Pobierz prezentację
1
Texture Based MRI Segmentation with a Two-Stage Hybrid Neural Classifier

2
Autorzy w swojej pracy proponują automatyczną metodę do pozyskiwania struktur anatomicznych w MRI opierając się na klasyfikacji tekstur. Metoda ta składa się z dwu etapów. Na początku tekstury MRI otrzymanego na wejściu są klasyfikowane przez sieć ASN(adaptive spline neurons)
.")
3
Otrzymanym wynikiem karmimy drugą sieć neuronową, której celem jest lepsze skontrastowanie struktury i eliminacja pomyłek pierwszej fazy poprzez lokalną analizę kształtów i tekstur i dokładnie zaplanowany proces uczenia.

4
Segregacja(segmentation) obrazu czyli podział jego pikseli na rozłączne regiony jest głównym celem komputerowego przetwarzania obrazu. Efektywna identyfikacja i nazwanie anatomicznych struktur w możliwie skomplikowanym MRI wydaje się być wyzwaniem, dając dużą ilość kształtów każdej anatomicznej struktury. Dostając obrazy o słabym kontraście i raczej słabej rozdzielczości, większa część zadań segregacji opiera się na informacji o kształcie.

5
Czasem używane jest klasyfikowanie tkanek jako pre-processing ułatwiający segregację. Jednak klasyfikator tkanek zwykle dzieli wejściowe voxele na 4 rodzaje(istota szara, istota biał, płyn mózgowo rdzeniowy i inne) niezależnie od struktury celu.
 niezależnie od struktury celu..")
6
Kiedy eksperci neurologii ręcznie określali te struktury używali oni tekstur aby poprowadzić podział. Przykładowo nawet jeśli fornix i corpus callosum składają się z istoty białej inne skierowanie włókien prowadziło do tego, że używali innych tekstur.

7
Praca ta problem wyodrębniania struktury anatomicznej opiera na użyciu informacji o teksturze. Etap pierwszy Używamy hybrydowego master classifier lub neuronowej architektury mixture of experts w połączeniu z adaptive spline neurons(ASN) aby zaklasyfikować tekstury wejściowego MRI. Początkowe wagi funkcji aktywacji ASN są obliczane przez podział a priori opisujący wybiórczość i odpowiedniość zbioru filtrów tekstur.
 aby zaklasyfikować tekstury wejściowego MRI. Początkowe wagi funkcji aktywacji ASN są obliczane przez podział a priori opisujący wybiórczość i odpowiedniość zbioru filtrów tekstur..")
8
Etap drugi Używamy teraz dużej sieci neuronowej aby dalej powiększyć kontrast wyniku i poprawić możliwe pomyłki pierwszego etapu. Ten osobny etap pozwala nam na zaprojektowanie zbioru uczącego skoncentrowanego na rozróżnieniu pomiędzy chcianymi teksturami a resztą.. Wykorzystuje to także większe otoczenie do tego aby podnieść jakość segregacji używając informacji o intensywności z pobliskich struktur.

9
O liczbie deskryptorów dla tekstur pisano już w literaturze. Jak każdy deskryptor ma swoje słabości i mocne strony, łączy je jednak poprawianie klasyfikacji. Będziemy używać linear discriminant analysis(LDA) aby ocenić dużą liczbę deskryptorów tekstur na bazie treningowej i pomóc wybrać tylko te najbardziej odpowiednie. Aby utworzyć bazę treningową dla każdej anatomicznej struktury, która miała zostać segmentowana połączyliśmy serię MR obrazów razem z ich ręcznie segmentowanymi obrazami. Użyliśmy następnie metody Wilksa aby znaleźć najskuteczniejsze z funkcji dyskryminacji(minimalizowanie wskaźnika lambda).
 aby ocenić dużą liczbę deskryptorów tekstur na bazie treningowej i pomóc wybrać tylko te najbardziej odpowiednie. Aby utworzyć bazę treningową dla każdej anatomicznej struktury, która miała zostać segmentowana połączyliśmy serię MR obrazów razem z ich ręcznie segmentowanymi obrazami. Użyliśmy następnie metody Wilksa aby znaleźć najskuteczniejsze z funkcji dyskryminacji(minimalizowanie wskaźnika lambda)..")
10
Przedstawię teraz krótki opis tych deskryptorów zanim przejdziemy do szczegółów jak je połączymy. co-occurences matrices discrete cosine transform filtry Gabora local Holder exponent

11
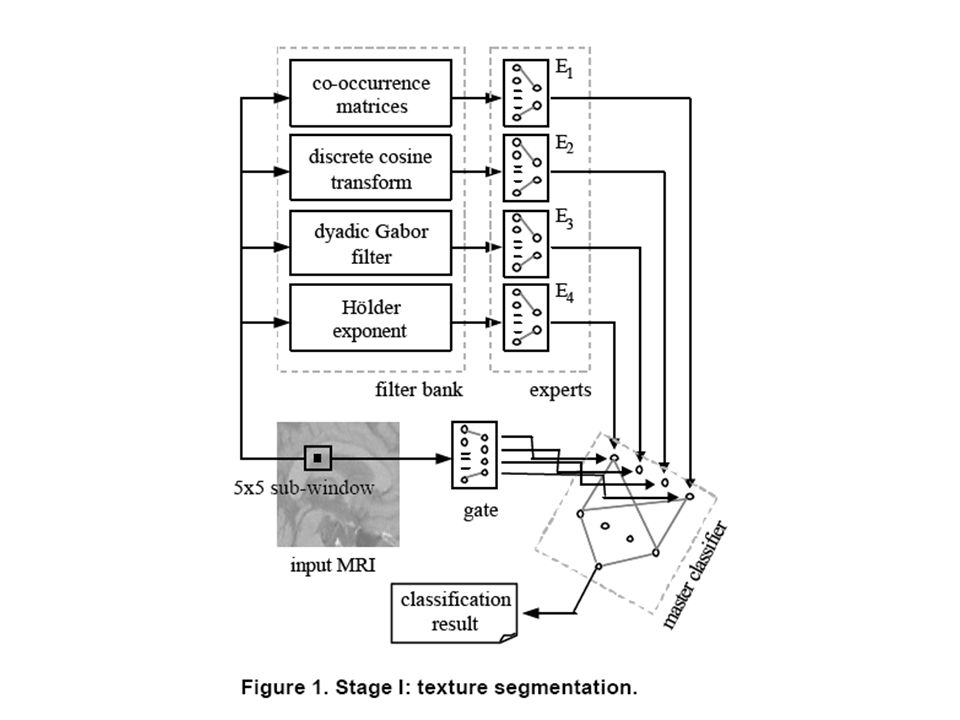
Hybrid master classifier / mixtures of experts architecture Dla każdego piksela wejściowego MRI rozważamy otaczające go okno 5x5 pikseli i normalizujemy intensywności przez odejmowanie tego centralnego piksela od pozostałych przed zastosowaniem różnych filtrów tekstur. Raz obliczone, cechy tekstur mogą być połączone na kilka sposobów:

12
1. mogą być skonkatenowane w jeden wektor a potem klasyfikowane wszystkie razem 2. Każda cecha może być klasyfikowana oddzielnie a wyniki potem połączone 3. Może być użyty master classifier do sklasyfikowania rezultatów kilku slave classifierów 4 Niezależny classifier decyduje który classifier zapewni końcowy wynik.

13
Mieszanki algorytmów ekspertowych mogą być używane do rozwiązania sprawy selekcji cech. Składają się z jakiejś liczby ekspertów, którzy otrzymują ten sam wektor cech i modułu decyzyjnego (the gate) z jednym wyjściem na eksperta. Teraz i-te wyjście bramy (the gate) reprezentuje pewny wybór i-tego eksperta.
 z jednym wyjściem na eksperta. Teraz i-te wyjście bramy (the gate) reprezentuje pewny wybór i-tego eksperta..")
14
Będzie teraz użyta architektura sieci neuronowych, która łączy architekturę mieszanki algorytmów ekspertowych i master classifier(rys 1). Autorzy proponują sieć składającą się z N=4 sieci ekspertowych, gate G która otrzymuje wejście bezpośrednio z MRI i master classifier w formie 2 warstwowego perceptronu feed forward(MLP). Jako liczbę wyjść każdego filtru tekstur używamy tej samej liczby neuronów w warstwie ukrytej każdego eksperta aby znormalizować wektor cech.
. Jako liczbę wyjść każdego filtru tekstur używamy tej samej liczby neuronów w warstwie ukrytej każdego eksperta aby znormalizować wektor cech..")
16
Aby wziąć to co najlepsze z obu architektur używamy ASN(adaptive spline neurons) zamiast standardowych(sigmoid activated) do warstwy wejściowej sieci master classifier.
 zamiast standardowych(sigmoid activated) do warstwy wejściowej sieci master classifier.")
17
Proces uczenia. Dla każdej struktury anatomicznej do segmentowania zbiór uczący składa Się z serii MR image razem z ręcznymi rysunkami struktur. Wybierzemy losowe punkty w rysunkach i upewniamy się, że liczba punktów należących do docelowej struktury jest mniej więcej taka sama jak punktów do niej nie należących.

18
Proces uczenia składa się z 3 faz: Zastępujemy master classifier przez 2 etapową mieszankę ekspertów. Wtedy trenujemy sieć.używając zmodyfikowanej wersji algorytmu EM (expectation maximization). Master classifier z ASN jest trenowany by limitować zachowanie 2-etapowej mieszanki ekspertów gdy otrzymuje wejście z sieci ekspertowej i bramy. Cała sieć jest ponownie trenowana przez algorytm gradientowy (używamy współczynnika uczenia u, gdzie u jest małe dla ekspertów i bramy a duże dla master classifier)
. Master classifier z ASN jest trenowany by limitować zachowanie 2-etapowej mieszanki ekspertów gdy otrzymuje wejście z sieci ekspertowej i bramy. Cała sieć jest ponownie trenowana przez algorytm gradientowy (używamy współczynnika uczenia u, gdzie u jest małe dla ekspertów i bramy a duże dla master classifier).")
19
Faza 3 pozwala nam wyspecjalizować master classifiera z ASN( i dzięki temu poprawić działanie klasyfikacji) i ciągle poprawiać mieszankę ekspertów. Początkowe funkcje aktywacji i wagi ASN w fazie 2 są ustawione na odzwierciedlanie pewności a priori w odpowiadającym selektorze cech. Używamy wyników LDA do obliczenia pewności rozdzielania. Początkowa funkcja aktywacji przybiera formę funkcji sigmoidalnych i składa się z 11 punktów kontrolnych, a i b są obliczane z współczynników funkcji dyskryminacji znalezionych przez LDA.

20
B. Lokalna analiza tekstur/kształtów przez dużą sieć neuronową. Pierwszy etap klasyfikacji używa informacji o teksturze w wejściowym MRI w bardzo lokalny sposób: okno 5x5 jest używane do obliczenia cech tekstury a punkty są rozważane niezależnie od siebie. Dzięki temu potrzeba drugiej klasyfikacji, której celem jest 1.przeglądanie większego otoczenia każdego punktu i używanie pobliskich struktur aby pomóc w segmentacji. 2.Poprawienie możliwych pomyłek pierwszego etapu 3.Uporządkowanie kształt i tekstury wyjścia.

21
Multi scale architecture Autorzy używali dużej sieci neuronowej ze standardowymi neuronami sigmoidalnymi Większe podokno i dwie większe jego wersje (skala 1.5 i 3) poddajemy działaniu warstwy ukrytej. Zaadoptowano input connection pattern często używany w rozpoznawaniu mowy i znaków. Składa się on z 3 rozłącznych części, każdy z 9 neuronami. Pierwszy blok jest zwrócony ku pionowym paskom (każdy z 9 neuronów w tej warstwie ukrytej jest jest połączony z 9 neuronami w warstwie wejściowej) Analogicznie drugi blok. Trzeci jest zwrócony ku podregionom wejściowym 3x3.
 Analogicznie drugi blok. Trzeci jest zwrócony ku podregionom wejściowym 3x3..")
22
Te wyspecjalizowane grupy neuronów są odpowiedzialne za wykrywanie cech lokalnych i względnych pozycji pobliskich struktur. Bloki są ściśle połączone z drugą warstwą ukrytą (20 neuronów) połączoną z wyjściem
 połączoną z wyjściem.")
24
Learning process: Główny problem sieci neuronowych gdy używane są jako klasyfikatory leży w ich braku dobrej zdolności odrzucania: sieć neuronowa musi przypisać każdy wejściowy wektor cech do jakiejś klasy, nawet jeśli niektóre wektory mogą nie należeć do żadnej z wyuczonych klas. Podczas fazy nauki granice klasyfikacji konstruowane są w taki sposób, że mogą zależeć jedynie od przykładów w zbiorze uczącym. W naszym przypadku jest łatwo jest wybrać wzorce należące do zbioru tekstur anatomicznej struktury celu a trudniej dać reprezentanta zbioru nie należącego do niego.

25
Używając drugiej klasyfikacji tekstur możemy zaprojektować zbiór uczący leżący wzdłuż granicy klasyfikacji. Umieszczamy w zbiorze uczącym 90% punktów źle sklasyfikowanych z wyjścia etapu I i taką samą liczbę poprawnie zaklasyfikowanych wziętych z całego zbioru obrazów.

27
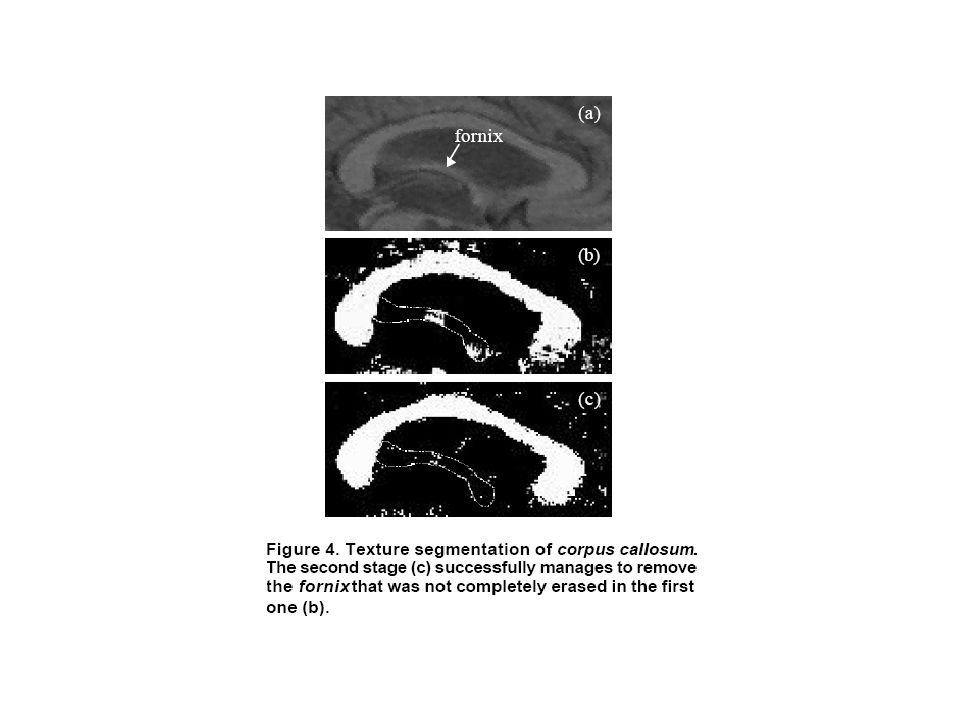
Rysunek 4 ilustruje jedną z rzeczy o które autorom chodzi. Na rysunku 4b fornix, który nie jest częścią corpus callosum, nie został w fazie pierwszej poprawnie usunięty ponieważ jego tekstura jest podobna do corpus callosum. Dopiero drugi etap usuwa fornix i dodatkowo wygładza kontury callosum.

28
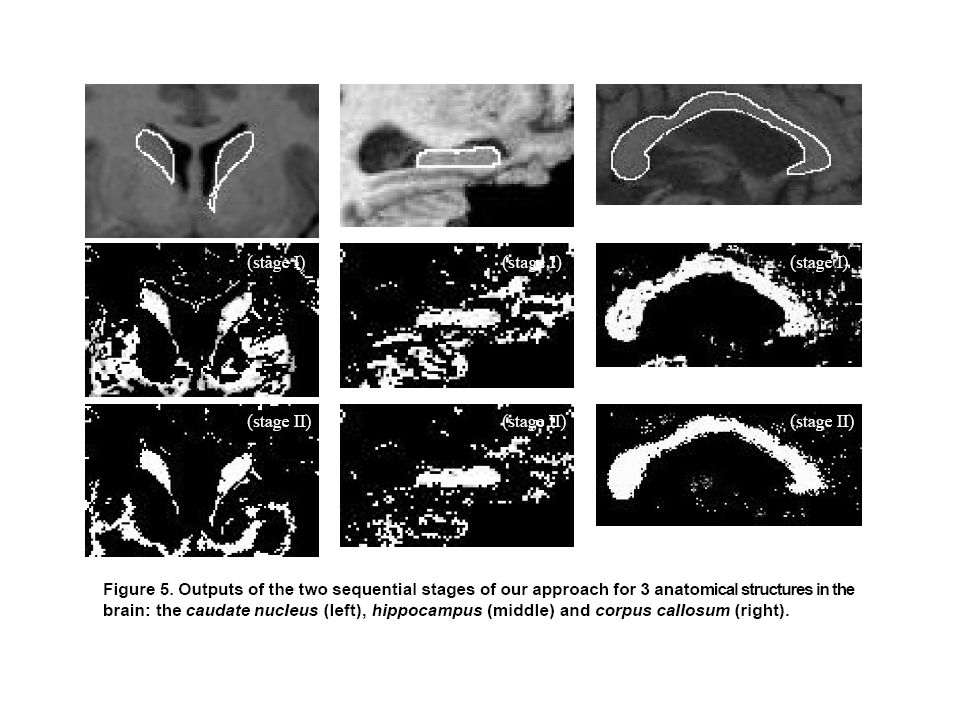
Results Najpierw algorytm zastosowany był do segmentacji corpus callosum, caudate nucleus i hippocampus w MRI. Dla każdej struktury zbiór uczący składał się z 5 zbiorów MRI mózgu wziętych od 5 osób.

29
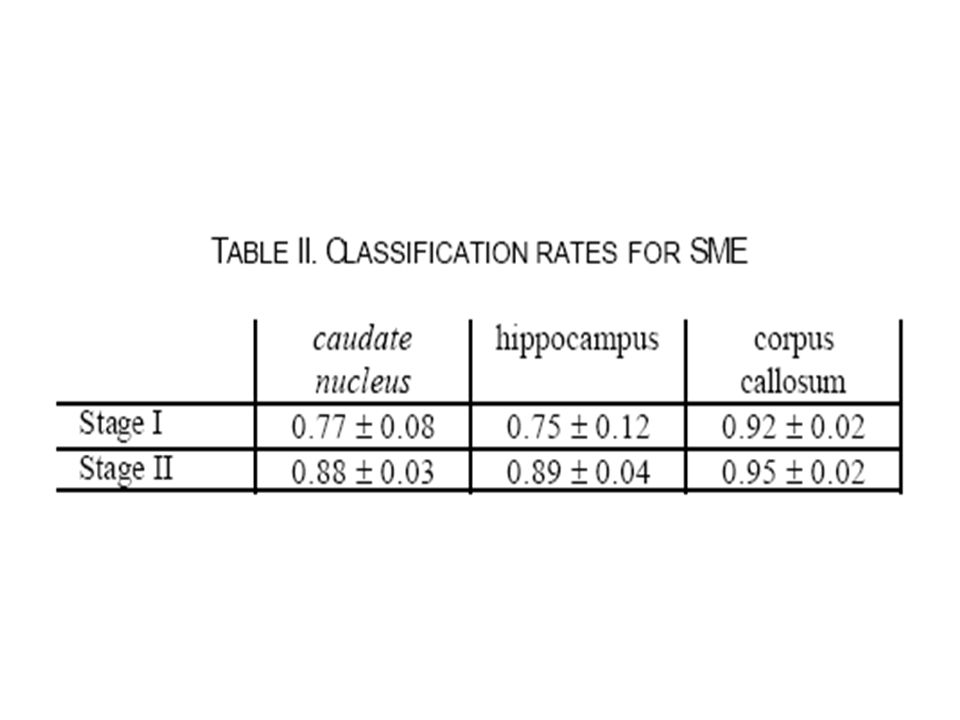
Na rysunku (rys 5) widzimy rezultaty każdego etapu dla trzech rysunków testowych. W tabeli mamy średnie stosunki poprawnie sklasyfikowanych pikseli do liczby wszystkich pikseli wyliczone dla 10 różnych przykładów testowych.

31
Następnie porównaliśmy architekturę hybrydową etapu pierwszego z wyspecjalizowaną mieszanką ekspertów(SME) bez master classifier. W tabeli mamy rezultaty każdego etapu. Jeśli porównamy otrzymane wyniki zobaczymy, że lepsze wyniki daje architektura hybrydowa.