Pobierz prezentację
1
Kinematyka zajmuje się ilościowym badaniem ruchu ciał z pominięciem czynników fizycznych wywołujących ten ruch. W mechanice technicznej rozważa się zagadnienia ruchu ciał z prędkościami bardzo małymi w porównaniu z prędkością światła. Na tej podstawie można stosować zasady klasycznej mechaniki wprowadzone przez Newtona. Zgodnie z tymi zasadami przestrzeń ma określoną metrykę; niezmienne jednostki odległości, niezależne od znajdujących się w przestrzeni ciał i stanu ruchu. Tak określona przestrzeń nosi nazwę przestrzeni Euklidesa Podobnie jak w statyce, również i w kinematyce ciała rzeczywiste zastępujemy dwoma modelami uproszczonymi: punktem materialnym oraz ciałem doskonale sztywnym. KINEMATYKA

2
Kinematyka punktu Torem punktu nazywamy linię ciągłą będącą miejscem geometrycznym kolejnych położeń punktu ruchomego w przestrzeni x y z x y z r r0r0 i j k M0M0 M

3
y x z x=f 1 (t) y=f 2 (t) z=f 3 (t) i j k M Jeżeli funkcje te są zmienne, to możemy dla dowolnej wartości czasu t określić położenie punktu M względem przyjętego układu odniesienia. Równania te nazywamy równaniami skończonymi ruchu punktu. Przedstawiają one parametryczne równania toru punktu (parametrem jest czas t) Kinematyka punktu
 Kinematyka punktu.")
4
x y z i j k M l s(t) M0M0 Przez wyrugowanie z tych równań parametru t otrzymujemy dwa równania opisujące tor punktu (trajektorię) jako krzywą po której punkt M porusza się, powstałą z przecięcia się dwóch powierzchni. Kinematyka punktu W celu określenia położenia punktu M w przestrzeni należy podać współrzędną s zmierzoną wzdłuż jego toru od nieruchomego punktu M 0. Współrzędną s nazywamy współrzędna łukowa – długość łuku MM 0

5
Kinematyka punktu x y z i j k M l s(t) M0M0 Równanie ruchu punktu po torze Droga przebyta przez punkt w przedziale czasu (0,t) Opis położenia punktu w przestrzeni za pomocą współrzędnej łukowej:
 M0M0 Równanie ruchu punktu po torze Droga przebyta przez punkt w przedziale czasu (0,t) Opis położenia punktu w przestrzeni za pomocą współrzędnej łukowej:")
6
M x y r l = 0 Opis położenia punktu na płaszczyźnie za pomocą współrzędnej biegunowej. promień wodzący oś biegunowa Kinematyka punktu

7
x y z i j k M l r Opis położenia punktu w przestrzeni za pomocą współrzędnych biegunowych.

8
x y z i j k M l Kinematyka punktu Opis położenia punktu w przestrzeni za pomocą współrzędnych walcowych. z y x

9
Prędkość i przyspieszenie M1M1 M2M2 l 0 Wektorem prędkości średniej nazywamy stosunek przyrostu r promienia- wektora w dwóch położeniach od czasu t potrzebnego na przejście z pierwszego położenia w drugie.

10
M1M1 M2M2 l Wektor prędkości średniej ma kierunek cięciwy, a jego wartość jest fizycznie mierzalna Prędkość średnia zależy nie tylko od ruchu punktu, ale i od wyboru punktów na torze Zależność od wyboru punktów można usunąć przez wprowadzenie wektora prędkości chwilowej

11
Wektorem prędkości chwilowej punktu M nazywamy granicę, do której zmierza wektor prędkości średniej, gdy przyrost czasu dąży do zera M Z formuły tej wynika, że wektor prędkości chwilowej punktu jest pochodną względem czasu promienia wektora r(t) tego punktu Wektor prędkości chwilowej jest wektorem stycznym do toru
 tego punktu Wektor prędkości chwilowej jest wektorem stycznym do toru")
12
M1M1 M2M2 vv a średnie v1v1 v2v2 v2v2 l Wektorem przyspieszenia średniego punktu M nazywamy stosunek przyrostu wektora prędkości do przyrostu czasu Przyspieszenie średnie ma kierunek przyrostu v, przy czym jego wartość i kierunek zależą od przedziału czasu, w którym je wyznaczamy

13
v1v1 v2v2 a a średnie N1N1 N2N2 vv 0101 Wektorem przyspieszenia chwilowego punktu M nazywamy granicę do której dąży wektor przyspieszenia średniego, gdy przyrost czasu dąży do zera h Z zależności tej wynika, że wektor przyspieszenia chwilowego jest równy pochodnej geometrycznej względem czasu wektora prędkości chwilowej i jest skierowany wzdłuż stycznej do hodografu prędkości v

14
M1M1 M2M2 tor M1M1 M2M2 hodograf Prędkość jest styczna do toruWektor przyspieszenia jest styczny do hodografu Hodograf – krzywa w przestrzeni prędkości, zakreślana przez koniec wektora prędkości Tor i hodograf

15
Ruch punktu materialnego ze względu na tor punktu (miejsce geometryczne jego położeń chwilowych) możemy podzielić na: - ruch prostoliniowy – jeżeli tor jest linia prostą lub - ruch krzywoliniowy – gdy tor jest linia krzywą Inny podział ruchów dotyczy wartości prędkości poruszającego się punktu. Ruch może być: - jednostajny – jeżeli w czasie trwania ruch wartość prędkości nie ulega zmianie, lub - zmienny – gdy wartość prędkości w każdej chwili jest inna (rośnie lub maleje w czasie)
.")
16
e RUCH PROSTOLINIOWY M0M0 M 0 l s(t)e 0 droga s – jest ściśle związana z czasem i wyraża się funkcja skalarną wersor stały, określający kierunek prostej
e 0 droga s – jest ściśle związana z czasem i wyraża się funkcja skalarną wersor stały, określający kierunek prostej")
17
Wektorowe równanie ruchu wzdłuż prostej l można zapisać: Na podstawie przedstawionych zależności, możemy stwierdzić, że wektory prędkości i przyspieszenia są kolinearne z prostą l Ruch jednostajny:

18
s t v t s1s1 s0s0 t1t1

19
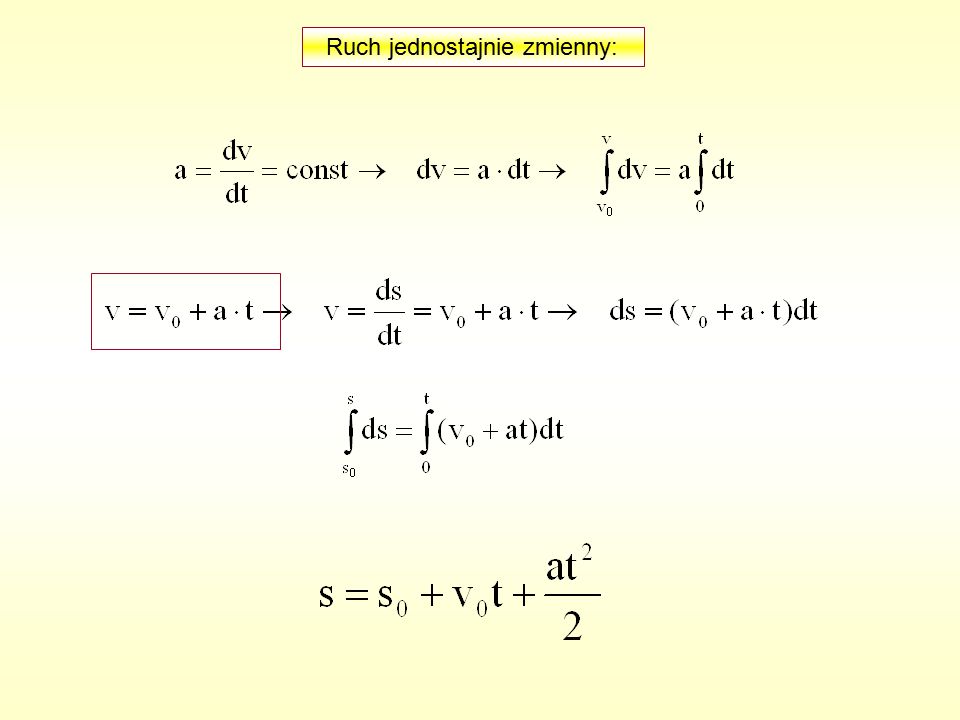
Ruch jednostajnie zmienny:

21
a t v t v0v0 s t s0s0 Ruch jednostajnie przyspieszony a >0 :

22
a t v t v0v0 s t s0s0

23
Przykład. Po przyjęciu w punkcie M początku toru napisać równania ruchu dla każdego punktu. Obliczyć czas t k, po upływie którego punkty te się spotkają oraz znaleźć drogi s’ 1 i s’ 2 przebycia punktów w tym czasie.

25
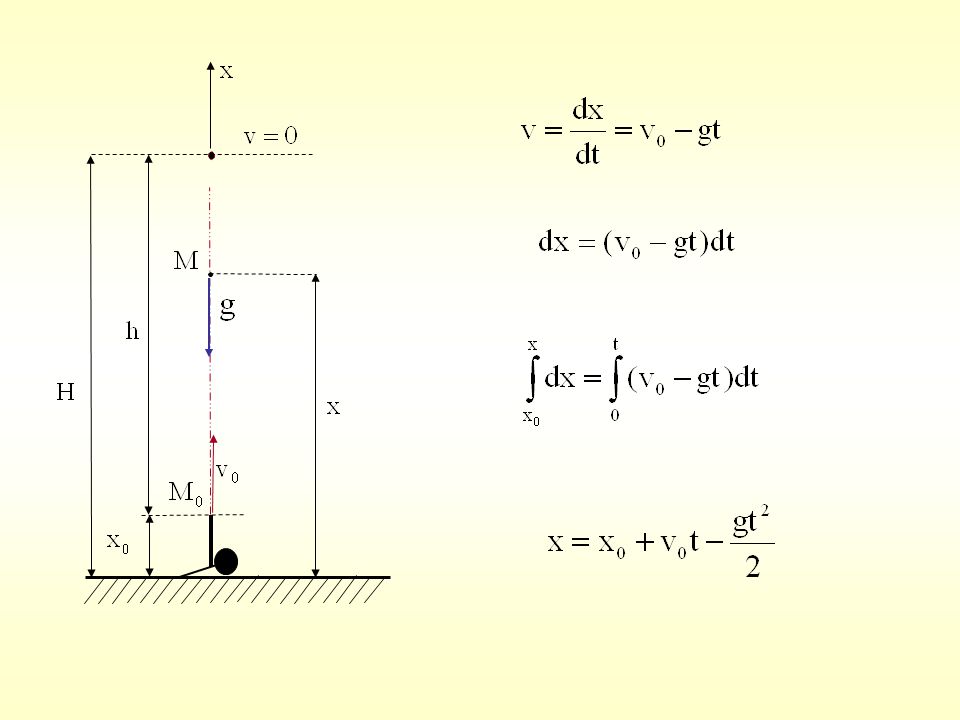
Przykład. Zakładając, że ruch pocisku odbywa się w próżni, obliczyć: - czas wznoszenia pocisku t 1,, - wysokość maksymalną H, - czas t 2, po którym pocisk spadnie do poziomu x 0 - prędkość v 2 jaką wówczas on uzyska

26
opóźnienie pocisku:

28
Czas wznoszenia t 1 pocisku obliczamy z warunku: Pocisk z malejącą prędkością wznosi się do wysokości:

29
Po czasie t 2 pocisk spadnie do poziomu x 0 i uzyska prędkość v 2 Czas wznoszenia t 1 jest równy czasowi opadania t 2 a prędkość opadania na poziomie x 0 równa się prędkości początkowej ze zwrotem przeciwnym

30
RUCH KRZYWOLINIOWY styczna tor normalna promień krzywizny krzywizna

31
Średnia krzywizną łuku MM 1 : Granicę, do której zmierza krzywizna średnia, gdy punkt M 1 dąży do punktu M ( s 0), nazywamy krzywizną toru w danym punkcie M czyli:
, nazywamy krzywizną toru w danym punkcie M czyli:")
32
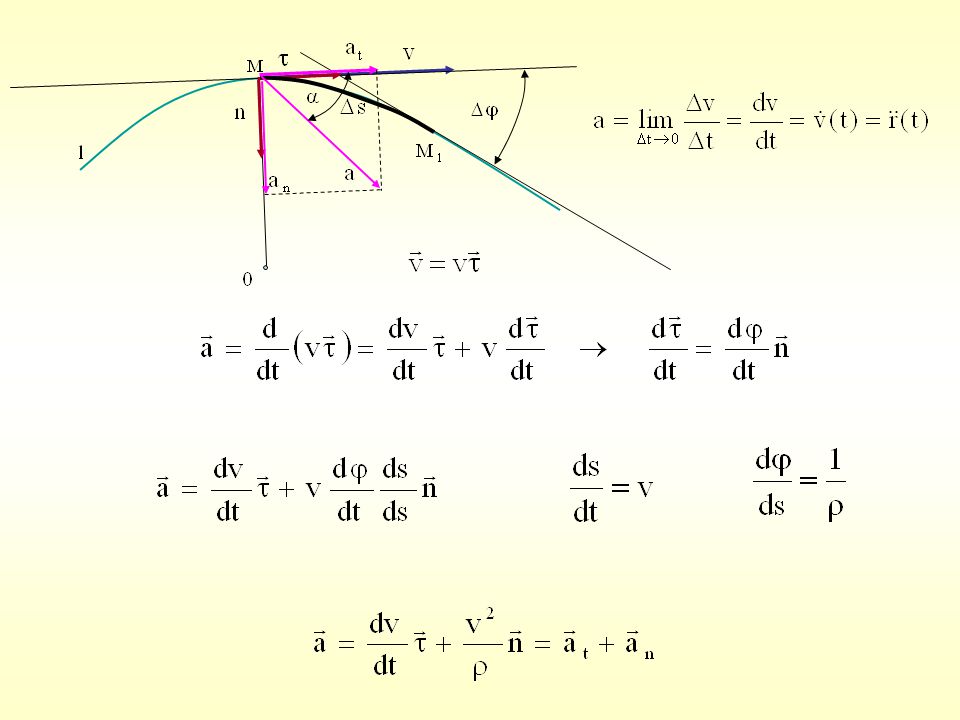
Przyspieszenie styczne i normalne w ruchu krzywoliniowym punktu na płaszczyźnie Wektor prędkości zmienia swój kierunek i wartość, występują wiec dwa rodzaje przyspieszenia, z których jedno a t powstaje na skutek zmiany wartości prędkości (modułu wektora), a drugie a n na skutek zmiany kierunku tor
, a drugie a n na skutek zmiany kierunku tor")
34
Przyspieszenie styczne a t jest składowa przyspieszenia całkowitego a w kierunku stycznym do toru i równa pochodnej względem czasu wartości liczbowej prędkości punktu Przyspieszenie normalne a n jest składową przyspieszenia całkowitego a w kierunku normalnym do toru i jest równe kwadratowi prędkości podzielonemu przez promień krzywizny

35
RUCH PUNKTU PO OKRĘGU

36
określa kierunek osi obrotu z Prędkość kątowa mająca wartość pochodnej względem czasu kąta obrotu , jest wektorem leżącym na osi obrotu.

37
Przyspieszenie kątowe Przyspieszenie kątowe równe co do wartości pochodnej względem czasu prędkości kątowej albo drugiej pochodnej względem czasu kąta obrotu , jest wektorem leżącym na osi obrotu. Jeżeli =const, to =0, natomiast w chwili rozruchu mamy =0, ale ≠ 0

38
Prędkość i przyspieszenie punktu we współrzędnych prostokątnych x z i j k M l z y x y

39
x z i j k M l z x y y

40
x z i j k M l z x y y Prędkość i przyspieszenie punktu we współrzędnych prostokątnych na płaszczyźnie

41
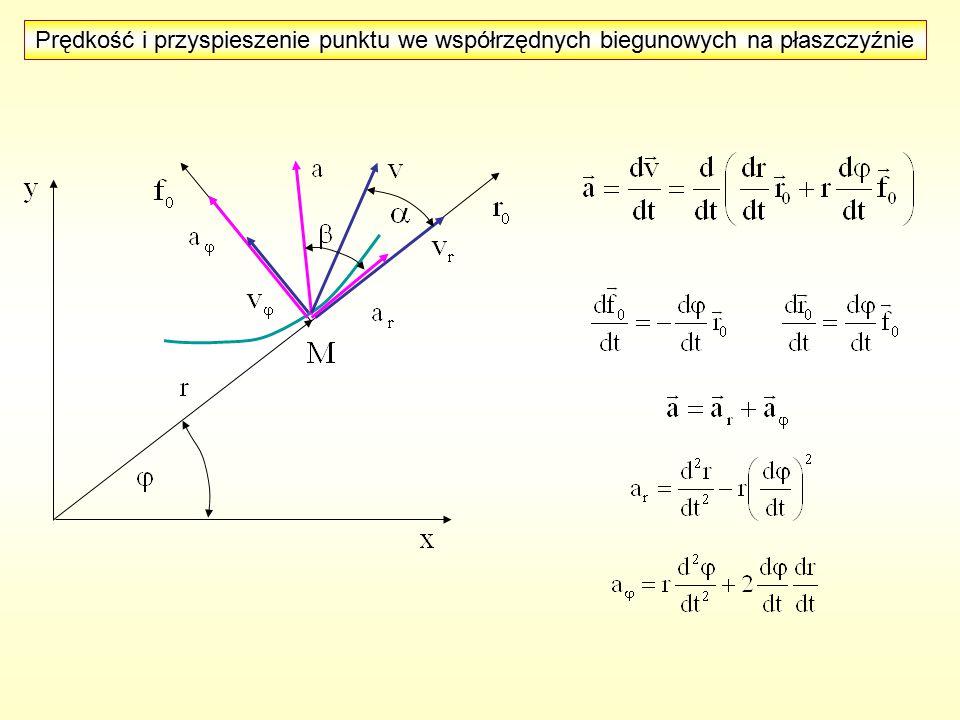
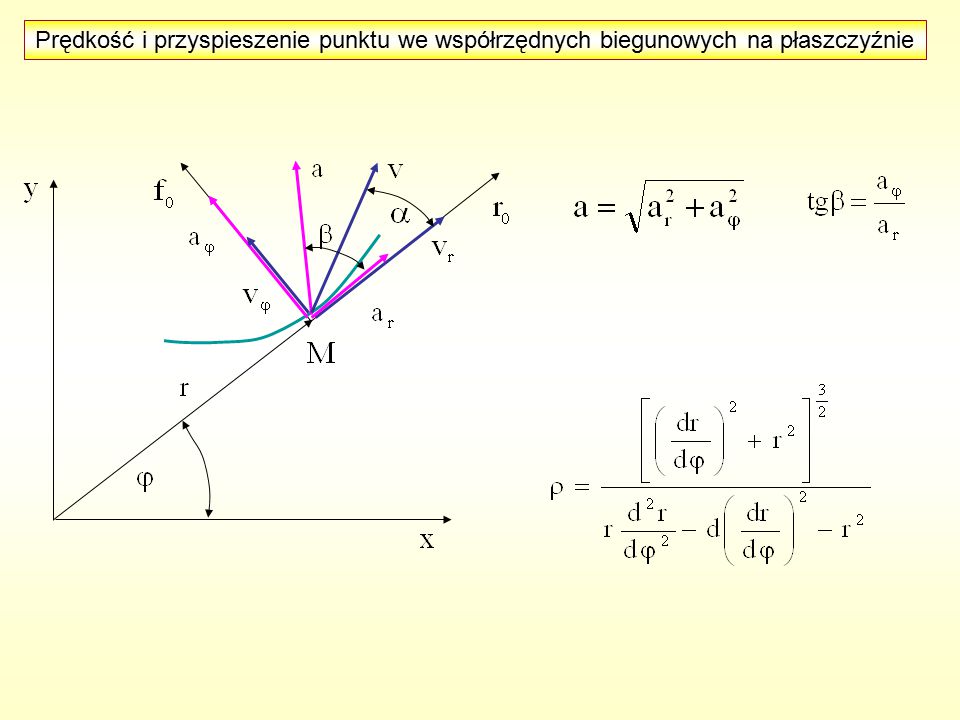
Prędkość i przyspieszenie punktu we współrzędnych biegunowych na płaszczyźnie

44
Zależność pomiędzy składowymi prędkości i przyspieszenia punktu we współrzędnych biegunowych i prostokątnych na płaszczyźnie

45
Opis położenia ciała sztywnego Ciałem sztywnym nazywamy zbiór punktów, których wzajemne odległości są stałe. Badając ruch ciała sztywnego, należy w każdej chwili określać jego położenie względem pewnego układu odniesienia, który przyjmujemy za nieruchomy. Równania ruchu trzech punktów nie mogą być dobrane dowolnie, gdyż zgodnie z definicją ciała sztywnego ich wzajemne położenia muszą być stałe. Warunek, aby trzy punkty ciała sztywnego nie leżały na jednej prostej

46
Opis położenia ciała sztywnego

47
Metoda wyznaczania prędkości punktów ciała sztywnego W ciele sztywnym wzajemne odległości punktów nie zmieniają się podczas ruchu, dlatego między prędkościami tych punktów zachodzą pewne związki. W ciele sztywnym podczas dowolnego ruchu rzuty wektorów prędkości dwóch jej dowolnych punktów na prostą łączącą te punkty są sobie równe

48
Metoda wyznaczania prędkości punktów ciała sztywnego Kąty i oznaczają kąty które prędkości punktów A i B tworzą z wektorem r

49
Wyznaczyć wartość prędkości punktu B w położeniu, gdy pręt tworzy z kierunkiem pionowym kąt ( + )
")
50
Ruch postępowy ciała sztywnego Najprostszym przypadkiem ruchu ciała sztywnego jest taki ruch, w którym wszystkie jego punkty doznają tych samych przesunięć.

51
Ruch postępowy ciała sztywnego W ruchu postępowym ciała sztywnego wszystkie punkty mają takie same prędkości, przyspieszenia i poruszają się po takich samych równolegle przesuniętych torach

52
Wyznaczyć wartość prędkości i przyspieszenia punktu B

53
Ruch obrotowy ciała sztywnego Tor każdego punktu ciała sztywnego poruszającego się ruchem obrotowym jest okręgiem, leżącym w płaszczyźnie prostopadłej do osi obrotu o środku leżącym na tej osi i opisany jest promieniem o długości równej odległości punktu od osi.

54
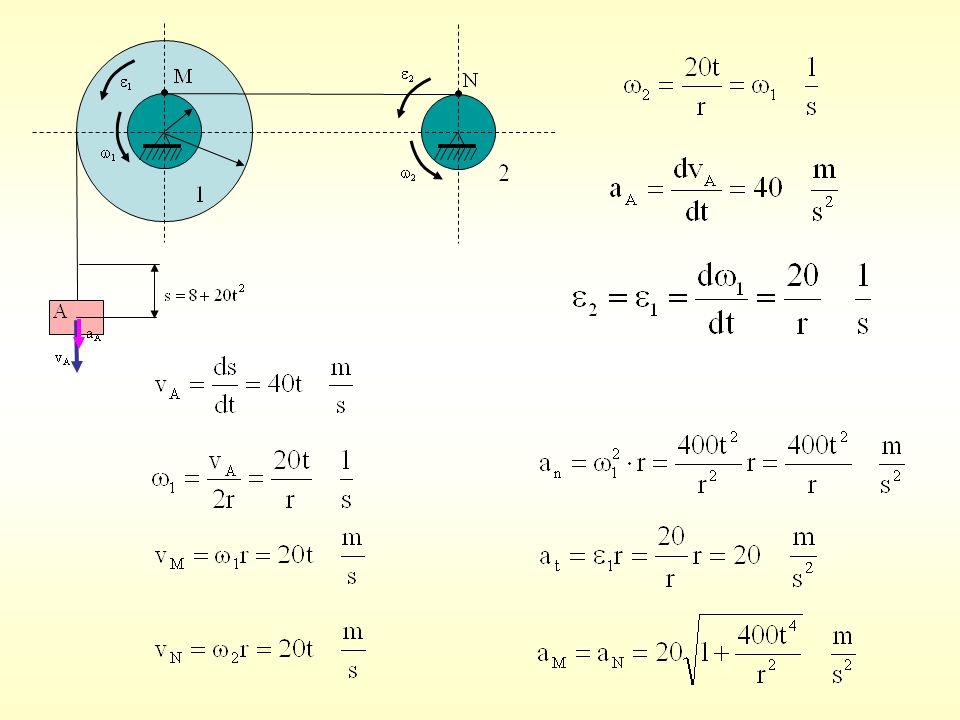
Wyznaczyć wartość prędkości i przyspieszenia tarcz kołowych

56
Ruch złożony punktu i j k

57
i j k Ruch punktu M względem układu nieruchomego 0XYZ nazywamy ruchem bezwzględnym. Ruch punktu M względem układu ruchomego 0’xyz nazywamy ruchem względnym. Ruch układu ruchomego 0’xyz względem układu nieruchomego 0XYZ nazywamy ruchem unoszenia

58
Prędkość punktu w ruchu złożonym i j k Prędkość bezwzględna punktu M Prędkość unoszenia Prędkość względna Prędkość bezwzględna punktu M w ruchu złożonym jest wypadkową prędkości unoszenia v u i prędkości względnej v w

59
Przyspieszenie punktu w ruchu złożonym i j k Przyspieszenie bezwzględne punktu M Przyspieszenie bezwzględne a M punktu M w ruchu złożonym równa się sumie wektorowej przyspieszeń unoszenia a u przyspieszenia względnego a w i przyspieszenia Coriolisa a c

60
Przyspieszenie punktu w ruchu złożonym i j k Przyspieszenie Coriolisa nie występuje, gdy ruchem unoszenia są ruchy prostoliniowy, harmoniczny, prosty i postępowy (bo =0), gdy wektor prędkości kątowej jest równoległy do wektora prędkości względnej v w oraz w przypadku, gdy prędkość względna jest równa zeru. Przyspieszenie Coriolisa wywołane obrotem kuli ziemskiej jest bardzo małe i dlatego zwykle je pomijamy, uważając Ziemie za nieruchomy układ odniesienia.

61
Przyspieszenie Coriolisa związane obrotem kuli ziemskiej

62
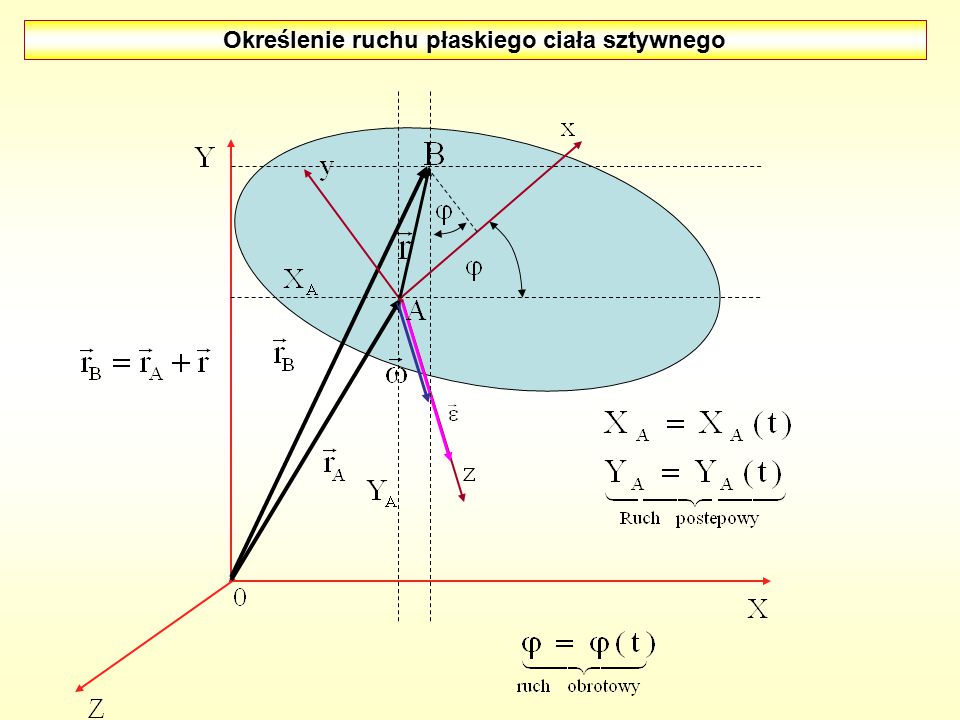
Określenie ruchu płaskiego ciała sztywnego Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie punkty ciała poruszają się w płaszczyznach równoległych do pewnej płaszczyzny, zwanej płaszczyzną ruchu płaskiego (płaszczyzną kierującą) Analizowanie ruchu płaskiego danego ciała sztywnego sprowadza się zatem do badania ruchu jednego przekroju ciała-figury płaskiej, powstałej przez przecięcie ciała płaszczyzną , równoległą do płaszczyzny kierującej 0. Jeżeli znamy prędkości i przyspieszenie dowolnego punktu A tej figury, to znamy również prędkości i przyspieszenia punktów ciała leżących na prostej prostopadłej do płaszczyzny kierującej. I przechodzącej przez punkt A

63
Dowolne przemieszczenie figury płaskiej w jej płaszczyźnie może być dokonane za pomocą przesunięcia równoległego, równego przesunięciu dowolnie obranego punktu A tej figury, oraz obrotu wokół tego punktu. I twierdzenie EULERA: Dowolne przemieszczenie figury płaskiej w jej płaszczyźnie może być dokonane za pomocą obrotu wokół pewnego punktu, zwanego środkiem obrotu. Wokół każdego środka obrotu ruch trwa nieskończenie krótko i dlatego te punkty nazywają się chwilowymi środkami obrotu. Określenie ruchu płaskiego ciała sztywnego

65
Metody wyznaczania prędkości w ruchu płaskim – metoda analityczna

66
Metody wyznaczania prędkości w ruchu płaskim – metoda chwilowego środka obrotu Chwilowy środek obrotu

67
Metody wyznaczania prędkości w ruchu płaskim – metoda superpozycji

68
Prędkość dowolnego punktu D pręta AD, poruszającego się ruchem płaskim jest równa sumie geometrycznej prędkości unoszenia dowolnie obranego punktu A tego pręta oraz prędkości względnej punktu D względem punktu A, czyli prędkości punktu D w ruchu względnym obrotowym pręta wokół punktu A. Prędkość kątowa tego ruchu obrotowego nie zależy przy tym od wyboru punktu A

69
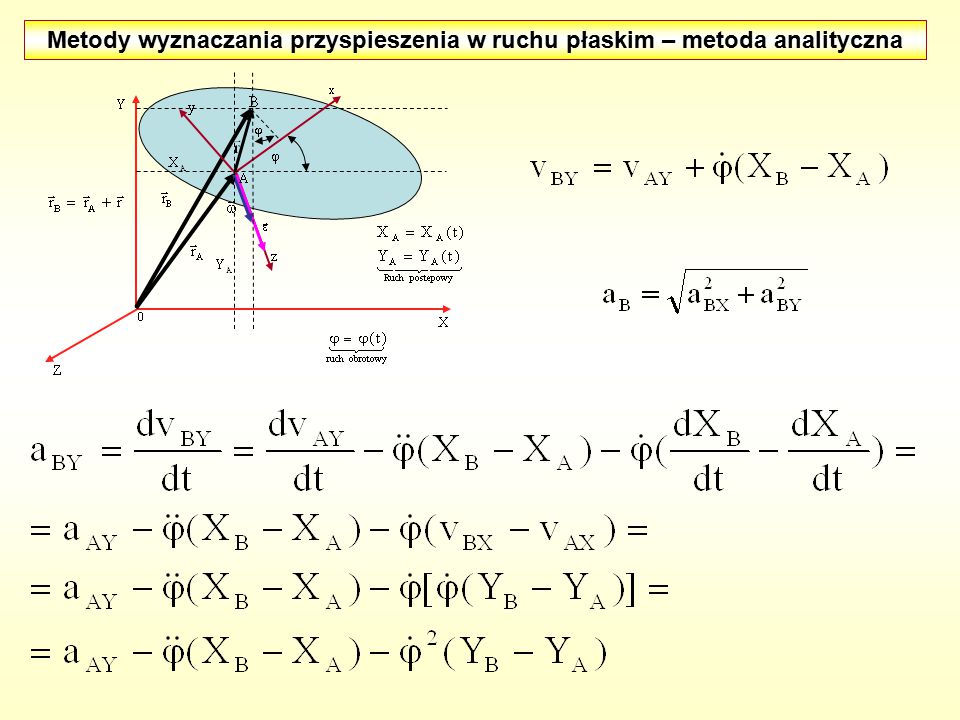
Metody wyznaczania przyspieszenia w ruchu płaskim – metoda analityczna

71
Metody wyznaczania przyspieszenia w ruchu płaskim – metoda superpozycji

72
Przyspieszenie dowolnego punktu B pręta AB poruszającego się ruchem płaskim, jest równe sumie geometrycznej przyspieszenia dowolnie obranego punktu A (w ruchu postępowym unoszenia) oraz przyspieszenia punktu B względem punktu A ( tj. przyspieszenia punktu B w ruchu obrotowym względem pręta AB wokół punktu A) Metody wyznaczania przyspieszenia w ruchu płaskim – metoda superpozycji
 Metody wyznaczania przyspieszenia w ruchu płaskim – metoda superpozycji.")
73
Metody wyznaczania przyspieszenia w ruchu płaskim – metoda chwilowego środka przyspieszeń Przyspieszenie chwilowego środka przyspieszeń (punkt P) jest równe zeru a P =0
 jest równe zeru a P =0")
74
Metody wyznaczania przyspieszenia w ruchu płaskim – metoda chwilowego środka przyspieszeń Chwilowy środek przyspieszeń



















 kierunek>")


