Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

2
Dane INFORMACYJNE Maszyny proste Nazwa szkoły:
Zespół Szkół Zawodowych w Gostyniu & Zespół Szkół Nr 2 w Szczecinie ID grupy: 97/81_MF_G1 & 97_21_mg_g1 Kompetencja: matematyczno - fizyczna Temat projektowy: Maszyny proste Semestr/rok szkolny: semestr letni 2010/2011

3
Z uwagi na problemy w komunikacji pomiędzy grupami efektem końcowym naszych grup są dwie odrębne prezentacje sklejone w jedną całość. Najpierw przedstawimy owoce grupy z Gostynia a następnie ze Szczecina

4
Wstęp Tematem wspólnego projektu naszych grup są maszyny proste. Urządzenia te są w powszechnym użyciu jednak rzadko zdajemy sobie sprawę, że używając takich czy innych przedmiotów posługujemy się właśnie maszynami prostymi. Pragniemy zaprezentować kilka przykładów maszyn wziętych z życia.

5
Spis treści Wprowadzenie Rodzaje maszyn prostych
Dźwignia jednostronna Dźwignia dwustronna Klin Krążki, wielokrążki i bloczki Kołowrót Równia pochyła Śruba Zadania z maszyn prostych Wnioski i przemyślenia Bibliografia

6
Wprowadzenie Maszyny proste znane są już od czasów antycznych. Słynne jest powiedzenie Artystotelesa „dajcie mi punkt podparcia i dostatecznie długą dźwignię a przesunę Ziemie”. Ten wielki uczony miał wtedy na myśli właśnie maszyny proste. Źródło obrazka:

7
wprowadzenie W swym założeniu maszyny proste miały pomagać człowiekowi w wykonywaniu pracy, tak by można ją było wykonać przy użyciu mniejszej siły. Należy przy tym pamiętać, że maszyny proste nie zmniejszają pracy ( przecież działa zasada zachowania energii mechanicznej) pozwalają jedynie na zmniejszenie siły ale zmuszają do działania na znacznie dłużej drodze.
 pozwalają jedynie na zmniejszenie siły ale zmuszają do działania na znacznie dłużej drodze.")
8
Rodzaje maszyn prostych – dźwignia jednostronna
Dźwignia jednostronna – może nią być belka lub pręt podparty z jednej ze stron tak jak na rysunku poniżej Równanie dla dźwigni jednostronnej - długość całe ramie dźwigni [m] - długość 1-szej części ramienia dźwigni [m] - siła działająca całe ramienia dźwigni N] Źródło obrazka: - siła działająca na 1-szą część ramienia [N]

9
Rodzaje maszyn prostych – dźwignia jednostronna
Przykłady w życiu codziennym taczka klamka hamulca w rowerze dziadek do orzechów łom

10
Rodzaje maszyn prostych – dźwignia dwustronna
Dźwignia dwustronna – może nią być belka lub pręt podparty z gdzieś pośrodku tak jak na rysunku poniżej Równanie dla dźwigni dwustronnej - długość 1 ramienia dźwigni [m] - długość 2 ramienia dźwigni [m] - siła 1 działająca na ramię 1 [N] Źródło obrazka: - siła 2 działająca na ramię 2 [N]

11
Rodzaje maszyn prostych – dźwignia dwustronna
Przykłady w życiu codziennym huśtawka typu „konik” żuraw do studni nożyce do żywopłotu nożyce ogrodnicze Źródło obrazka:

12
Rodzaje maszyn prostych – Klin
Klin – to również maszyna choć bardzo prosta. Swoim kształtem przypomina trójkąt (najlepiej równoramienny). Równanie dla klinu - siła działająca na grzbiet klinu [N] - siły działająca na boki klinu [N] - kąt rozwarcia ścian klinu Źródło obrazka:
. Równanie dla klinu. - siła działająca na grzbiet klinu [N] - siły działająca na boki klinu [N] - kąt rozwarcia ścian klinu. Źródło obrazka:")
13
Rodzaje maszyn prostych – Klin
Przykłady w życiu codziennym siekiera kilof przecinak kliniki do układania paneli i płytek ceramicznych młotek Źródło obrazka:

14
Rodzaje maszyn prostych – blok nieruchomy
Blok nieruchomy – to swego rodzaju talerz z rowkiem po którym porusza się lina. Blok służy do zmiany kierunku liny, niestety odbywa się to przy niewielkiej stracie włożonej pracy. Pozwalają np. podnosić ciągnąc linę w dół zamiast do góry. Działa na zasadzie równej dźwigni dwustronnej. Równanie dla bloku - współczynnik tarcia - siła naciągu liny [N] gdzie: - promień łożyska [m] - promień bloku[m] - kąt między końcami liny Źródło obrazka:

15
Rodzaje maszyn prostych – blok nieruchomy
Przykłady w życiu codziennym blok budowlany bloki w urządzeniach do ćwiczeń bloki w dźwigach bloki dla alpinistów bloki do olinowania żagli Źródło obrazka:

16
Rodzaje maszyn prostych – blok ruchomy
Blok ruchomy – podobnie jak nieruchomy jest rodzajem talerz z rowkiem po którym porusza się lina. Różnica polega na wykorzystaniu siły. Działa na zasadzie równej dźwigni jednostronnej. Równanie dla bloku - siła poruszająca [N] - siła użyteczna [N] - sprawność, liczona podobnie jak dla bloku nieruchomego Źródło obrazka:

17
Rodzaje maszyn prostych – blok ruchomy
Przykłady w życiu codziennym bloki w urządzeniach do ćwiczeń dźwigi jachting Źródło obrazka: Źródło obrazka:

18
Rodzaje maszyn prostych – wielokrążki
Wielokrążki – to układ cięgien i krążków, dzięki czemu możemy znacząco zredukować siłę z jaką musimy działać aby podnieść dany ciężar. W takim przypadku każdy kolejny dołożony krążek redukuje siłę z jaką trzeba działać o połowę Równanie dla wielokrążka - siła poruszająca [N] - siła użyteczna [N] - sprawność, liczona podobnie jak dla bloku nieruchomego - Ilość krążków przesuwnych Źródło obrazka:

19
Rodzaje maszyn prostych – wielokrążki
Przykłady w życiu codziennym wyciągarki dźwigi olinowanie jachtów wielokrążki w urządzeniach do ćwiczeń Źródło obrazka: Źródło obrazka:

20
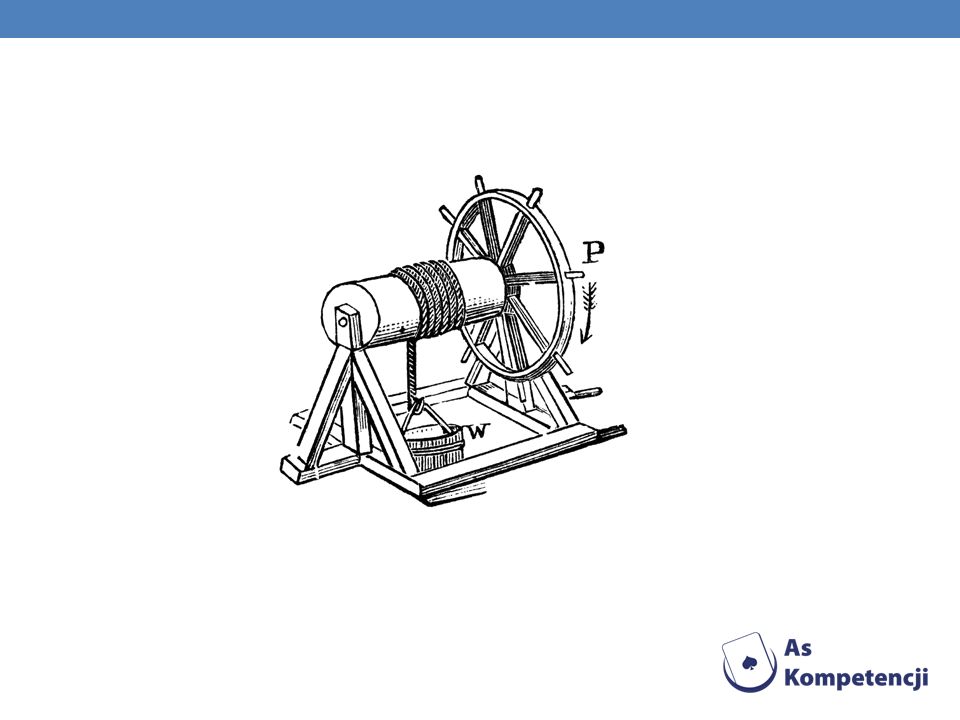
Rodzaje maszyn prostych – kołowrót
Kołowrót – to walec to którego została zamocowana korba, pozwala na wyciąganie ciężarów przy użyciu mniejszej siły. Równanie dla kołowrotu - siła poruszająca [N] - siła użyteczna [N] - promień walca na który nawijana jest lina[m] - długość ramienia korby[m] Źródło obrazka:

21
Rodzaje maszyn prostych – kołowrót
Przykłady w życiu codziennym studnie bramki bezpieczeństwa Źródło obrazka: Źródło obrazka:

22
Rodzaje maszyn prostych – równia pochyła
Równia pochyła – maszyna prosta działająca w oparciu o równię, pozwala na wyniesienie bardzo ciężkich ciał na spore wysokości. Równanie dla równi przy ruchu do góry - siła z jaką zsuwa się ciało [N] - ciężar ciała [N] - masa ciała [kg] - przyspieszenie grawitacyjne [ms-2] Źródło obrazka: - przyspieszenie z jakim zsuwa się ciało [ms-2]

23
Rodzaje maszyn prostych – równia pochyła
Przykłady w życiu codziennym podjazd rampa zjeżdżalnia dla dzieci skocznia Źródło obrazka: Źródło obrazka: Źródło obrazka:

24
Rodzaje maszyn prostych – śruba
Śruba – w założeniu jest to maszyna prosta, będąca nawiniętą na walec równią pochyłą. Równania dla śruby oraz - siła z jaką śruba jest wkręcana [N] - siła z jaką wkręca się śruba [N] - kąt nachylenia zwojów - średnica śruby [m] - skok gwintu [m]

25
Rodzaje maszyn prostych – śruba
Przykłady w życiu codziennym elementy konstrukcyjne (śruby i wkręty) dziadek do orzechów Źródło obrazka: Źródło obrazka: Źródło obrazka:
 dziadek do orzechów. Źródło obrazka: Źródło obrazka: Źródło obrazka:")
26
Zadania- coś z naszych zajęć
W jakiej odległości od Przemka siedzącego na końcu huśtawki powinien usiąść Robert o masie 60kg, żeby huśtawka była w równowadze ? Ciężar Przemka wynosi 400N, a długość huśtawki 210cm. Wybierz odpowiedź: R=1,75m R=1,05m R=0,45m R=1,50m Źródło obrazka: A.Bożek, K.Nessing: „Zadania z fizyki dla każdego” ZamKor, Kraków 2008

27
Zadania- coś z naszych zajęć
Jaką najmniejsza siłą musiałabyś zadziałać na ramie kołowrotu przedstawionego na rysunku, aby wyciągnąć ze studni wiadro z wodą o łącznej masie 16kg ? Ramię kołowrotu ma promień 50cm, natomiast średnica wałka to 0,3m. Wybierz odpowiedź: F1=64N F1=42N F1=56N F1=48N Źródło obrazka: A.Bożek, K.Nessing: „Zadania z fizyki dla każdego” ZamKor, Kraków 2008

28
Zadania- coś z naszych zajęć
Na rysunku poniżej znajduje się schemat dźwigni jednostronnej. Znając warunki równowagi dla dźwigni oblicz w jakiej odległości od punktu podparcia należy umieścić ciężar F1 Wybierz odpowiedź: r1=2m r1=0,25m r1=1m r1=0,5m Źródło obrazka: A.Bożek, K.Nessing: „Zadania z fizyki dla każdego” ZamKor, Kraków 2008

29
Jak mówili najstarsi z krasnali, którzy też narzędzi prostych używali…
…pracuj szybciej, wydajniej, od rana do wieczora

30
bibliografia P. Walczak, G.Wojewoda: „Fizyka i astronomia 2 kurs podstawowy” Operon, Gdynia red. J.Salach: „Fizyka dla szkół ponadgimnazjalnych kurs podstawowy” ZamKor, Kraków A.Bożek, K.Nessing: „Zadania z fizyki dla każdego” ZamKor, Kraków [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011] [stan na 22 czerwca 2011]

31
Druga część prezentacji

32
Maszyny proste

33
Maszyny proste w fizyce – idealizacje prostych rzeczywistych mechanizmów urządzeń mechanicznych wprowadzone w celu wyjaśnienia działania mechanizmów urządzeń ułatwiających wykonanie pewnych czynności (pracy) poprzez zmianę wartości lub kierunku działania siły wykonującej daną pracę. Maszyny proste określają wzajemną relację pomiędzy siłami poruszającymi a użytecznymi w stanie równowagi, W warunkach spoczynku, ruchu jednostajnego postępowego lub obrotowego przy zaniedbaniu sił tarcia i inercji układu.

34
OD KIEDY ZNAMY MASZYN PROSTE ?
Otóż były one znane już w starożytności. Już Arystoteles w swoich pracach opisywał takie urządzenia jak dźwignie i bloczki, a było to w IV w. p.n.e. Według pozostałych zapisów, także Archimedes znał te urządzenia. Wykorzystując dźwignie, bloczki i maszyny proste udało mu się zwodować jeden ze statków, którym był trójmasztowiec Syrakuzja.

35
Podział: Podstawowe maszyny proste to: obrotowe przesuwne dźwignia
kołowrót przekładnia (zębate, cierne, pasowe, łańcuchowe, śrubowe) blok (bloczek, krążek) bloczek przesuwny bloczek stały (krążek) blok wielokrążek przesuwne równia pochyła klin śruba
 blok (bloczek, krążek) bloczek przesuwny. bloczek stały (krążek) blok. wielokrążek. przesuwne. równia pochyła. klin. śruba.")
36
Obrotowe Dźwignie

37
Dźwignia dwustronna To belka lub pręt zawieszony lub podparty, na który po obu stronach osi obrotu działaj co najmniej jedna siła o zgodnych zwrotach. Schemat: , - ramiona dźwigni

38
Przykłady dźwigni dwustronnej
Nożyce Kombinerki Obcęgi Żuraw do czerpania wody ze studnii

39
Dźwignia jednostronna
To belka lub pręt podparty lub zawieszony, na którym po tej samej stronie osi obrotu działają co najmniej dwie siły o przeciwnych zwrotach.

40
Warunek równowagi dla dźwigni jednostronnej:
Dla dźwigni jednostronnej warunek równowagi (prawo równowagi) jest takie samo jak dla dźwigni dwustronnej, czyli:
 jest takie samo jak dla dźwigni dwustronnej, czyli:")
41
Przykład dźwigni jednostronnej
Dziadek do orzechów taczki

42
Podsumowując Dźwignia— jedna z maszyn prostych, których zadaniem jest uzyskanie działania większej siły przez zastosowanie siły mniejszej. Zbudowana jest ze sztywnej belki zawieszonej na osi. Dźwignia wchodzi w skład wielu mechanizmów, które również często nazywane są w skrócie dźwignią (np. dźwignia zmiany biegów, dźwignia hamulca, dźwignia wycieraczek, dźwignia przerzutki). W zależności od położenia osi względem działających sił rozróżnia się dźwignię dwustronną i jednostronną.
. W zależności od położenia osi względem działających sił rozróżnia się dźwignię dwustronną i jednostronną..")
43
Obrotowe kołowrót

44
Kołowrót Jednym z rodzajów maszyn prostych wykorzystywanych w życiu codziennym jest kołowrót, którego schemat jest przedstawiony poniżej: Warunek równowagi kołowrotu (taki sam jak przy powyższych maszynach prostych)
")
45
Kołowrót - walec o promieniu r z umocowaną na jego końcu korbą o ramieniu R. Na walec nawinięte jest cięgno, na koniec którego działa siła Q zwana siłą użyteczną, natomiast P jest siłą poruszającą. Jeżeli długość korby jest większa od promienia walca, kołowrót umożliwia podnoszenie ciężkiego ciała przy użyciu mniejszej siły.

46
: Jeśli chodzi o zysk na sile, jakiego może dostarczyć kołowrót, to wyraża się on poprzez: Oraz pod postacią wzoru :

47
Przykłady kołowrotów Kierownica w samochodzie Klamki w drzwiach
Pedał w rowerze Kurki przy zlewozmywaku

51
obrotowe przekładnia

52
Przekładnie rozróżnia się ze względu na Ilość stopni:
przekładnia jednostopniowa - w której współpracuje jedna para kół zębatych przekładnia wielostopniowa np. dwustopniowa, trzystopniowa itd. - w której szeregowo pracuje więcej par kół zębatych; przełożenie całkowite przekładni wielostopniowej jest iloczynem przełożeń poszczególnych stopni

53
ze względu na Umiejscowienie zazębienia
zazębienie zewnętrzne zazębienie wewnętrzne

54
Wzajemne usytuowanie osi obrotu:
Przekładnia czołowa - w której obie osie obrotu leżą w jednej płaszczyźnie. Takie przekładnie występują w dwóch odmianach: przekładnia walcowa przekładnia stożkowa Przekładnia śrubowa (zębata) - w której osie obrotu leżą w dwóch różnych płaszczyznach. Takie przekładnie występują w dwóch odmianach: przekładnia hiperboloidalna (o osiach zwichrowanych) przekładnia ślimakowa (o osiach prostopadłych)
 - w której osie obrotu leżą w dwóch różnych płaszczyznach. Takie przekładnie występują w dwóch odmianach: przekładnia hiperboloidalna (o osiach zwichrowanych) przekładnia ślimakowa (o osiach prostopadłych)")
55
Rodzaj przenoszonego ruchu:
Przekładnia obrotowa - uczestniczą w niej dwa koła zębate Przekładnia liniowa - koło zębate współpracuje z listwą zębatą tzw. zębatką. Ruch obrotowy zamieniany jest w posuwisty lub na odwrót

56
Przekładnia Mechanizm lub układ maszyn służący do przeniesienia ruchu z elementu czynnego (napędowego) na bierny (napędzany) z jednoczesną zmianą parametrów ruchu, czyli prędkości i siły lub momentu siły.
 na bierny (napędzany) z jednoczesną zmianą parametrów ruchu, czyli prędkości i siły lub momentu siły.")
58
obrotowe blok

59
Blok Element osprzętu wielu urządzeń dźwigowych, w postaci grubego talerza, wykonanego najczęściej z metalu osadzonego na łożyskach tocznych lub ślizgowych na osi. Na obwodzie krążka znajduje się rowek linowy zapobiegający ześlizgiwaniu się liny (lub łańcucha).
.")
60
Krążek przesuwny Krążek podparty swobodnie, przez który przeplata się cięgno. Krążek w trakcie przesuwania się cięgna obtacza się po nim z założenia bez poślizgu. Krążek przesuwny umożliwia zmianę wartości siły. P=Q/2

61
Krążek stały Krążek przytwierdzony do stałego podłoża, przez który przeplata się cięgno, które z założenia nie ślizga się po krążku, lecz wprawia go w ruch obrotowy. Krążek stały umożliwia tylko zmianę kierunku siły, bez zmiany jej wartości. P=Q P – siła poruszająca Q - siła użyteczna

62
Krążek linowy (koło linowe, blok, bloczek) – element osprzętu wielu urządzeń dźwigowych, w postaci grubego talerza, wykonanego najczęściej z metalu osadzonego na łożyskach tocznych lub ślizgowych na osi. Na obwodzie krążka znajduje się rowek linowy zapobiegający ześlizgiwaniu się liny (lub łańcucha).
..")
64
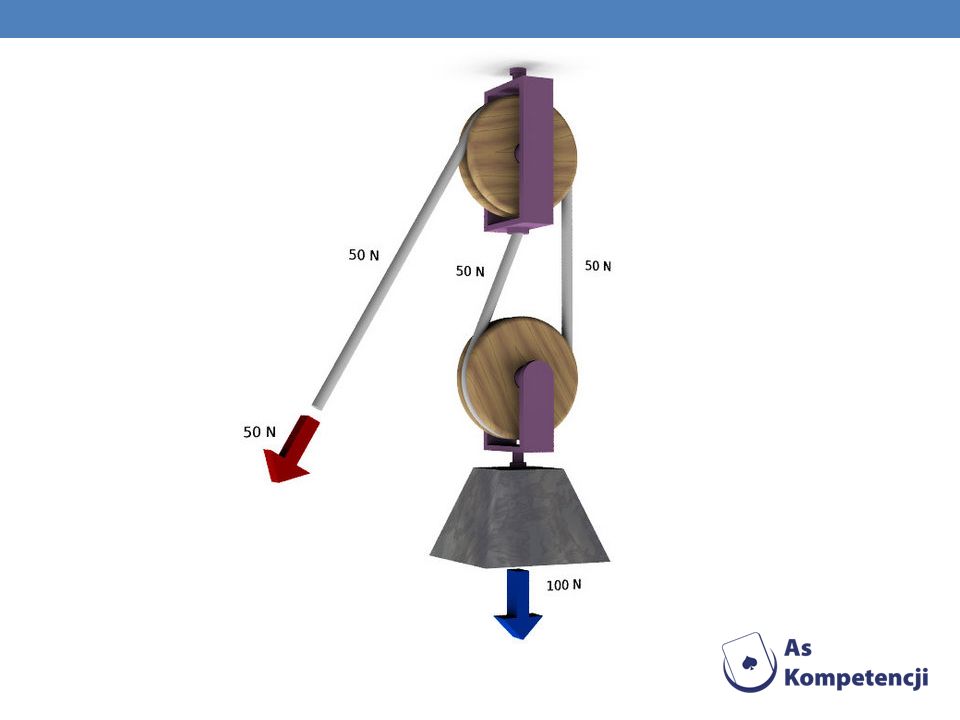
Wielokrążek (talia) – układ cięgien i krążków umożliwiający przełożenie siły, dzięki któremu można np. podnieść duży ciężar, działając mniejszą siłą.

65
Użycie więcej niż jednego krążka daje przełożenie siły, tak że mniejszą siłą można podnieść większy ciężar.

66
Wielokrążek potęgowy - maszyna prosta, składająca się z szeregowego ciągu krążków przesuwnych.

67
Wielokrążek różnicowy - rodzaj wielokrążka, w którym występuje krążek przesuwny, a krążek stały składa się z dwóch kół o różnych promieniach

69
Wielokrążek w dzisiejszych czasach.
Używane do podnoszenia albo ciągnięcia ciężarów w dowolnym kierunku. Są przeznaczone do użycia wszechstronnego. Wielokrążek ma zastosowanie wszędzie tam, gdzie trzeba podnieść duże ciężary przy użyciu małych silników lub ludzkich rąk: warsztaty mechaniczne, chale produkcyjne gdzie stosowany jest w zbloczach, narzędzia przenośne przy robotach montażowych, naprawczych oraz innych a także w żeglarstwie.

70
Przesówne Równia pochyła

71
Równia pochyła – jedna z maszyn prostych
Równia pochyła – jedna z maszyn prostych. Urządzenia, których działanie oparte jest na równi, były używane przez ludzkość od dawnych dziejów. Przykładem równi jest dowolna płaska pochylnia. Równia to płaska powierzchnia nachylona do poziomu pod pewnym kątem. Wyznaczanie parametrów ruchu ciała po tej powierzchni (przede wszystkim wyznaczenie przyspieszenia) nazywane jest zagadnieniem równi.
 nazywane jest zagadnieniem równi.")
72
Równia pochyła Równia pochyła jest to ciało sztywne, którego jedna powierzchnia stanowi płaszczyznę ustawioną pod pewnym kątem do kierunku działania siły (rys. poniżej). l h I – długość równi pochyłej h – wysokość równi pochyłej
. l. h. I – długość równi pochyłej. h – wysokość równi pochyłej.")
73
Warunek równowagi dla równi pochyłej
Wartość siły F utrzymującej ciało w równowadze na równi jest tyle razy mniejsza od wartości jego ciężaru G, ile razy wysokość równi h jest mniejsza od długości równi l.

74
Przykłady równi pochyłej:
Schody Podjazdy Skocznie narciarskie Jej odmianą są również kliny używane jako: siekiery, noże, igły, gwoździe.

75
przesuwne klin

76
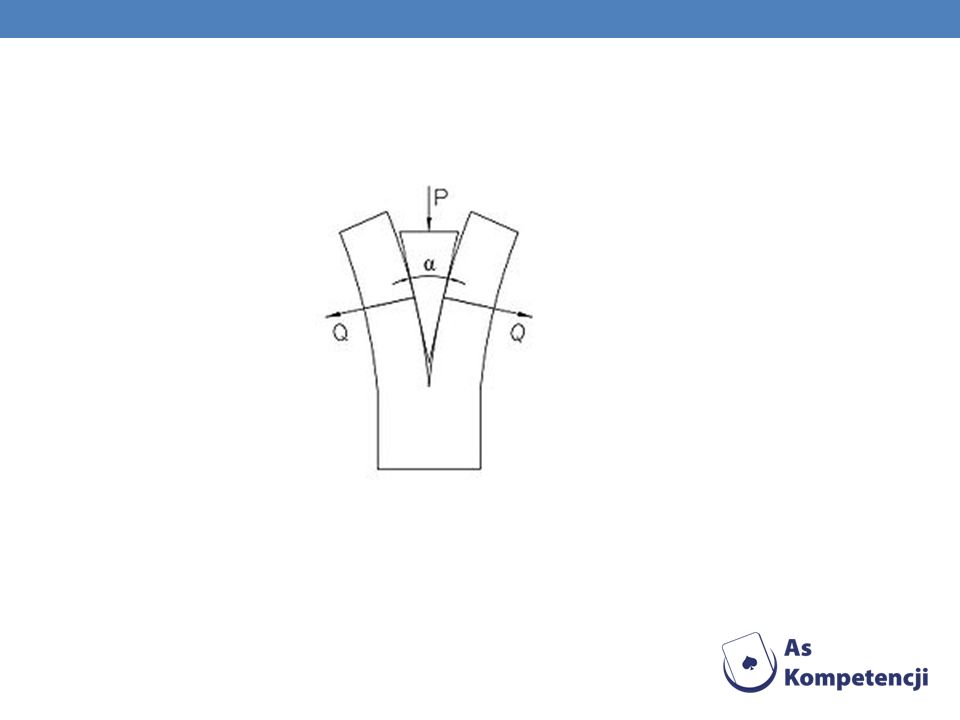
Klin – maszyna prosta w przekroju będąca trójkątem równoramiennym, którego ściany boczne ustawione pod niewielkim kątem α tworzące ostrze klina, rozpychają dany materiał działając na niego siłami Q. Na trzecią ścianę zwaną grzbietem klina działa siła poruszająca P.

77
KLIN Klin jest szczególnym wykorzystaniem równi pochyłej. Jest on wykorzystywany do rozdzielania silnie ze sobą połączonych powierzchni, lub wręcz do rozdzielania ciał na części (np. do rozszczepiania kawałków drewna). Klin jest bardzo efektywnym narzędziem, ponieważ może dostarczać bardzo dużego zysku na sile. Przekładnia klinu. Przekładnia klina, czyli zysk na sile wyraża się wzorem:
. Klin jest bardzo efektywnym narzędziem, ponieważ może dostarczać bardzo dużego zysku na sile. Przekładnia klinu. Przekładnia klina, czyli zysk na sile wyraża się wzorem:")
79
przesuwne śróba

80
Śruba - będąca elementem konstrukcyjnym (Śruba (złącze)) rozpatrywana jako maszyna prosta jest równią pochyłą nawiniętą na walec. Śruba scharakteryzowana jest przez jej średnicę (d) oraz skok gwintu (h).
 oraz skok gwintu (h).")
81
Dziękujemy

Podobne prezentacje
















>")


>")
>")



