Pobierz prezentację
1
Ogólne zadanie rachunku wyrównawczego

2
Ausgleichungsrechnung I
Gerhard Navratil

3
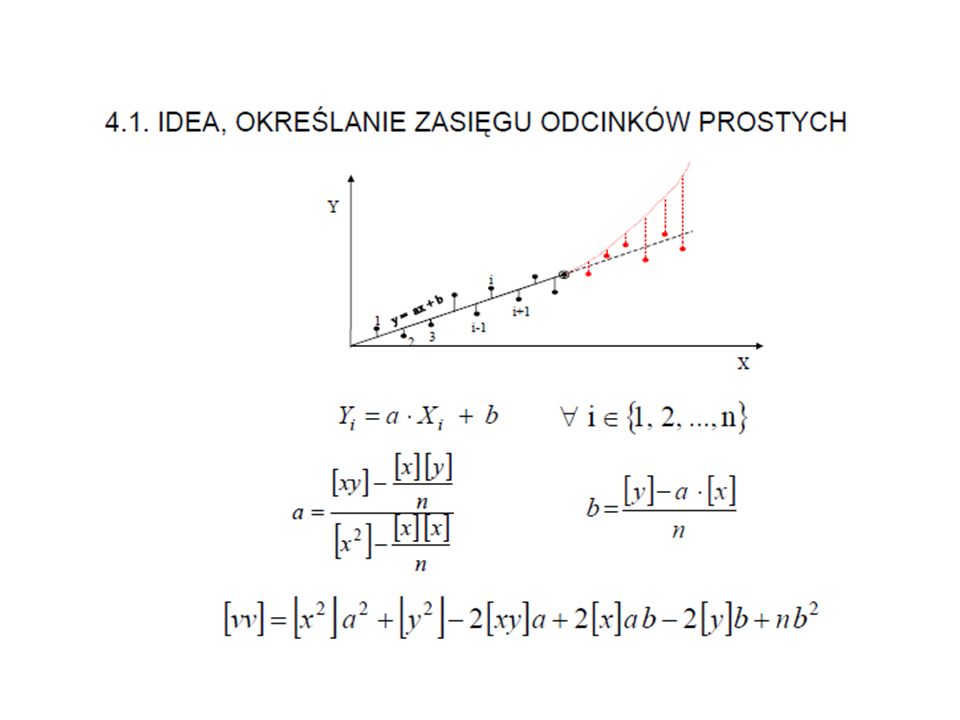
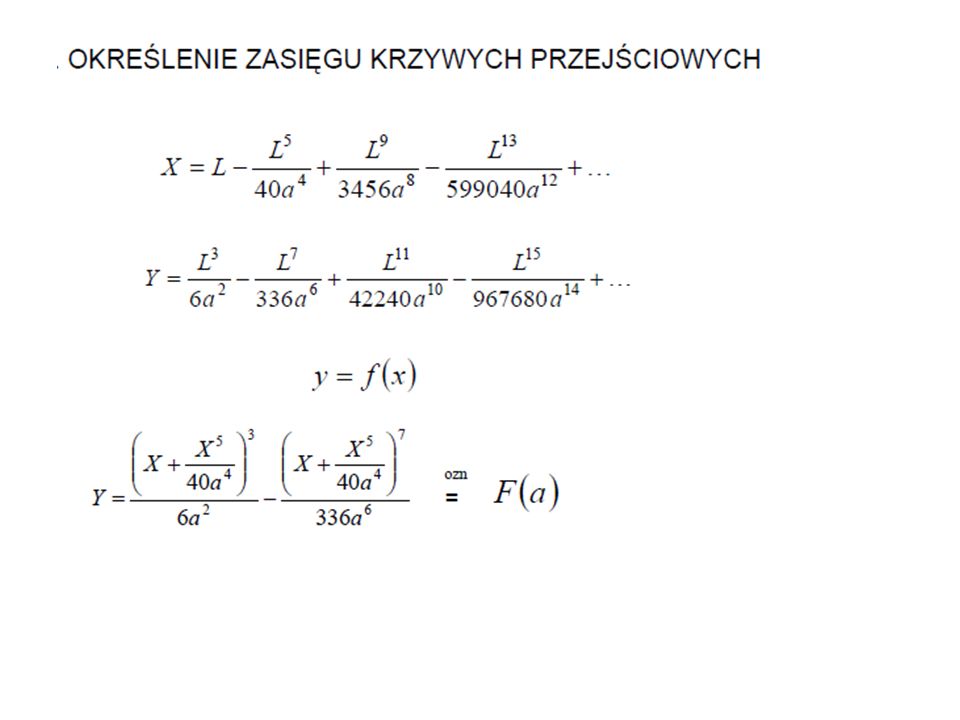
Przykład: Aproksymacja prostej(1)
10 Punktów danych Poszukiwane równanie prostej Ausgleichungsrechnung I Gerhard Navratil

4
Przykład: Aproksymacja prostej(2)
Założenie: Każdy punkt spełnia równanie prostej Ausgleichungsrechnung I Gerhard Navratil

5
Przykład: Aproksymacja prostej(3)
Wiecej równań niż niewiadomych brak jednoznacznego rozwiązania Każde dwa punkty określają jedno równanie prostej, jednak te równania są różne Zadanie: Określić jednoznaczne rozwiązanie Ausgleichungsrechnung I Gerhard Navratil

6
Ausgleichungsrechnung I
Prosta przez pierwszy i ostatni punkt Podział chmury punktów na dwie części, prosta przechodzi przez środek ciężkości Prosta określona przez średnie wartości współczynników k i d obliczone ze wszystkich możliwych prostych Prosta przechodzi przez jak największą liczbę punktów Które rozwiązanie przyjmiemy??? Ausgleichungsrechnung I Gerhard Navratil

7
Przykład: Aproksymacja prostej(6)
Ax=l+v v=Ax-l Dodatkowy warunek: Ausgleichungsrechnung I Gerhard Navratil

8
Ausgleichungsrechnung I
Błędy przypadkowe v Warunek: W zapisie macierzowym Wagi p są odwrotnie proporcjonalne do kwadratu błędu średniego Ausgleichungsrechnung I Gerhard Navratil

9
Ausgleichungsrechnung I
Model funkcyjny(1) n obserwacji L dla u niewiadomych X Określić wektor niewiadomych Wyniki pomiarów L1, … Ln są wartościami przybliżonymi wartości prawdziwych Otrzymujemy oszacowania prawdziwych wartości w postaci wyrównanych obserwacji: Ausgleichungsrechnung I Gerhard Navratil
 n obserwacji L dla u niewiadomych X. Określić wektor niewiadomych. Wyniki pomiarów L1, … Ln są wartościami przybliżonymi wartości prawdziwych. Otrzymujemy oszacowania prawdziwych wartości w postaci wyrównanych obserwacji: Ausgleichungsrechnung I. Gerhard Navratil.")
10
Model funkcyjny(2) Również wektor niewiadomych ma przybliżoną wartość
Wektor przybliżonych niewiadomych X0 Wektor poprawek niewiadomych x Zależności funkcyjne: r funkcji j1, … jr z parametrami L i X Ausgleichungsrechnung I Gerhard Navratil

11
Zależności Model funkcyjny Wektor odchyłek
Wektor wyrazów wolnych ‚pomierzone minus obliczone‘ Wektor wartości przybliżonych obserwacji Ausgleichungsrechnung I Gerhard Navratil

12
Model funkcyjny w postaci liniowej
Funkcje j1, … jr są dowolnego typu Założenie: x i v są małe w porównaniu do X0 i L Linearyzacja rozwinięcie w szereg Taylora Ausgleichungsrechnung I Gerhard Navratil

13
Ausgleichungsrechnung I
Macierze Jacobiego Macierz modelu funkcyjnegoA Macierz B Ausgleichungsrechnung I Gerhard Navratil

14
Model funkcyjny Ausgleichungsrechnung I Gerhard Navratil

15
Ausgleichungsrechnung I
Rozwiązanie ogólne (1) Rozwiązanie dla wartości minimalnej VTPV znajdujemy stosując funkcję Lagrange’a Obliczamy pochodne cząstkowe i przyrównujemy do 0. Ausgleichungsrechnung I Gerhard Navratil
 Rozwiązanie dla wartości minimalnej VTPV znajdujemy stosując funkcję Lagrange’a. Obliczamy pochodne cząstkowe i przyrównujemy do 0. Ausgleichungsrechnung I. Gerhard Navratil.")
16
Rozwiązanie ogólne(2) Pochodna względem v: Przyrównanie do zera:
Ausgleichungsrechnung I Gerhard Navratil

17
Rozwiązanie ogólne(3) Pochodne względem x przyrównane do 0:
Ausgleichungsrechnung I Gerhard Navratil

18
Rozwiązanie ogólne(4) Układ równań normalnych:
Rozwiązanie za pomocą odwrotności: Ogólne zadanie rachunku wyrównawczego Wyrównanie spostrzeżeń zawarunkowanych z niewiadomymi Ausgleichungsrechnung I Gerhard Navratil

19
Przypadki szczególne:
W każdym równaniu ji występuje tylko jedno spostrzeżenie: Wyrównanie spostrzeżeń pośredniczących W równaniach ji występują tylko pomiary, brak jest niewiadomych: Wyrównanie spostrzeżeń zawarunkowanych W równaniach występują zarówno pomiary jak i niewiadome powiązane warunkami: Wyrównanie spostrzeżeń pośrednich z warunkami. Ausgleichungsrechnung I Gerhard Navratil

20
Wyrównanie spostrzeżeń pośredniczących
W każdym równaniu występuje jeden pomiar i funkcja niewiadomych: n pomiarów, r=n równań, u niewiadomych Spostrzeżenia nadliczbowe: nfu=n-u Liczba stopni swobody (redundancja) Ausgleichungsrechnung I Gerhard Navratil
 Ausgleichungsrechnung I. Gerhard Navratil.")
21
Model funkcyjny Z szeregu Taylora: B= –I Macierz A jak poprzednio
Stąd: stąd Równania błędów Ausgleichungsrechnung I Gerhard Navratil

22
Rozwiązanie Układ równań upraszcza się: Otrzymujemy rozwiązanie
Macierz równań normalnych Poprawki spostrzeżeń: Wyrównane pomiary: Równania normalne Ausgleichungsrechnung I Gerhard Navratil

23
Dr hab. Inż. Waldemar Krupiński

32
Andrzej Borowiecki, Waldemar Krupiński
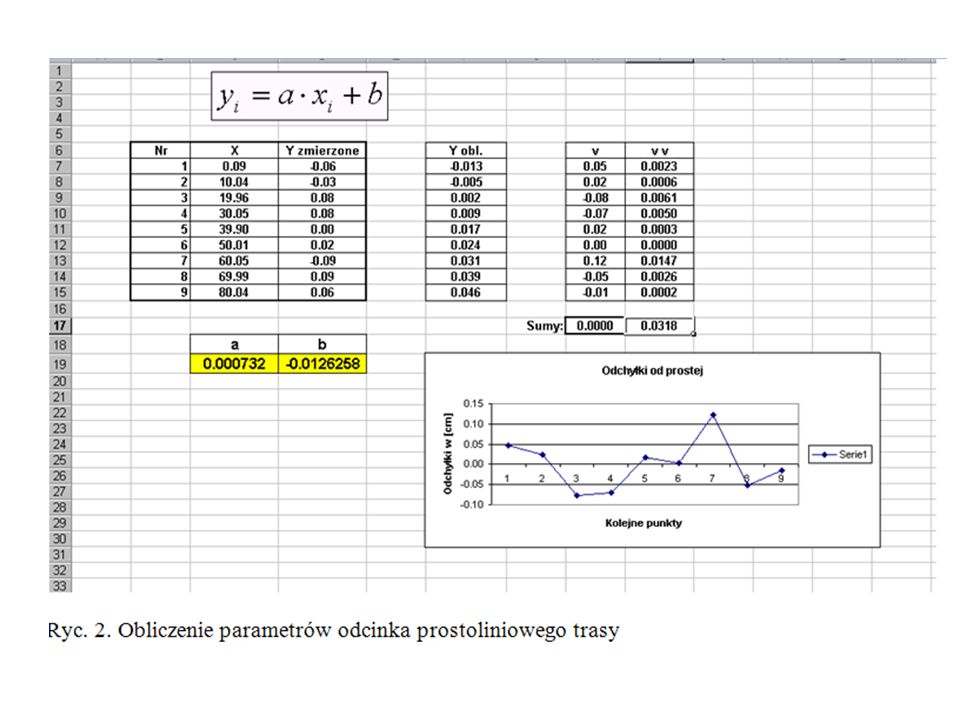
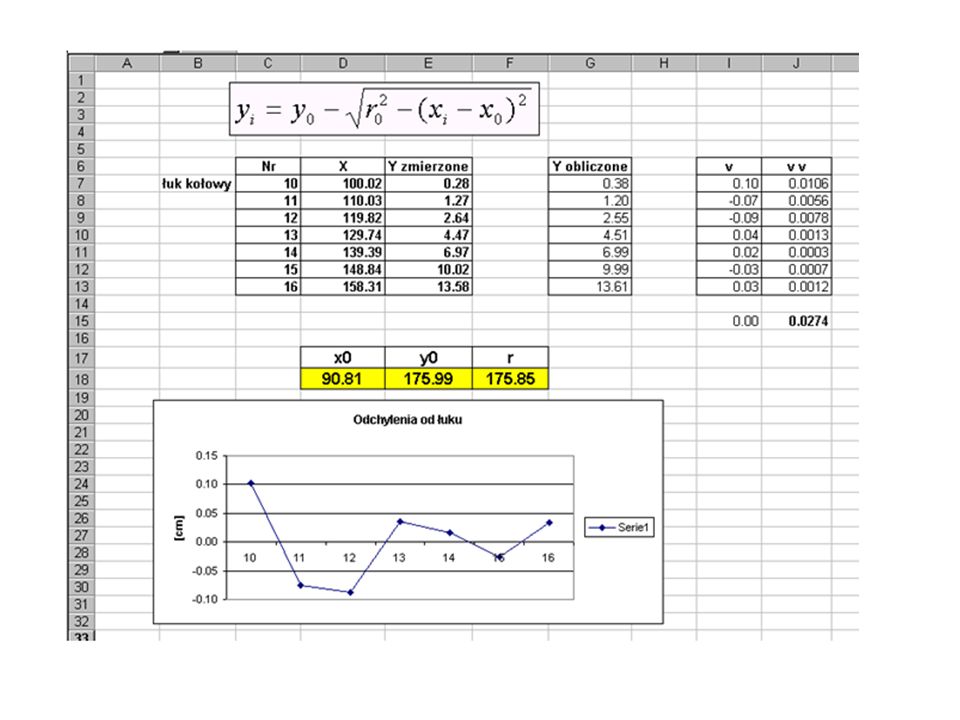
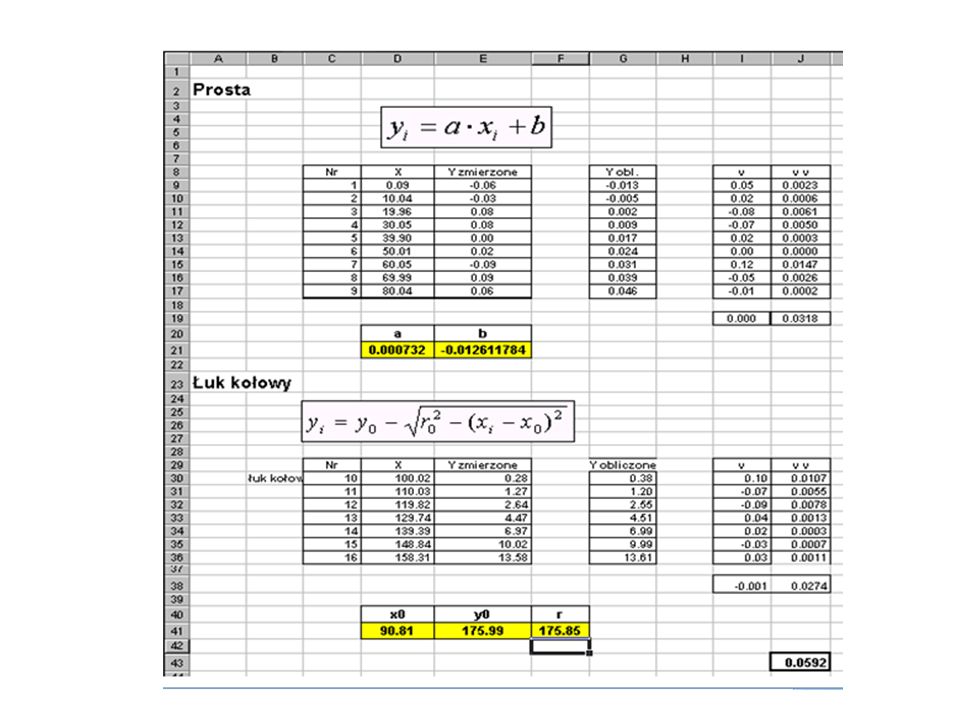
Akademia Rolnicza w Krakowie, Katedra Geodezji Numeryczne ustalanie parametrów linii prostej i łuku kołowego za pomocą dodatku SOLVER.

33
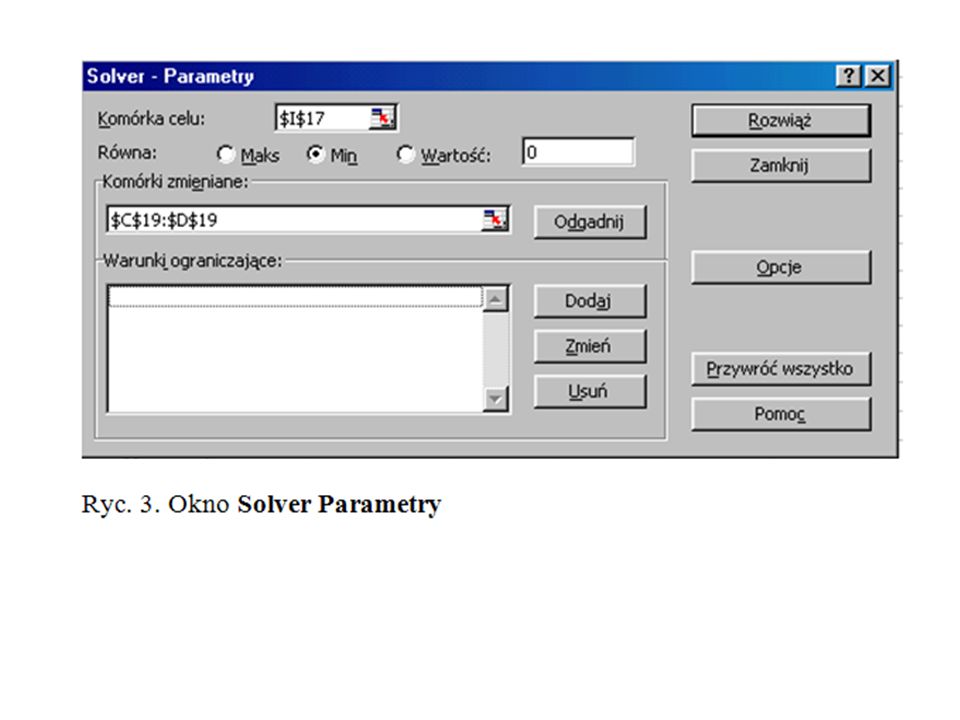
W pracy przedstawiono zastosowanie narzędzia SOLVER w arkuszu kalkulacyjnym EXCEL do wyznaczania parametrów prostej, łuku kołowego oraz współrzędnych punktu styczności obu elementów trasy, w oparciu o wyniki pomiarów terenowych tych obiektów.

34
Przykład Nr X Y 1 0.09 -0.06 2 10.04 -0.03 3 19.96 0.08 4 30.05 5 39.90 0.00 6 50.01 0.02 7 60.05 -0.09 8 69.99 prosta 9 80.04 0.06 łuk kołowy 10 100.02 0.28 11 110.03 1.27 12 119.82 2.64 13 129.74 4.47 14 139.39 6.97 15 148.84 10.02 16 158.31 13.58