aparaty: utrzymujące równowagę samolotu, startu, lądowania, zdalnego sterowania falami radiowymi oraz maszynę matematyczną. Maszyna ta odbierając sygnały radiowe stacji sterujących, umieszczonych na trasie lotu, obliczała aktualne położenie samolotu i na tej podstawie sterowała aparaturą pilotażu. Ta sama maszyna sterowała również rozruchem silników, startem i końcowym lądowaniem samolotu. Po II wojnie światowej następuje kolejny skok w poziomie automatyzacji przemysłowej – w latach pięćdziesiątych zaczyna się wykorzystywać obrabiarki sterowane numerycznie, w latach siedemdziesiątych roboty przemysłowe i zautomatyzowane magazyny, a w latach osiemdziesiątych buduje się całkowicie zautomatyzowane linie produkcyjne.
, a także w wyniku rozwinięcia umiejętności łączenia mierników tych wielkości z urządzeniami sterowania i regulacji. Następne wynalazki, m.in. radar, półprzewodniki, urządzenia elektroniczne i izotopowe, pozwoliły na skonstruowanie jeszcze bardziej skomplikowanych automatów, takich jak: automatyczny pilot w lotnictwie, sternik automatyczny w żegludze oraz całe systemy, np. układ samoczynnego hamowania pociągów na trasach kolei podziemnych o bardzo dużym. ruchu. Duży wpływ na rozwój automatyki związanej z lotnictwem miał pierwszy bezzałogowy. lot w dniu 1 sierpnia 1947 roku. Dzięki zastosowaniu bardzo skomplikowanego automatu. samolot typu Douglas 054 Skymaster przeleciał nad Oceanem Atlantyckim trasę o długości km bez pilota. Automatyczny pilot zainstalowany na pokładzie samolotu zawierał. aparaty: utrzymujące równowagę samolotu, startu, lądowania, zdalnego sterowania falami. radiowymi oraz maszynę matematyczną. Maszyna ta odbierając sygnały radiowe stacji. sterujących, umieszczonych na trasie lotu, obliczała aktualne położenie samolotu i na tej. podstawie sterowała aparaturą pilotażu. Ta sama maszyna sterowała również rozruchem. silników, startem i końcowym lądowaniem samolotu. Po II wojnie światowej następuje kolejny skok w poziomie automatyzacji przemysłowej – w latach pięćdziesiątych zaczyna się wykorzystywać obrabiarki sterowane numerycznie, w. latach siedemdziesiątych roboty przemysłowe i zautomatyzowane magazyny, a w latach. osiemdziesiątych buduje się całkowicie zautomatyzowane linie produkcyjne.")
8
Na taki rozwój automatyzacji ogromny wpływ miały urządzenia elektroniczne, a w
szczególności komputery. To one właśnie zaczęły wspomagać człowieka w sterowaniu i kontrolowaniu złożonych procesów produkcyjnych oraz w zarządzaniu zakładami produkcyjnymi. W dalszych latach rozwój techniki cyfrowej w zakresie przesyłania informacji między komputerami umożliwił połączenie sterowania wytwarzaniem i transportem materiałów z zarządzaniem produkcją – powstało zintegrowane komputerowo wytwarzanie. Ostatnie dwadzieścia lat XX wieku, to intensywny rozwój automatyki nie tylko w przemyśle, ale w cały naszym życiu – w domach, biurach, szpitalach, transporcie, badaniach naukowych itp. Żelazka z termoregulatorami, pralki automatyczne, odkurzacze, aparaty fotograficzne, zabawki, faksy, kopiarki, bankomaty, tomografy komputerowe, protezy kończyn, automatyczne skrzynie biegów, hamulce przeciwpoślizgowe ABS, radia wyszukujące samoczynnie stacje nadawcze, światła na skrzyżowaniach ulic, samodzielnie otwierające się drzwi do sklepów itp. – to urządzenia, które znamy i z których korzystamy. Dzięki automatyce możliwe było zrealizowanie odwiecznych marzeń człowieka – loty na Księżyc oraz w kierunku Marsa, Wenus i innych planet, zajrzenie w głębie morskie i czeluście wulkanów. Współcześni automatycy nie ustają w swoich poszukiwaniach i wspierani przez naukowców z innych dziedzin: elektroników, nanoelektroników (zajmujących się inżynierią operującą w skali nanometrów – miliardowych części metra!), chemików, biologów, mechaników tworzą nowe urządzenia i rozwijają nowe dziedziny naukowe: robotykę, mechatronikę, bionikę, domotykę.
, chemików, biologów, mechaników tworzą nowe urządzenia i rozwijają nowe dziedziny naukowe: robotykę, mechatronikę, bionikę, domotykę.")
9
Automatyka jest dziedziną wiedzy, która zajmuje się możliwościami wyeliminowania lub ograniczenia udziału człowieka w czynnościach związanych ze sterowaniem różnorodnymi procesami, głównie technologicznymi i przemysłowymi. Automatyka jest dziedziną nauki zajmująca się teorią i praktyczną realizacją urządzeń sterujących procesami, głównie technologicznymi i przemysłowymi. Automatyka zajmuje się analizą i modelowaniem matematycznym obiektów różnej natury (np. cieplnych, chemicznych, elektrycznych, mechanicznych, hydraulicznych, pneumatycznych). Stworzony model obiektu pozwala na zastosowanie teorii sterowania do stworzenia urządzenia zwanego regulatorem, (sterownikiem, kontrolerem) sterującego danym obiektem lub procesem tak, by ten zachowywał się w pożądany sposób. Na przestrzeni wielu lat w postępującym procesie automatyzacji w różnych dziedzinach techniki pojawiały się praktyczne rozwiązania układów regulujących samoczynnie (np. obroty maszyn czy ciśnienia w zbiornikach). Analizę zachowań tych układów traktowano jako część odpowiedniej dziedziny techniki (np. teorii maszyn czy pneumatyki), co sprawiało, że wiedza na temat regulacji była porozrzucana pośród różnych działów nauki. Automatyka organizuje cały ten dorobek, uogólniając go przy tym i upraszczając.
. Stworzony model obiektu pozwala na zastosowanie teorii sterowania do stworzenia urządzenia zwanego regulatorem, (sterownikiem, kontrolerem) sterującego danym obiektem lub procesem tak, by ten zachowywał się w pożądany sposób. Na przestrzeni wielu lat w postępującym procesie automatyzacji w różnych dziedzinach techniki pojawiały się praktyczne rozwiązania układów regulujących samoczynnie (np. obroty maszyn czy ciśnienia w zbiornikach). Analizę zachowań tych układów traktowano jako część odpowiedniej dziedziny techniki (np. teorii maszyn czy pneumatyki), co sprawiało, że wiedza na temat regulacji była porozrzucana pośród różnych działów nauki. Automatyka organizuje cały ten dorobek, uogólniając go przy tym i upraszczając.")
10
Automatyzacja to znaczne ograniczenie lub zastąpienie (proces zastępowania) ludzkiej pracy fizycznej i umysłowej przez pracę maszyn działających na zasadzie samoregulacji i wykonujących określone czynności bez udziału człowieka. Automatyzacja jest to technologia czyli działalność natury technicznej, ekonomicznej i organizacyjnej, mająca na celu wprowadzenie praw, metod i urządzeń automatyki w rozmaite dziedziny życia. Technologia – całokształt wiedzy dotyczącej konkretnej metody wytworzenia jakiegoś dobra lub uzyskania określonego efektu przemysłowego lub usługowego.

11
Modelowanie matematyczne to użycie języka matematyki do opisania zachowania jakiegoś obiektu (na przykład elektrycznego, mechanicznego, termodynamicznego, biologicznego, ekonomicznego). Praktyka inżynierska wymagająca sterowania obiektem związana jest z analizą jego zachowania, do czego używa się modelowania matematycznego. W analizie inżynier buduje model obiektu i na podstawie tego modelu może wnioskować co do wpływu potencjalnych zakłóceń na stan układu. W sterowaniu model może posłużyć do teoretycznego wypróbowania różnych strategii sterowania bez wpływania na rzeczywisty obiekt. Model matematyczny opisuje dany obiekt za pomocą zmiennych. Zmienne reprezentują pewne właściwości obiektu, na przykład zmierzone wartości wyjść obiektu. Właściwy model to grupa funkcji wiążących ze sobą różne zmienne i w ten sposób opisujących powiązania między wielkościami w obiekcie.

12
Sterowanie polega na takim oddziaływaniu na obiekt sterowania, za pomocą sygnałów wejściowych, aby jego sygnały wyjściowe osiągnęły pożądaną wartość. Sterowanie procesem technologicznym polega na oddziaływaniu na strumienie energii i materiałów w taki sposób, aby zapewnić zamierzony przebieg procesu. Sygnał to przebieg dowolnej mierzalnej wielkości zmieniającej się w czasie, generowanej przez zjawiska fizyczne lub systemy. Obiekt sterowania – każdy proces (np. napędzanie) lub zjawisko (np. przepływ cieczy), podlegające regulacji. Obiekt sterowania – zespół urządzeń, w których odbywa się proces podlegający sterowaniu. Przykładami obiektów są: silnik, pojazd kosmiczny, okręt, reaktor chemiczny, elektrownia, system energetyczny, zakład produkcyjny itp. Sterowanie może być realizowane przy pomocy człowieka - sterowanie ręczne lub za pomocą specjalnie skonstruowanego urządzenia (regulatora) - sterowanie automatyczne. Regulator - jeden z elementów składających się na układ regulacji (obwód regulacji). Zadanie regulatora polega na wygenerowaniu odpowiedniego sygnału sterującego, aby sygnał wyjściowy obiektu regulacji w jak najkrótszym czasie osiągał wartość zadaną.
 lub zjawisko (np. przepływ cieczy), podlegające regulacji. Obiekt sterowania – zespół urządzeń, w których odbywa się proces podlegający sterowaniu. Przykładami obiektów są: silnik, pojazd kosmiczny, okręt, reaktor chemiczny, elektrownia, system energetyczny, zakład produkcyjny itp. Sterowanie może być realizowane przy pomocy człowieka - sterowanie ręczne lub za pomocą specjalnie skonstruowanego urządzenia (regulatora) - sterowanie automatyczne. Regulator - jeden z elementów składających się na układ regulacji (obwód regulacji). Zadanie regulatora polega na wygenerowaniu odpowiedniego sygnału sterującego, aby sygnał wyjściowy obiektu regulacji w jak najkrótszym czasie osiągał wartość zadaną.")
14
Wartość zadana (ang. setpoint) – w układzie regulacji, wartość sygnału wejściowego, informująca regulator o pożądanej wartości sygnału wyjściowego. Dzięki znajomości wartości zadanej i wartości sygnału wyjściowego można wyznaczyć błąd regulacji (uchyb regulacji), w postaci różnicy tych sygnałów. Przykładem wartości zadanej jest temperatura ustawiana w termostacie. Niepożądane sygnały działające na obiekt nazywamy zakłóceniami. W takim przypadku stosuje się sterowanie odporne. Sterowanie może odbywać się w układzie otwartym lub zamkniętym. Sterowanie w układzie otwartym polega na takim nastawieniu wielkości wejściowej, aby znając charakterystykę obiektu i przewidując możliwość działania nań zakłóceń, otrzymać na wyjściu pożądaną wartość. Sterowanie w układzie zamkniętym różni się od sterowania w układzie otwartym tym, że regulator otrzymuje dodatkowo poprzez sprzężenie zwrotne informacje o stanie wielkości wyjściowej. Informacja ta podana w postaci np. napięcia do regulatora, jest używana do korygowania nastaw wielkości wejściowej obiektu. Sterowanie w układzie zamkniętym (regulacja automatyczna) polega na takim oddziaływaniu na obiekt sterowania aby jego sygnały wyjściowe osiągały wartość zadaną.
 polega na takim oddziaływaniu na obiekt sterowania aby jego sygnały wyjściowe osiągały wartość zadaną.")
15
Układ automatyki (regulacji) – zespół elementów biorących udział bezpośrednio w sterowaniu obiektem oraz elementów pomocniczych, który jest uporządkowany na zasadzie ich wzajemnej współpracy, tzn. zgodnie z kierunkiem przepływu sygnału. Sygnał może być opisany za pomocą funkcji zależnej od czasu. Ponieważ sygnał niesie informację o naturze badanych zjawisk lub systemów, w niektórych dziedzinach nauk jest on traktowany jak nośnik informacji. Sygnał oznacza zatem przepływ strumienia informacji.

16
Układ otwarty – układ, w którym sygnał wejściowy nie zależy od aktualnej wartości sygnału wyjściowego, ponieważ nie występuje sprzężenie zwrotne, a wynika jedynie z wewnętrznego stanu obiektu. Przebieg sygnału następuje tylko w jednym kierunku, od wejścia do wyjścia. Układ otwarty, jest uproszczonym układem sterowania w stosunku do układu automatycznej regulacji. Ponieważ nie istnieje możliwość tłumienia nieznanych zakłóceń oraz osiągnięcie wartości zadanej nie może być zweryfikowane, układ otwarty stosowany jest w przypadku prostych obiektów, dla których znany jest dokładny model matematyczny. W przypadku znanej wartości zakłócenia (np. temperatury na zewnątrz budynku, w którym znajduje się kocioł centralnego ogrzewania) układ otwarty może być użyty do jego kompensacji. Układ zamknięty – układ, w którym przebieg sygnału następuje w dwóch kierunkach. Od wejścia do wyjścia przebiega sygnał realizujący wzajemne oddziaływanie elementów, natomiast od wyjścia do wejścia przebiega sygnał sprzężenia zwrotnego.
 układ otwarty może być użyty do jego kompensacji. Układ zamknięty – układ, w którym przebieg sygnału następuje w dwóch kierunkach. Od wejścia do wyjścia przebiega sygnał realizujący wzajemne oddziaływanie elementów, natomiast od wyjścia do wejścia przebiega sygnał sprzężenia zwrotnego.")
17
Układ zamknięty z ujemnym sprzężeniem zwrotnym, zwany układem automatycznej regulacji, jest alternatywą do sterowania w układzie otwartym. Poprawia wskaźniki jakościowe procesu regulacji oraz lepiej sprawdza się w przypadku tłumienia nieznanych zakłóceń, których pojawienie się powoduje zmianę błędu regulacji, co skutkuje powstaniem odpowiedniego sygnału wejściowego obiektu (sygnału sterującego). Sprzężenie zwrotne (ang. feedback) - oddziaływanie sygnałów stanu końcowego (wyjściowego) procesu (systemu, układu), na jego sygnały referencyjne (wejściowe). Polega na otrzymywaniu przez układ informacji o własnym działaniu (o wartości wyjściowej). Sprzężenie zwrotne ujemne stanowi fundamentalny mechanizm samoregulacyjny. Ma ono za zadanie utrzymanie wartości sygnału wyjściowego układu regulacji na zadanym poziomie. Zachodzi ono wtedy, gdy jakiekolwiek zaburzenia powodujące odchylenie wartości tego sygnału w od zadanej wartości w którąkolwiek stronę powodują działania prowadzące do zmiany wartości sygnału w stronę przeciwną (stąd nazwa "ujemne"), a więc do kompensacji efektu tego odchylenia. Regulacja to sterowanie w układzie zamkniętym z ujemnym sprzężeniem zwrotnym tzn., że sygnały z wyjścia obiektu oddziałują na sygnały wejściowe układu.
 - oddziaływanie sygnałów stanu końcowego (wyjściowego) procesu (systemu, układu), na jego sygnały referencyjne (wejściowe). Polega na otrzymywaniu przez układ informacji o własnym działaniu (o wartości wyjściowej). Sprzężenie zwrotne ujemne stanowi fundamentalny mechanizm samoregulacyjny. Ma ono za zadanie utrzymanie wartości sygnału wyjściowego układu regulacji na zadanym poziomie. Zachodzi ono wtedy, gdy jakiekolwiek zaburzenia powodujące odchylenie wartości tego sygnału w od zadanej wartości w którąkolwiek stronę powodują działania prowadzące do zmiany wartości sygnału w stronę przeciwną (stąd nazwa ujemne ), a więc do kompensacji efektu tego odchylenia. Regulacja to sterowanie w układzie zamkniętym z ujemnym sprzężeniem. zwrotnym tzn., że sygnały z wyjścia obiektu oddziałują na sygnały wejściowe układu.")
18
Ogólny schemat blokowy układu regulacji automatycznej (układu zamkniętego).
Sygnały występujące w układzie regulacji jednej zmiennej to: w(t) sygnał zadany (wejściowy), określa zadanie sterowania, y(t) sygnał wyjściowy, zwany także sygnałem regulowanym, u(t) sygnał sterujący (nastawiającym) e(t) sygnał uchybu regulacji (w układzie z idealnym regulatorem uchyb powinien przyjmować wartość 0) z(t) sygnał zakłócający Regulator w układzie regulacji może być urządzeniem analogowym lub cyfrowym.
 sygnał zadany (wejściowy), określa zadanie sterowania, y(t) sygnał wyjściowy, zwany także sygnałem regulowanym, u(t) sygnał sterujący (nastawiającym) e(t) sygnał uchybu regulacji (w układzie z idealnym regulatorem uchyb powinien przyjmować wartość 0) z(t) sygnał zakłócający. Regulator w układzie regulacji może być urządzeniem analogowym lub cyfrowym.")
19
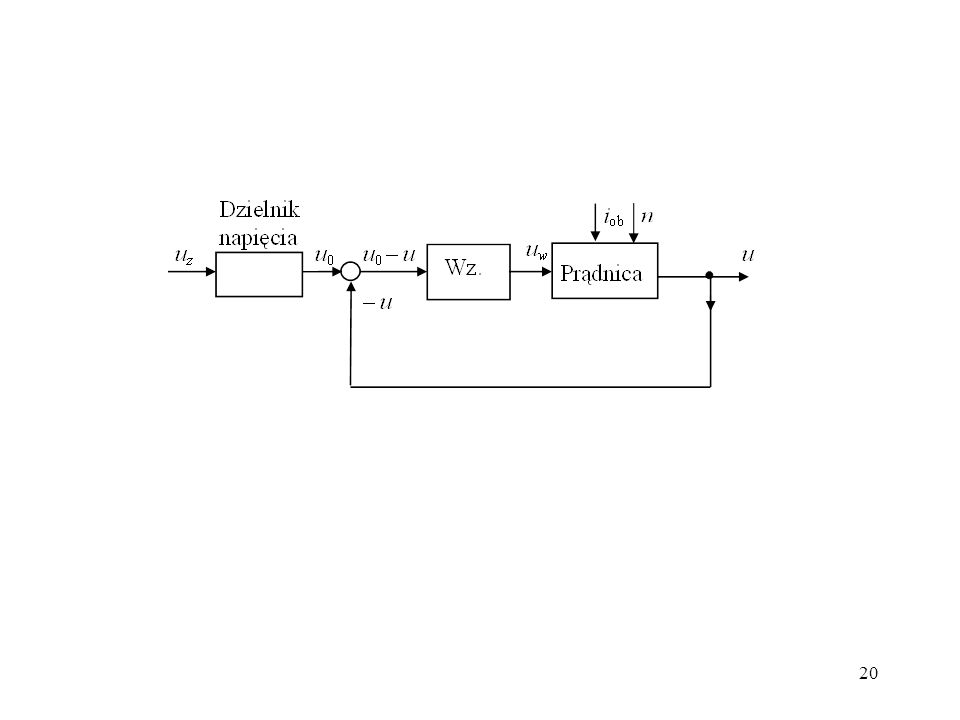
Przykłady układów regulacji.
Regulacja napięcia obcowzbudnego generatora prądu stałego przez zmianę strumienia magnetycznego G e = u0- u u u0 uw = ke uz _ + 1 = const i n 2 = const Robc u = kgn =1+ 2

21
Regulacja napięcia turbogeneratora prądu stałego przez zmianę dopływu pary
= const R Ciśnienie Temperatura z1 (Z2) Regulator odśrodkowy Turbina Zawór
 Regulator odśrodkowy. Turbina. Zawór.")
22
Schemat blokowy układu regulacji w ujęciu przemysłowym
e(t) + w(t) u(t) y(t) Regulator Obiekt regulacji _ z(t) Nastawnik Siłownik Czujnik Przetwornik Element pomiarowy Element wykonawczy y(t) - sygnał regulowany (wielkość regulowana), w(t) - sygnał zadany (wartość zadana) wielkości regulowanej, e(t) - sygnał błędu (uchybu) regulacji, u(t) - sygnał sterujący (sterowanie), z(t) - sygnał zakłócający (zakłócenie).
 + w(t) u(t) y(t) Regulator. Obiekt. regulacji. _. z(t) Nastawnik. Siłownik. Czujnik. Przetwornik. Element pomiarowy. Element wykonawczy. y(t) - sygnał regulowany (wielkość regulowana), w(t) - sygnał zadany (wartość zadana) wielkości regulowanej, e(t) - sygnał błędu (uchybu) regulacji, u(t) - sygnał sterujący (sterowanie), z(t) - sygnał zakłócający (zakłócenie).")
23
Schemat blokowy nowoczesnego układu regulacji w ujęciu przemysłowym
z(t) Schemat blokowy nowoczesnego układu regulacji w ujęciu przemysłowym y(t) Obiekt Element pomiarowy Element wykonawczy Wejście operatora Komputer C/A A/C Regulator (sterownik) Obiekt sterowania
 Schemat blokowy nowoczesnego układu regulacji w ujęciu przemysłowym. y(t) Obiekt. Element pomiarowy. Element wykonawczy. Wejście operatora. Komputer. C/A. A/C. Regulator (sterownik) Obiekt sterowania.")
24
Zagadnienie dotyczące układów regulacji mogą być rozpatrywane w zakresie:
analizy układów regulacji, syntezy układów regulacji. Analiza obejmuje badanie układów regulacji (regulatorów i obiektów) przy pomocy metod stosowanych do badania układów dynamicznych. Wynikiem analizy jest identyfikacja układów regulacji. Synteza to szereg kolejnych działań niezbędnych dla zaprojektowania układu regulacji. Działania te obejmują: opis matematyczny obiektu, opis zadania sterowania, czyli charakterystyki sygnału zadanego, opis zakłóceń, dobór wskaźników jakości regulacji, założenia dotyczące sygnałów układu regulacji i struktury regulatora. Wymagania stawiane układom automatycznej regulacji to: dokładność regulacji, stabilność regulacji, wymagania odnoszące się do wskaźników jakości regulacji.
 przy pomocy metod stosowanych do badania układów dynamicznych. Wynikiem analizy jest identyfikacja układów regulacji. Synteza to szereg kolejnych działań niezbędnych dla zaprojektowania układu regulacji. Działania te obejmują: opis matematyczny obiektu, opis zadania sterowania, czyli charakterystyki sygnału. zadanego, opis zakłóceń, dobór wskaźników jakości regulacji, założenia dotyczące sygnałów układu regulacji i struktury. regulatora. Wymagania stawiane układom automatycznej regulacji to: dokładność regulacji, stabilność regulacji, wymagania odnoszące się do wskaźników jakości regulacji.")
25
Control System Design Lecture Notes for ME 155A
Karl Johan Åström Department of Mechanical and Environmental Engineering University of California Santa Barbara © 2002 Karl Johan Åström

Podobne prezentacje