Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
W4. UKŁADY Z FAZOWĄ PĘTLĄ SPRZĘŻENIA ZWROTNEGO
Liniowy model pętli fazowej Wpływ transmitancji filtru na właściwości śledzące pętli Zasada działania. Model pętli fazowej Procesy synchronizacji pętli PLL Scalone pętle fazowe Detektor fazy Generatory przestrajane napięciem - VCO Przykłady realizacji układu scalonego PLL

2
Układy z fazową pętlą sprzężenia zwrotnego, często nazywane pętlami fazowymi PLL (ang. phase - locked - loop), znajdują bardzo szerokie zastosowanie we współczesnej elektronice do synchronizacji, podziału/powielania częstotliwości, pośredniej demodulacji częstotliwości, przemiany częstotliwości itp. Ciągle rosnący obszar licznych i różnorodnych zastosowań pętli fazowej w układach przetwarzania sygnałów analogowych i cyfrowych wiąże się z tym, że parametry układów z pętlą PLL są na ogół korzystniejsze niż parametry układów konwencjonalnych.
, znajdują bardzo szerokie zastosowanie we współczesnej elektronice do synchronizacji, podziału/powielania częstotliwości, pośredniej demodulacji częstotliwości, przemiany częstotliwości itp. Ciągle rosnący obszar licznych i różnorodnych zastosowań pętli fazowej w układach przetwarzania sygnałów analogowych i cyfrowych wiąże się z tym, że parametry układów z pętlą PLL są na ogół korzystniejsze niż parametry układów konwencjonalnych..")
3
Schemat blokowy układu z fazową pętlą sprzężenia zwrotnego
km - jest stałą układu mnożącego

4
Odpowiedź na wyjściu detektora fazy
- błąd fazy - wzmocnienie detektora fazy a) Charakterystyka przejściowa detektora fazy, b) charakterystyka przestrajania generatora VCO
 Charakterystyka przejściowa detektora fazy, b) charakterystyka przestrajania. generatora VCO.")
6
Pętla PLL opisana powyższymi równaniami jest układem silnie nieliniowym z powodu nieliniowości charakterystyki przejściowej detektora fazy. Nachylenie charakterystyki przejściowej detektora fazy (w przypadku zastosowania układu mnożącego) ulega nie tylko znacznym zmianom co do wartości, lecz również zmienia swój znak przy zmianie błędu fazy od (rys.a). Przy zmianach błędu fazy w przedziałach: nachylenie charakterystyki jest dodatnie i w tym przypadku w pętli występuje fazowe ujemne sprzężenie zwrotne. Dla pozostałych nachylenie charakterystyki przejściowej detektora jest ujemne i w pętli występuje fazowe dodatnie sprzężenie zwrotne.
 ulega nie tylko znacznym zmianom co do wartości, lecz również zmienia swój znak przy zmianie błędu fazy od (rys.a). Przy zmianach błędu fazy w przedziałach: nachylenie charakterystyki jest dodatnie i w tym przypadku w pętli występuje fazowe ujemne sprzężenie zwrotne. Dla pozostałych nachylenie charakterystyki przejściowej detektora jest ujemne i w pętli występuje fazowe dodatnie sprzężenie zwrotne.")
7
PĘTLA W STANIE SYNCHRONIZACJI Liniowy model pętli fazowej

11
Liniowy model pętli fazowej w stanie synchronizacji

12
Wpływ transmitancji filtru na właściwości śledzące pętli
W literaturze pętle fazowe klasyfikuje się jak układy automatycznej regulacji w oparciu o transmitancje pętli otwarte, przy czym liczba biegunów określa rząd pętli, natomiast liczba biegunów w początku układu współrzędnych określa typ pętli. Najczęściej rozważa się pętle fazowe 1-go rzędu (bez filtru) oraz pętle 2-go rzędu z typowymi pasywnymi lub aktywnymi filtrami 1-go rzędu. Dokonując tej klasyfikacji, niżej przedstawiono najbardziej typowe transmitancje stosowanych filtrów i wiążące się z nimi transmitancje pętli:
 oraz pętle 2-go rzędu z typowymi pasywnymi lub aktywnymi filtrami 1-go rzędu. Dokonując tej klasyfikacji, niżej przedstawiono najbardziej typowe transmitancje stosowanych filtrów i wiążące się z nimi transmitancje pętli:")
13
pętla pierwszego rzędu, typu pierwszego:
Transmitancja filtru Transmitancja PLL pętla drugiego rzędu, typu pierwszego z pasywnym filtrem całkującym: pętla drugiego rzędu, typu pierwszego z pasywnym filtrem proporcjonalno – całkującym:

14
pętla drugiego rzędu, typu drugiego z aktywnym filtrem proporcjonalno – całkującym:
Transmitancja filtru Transmitancja PLL Lub w postaci unormowanej: gdzie:

17
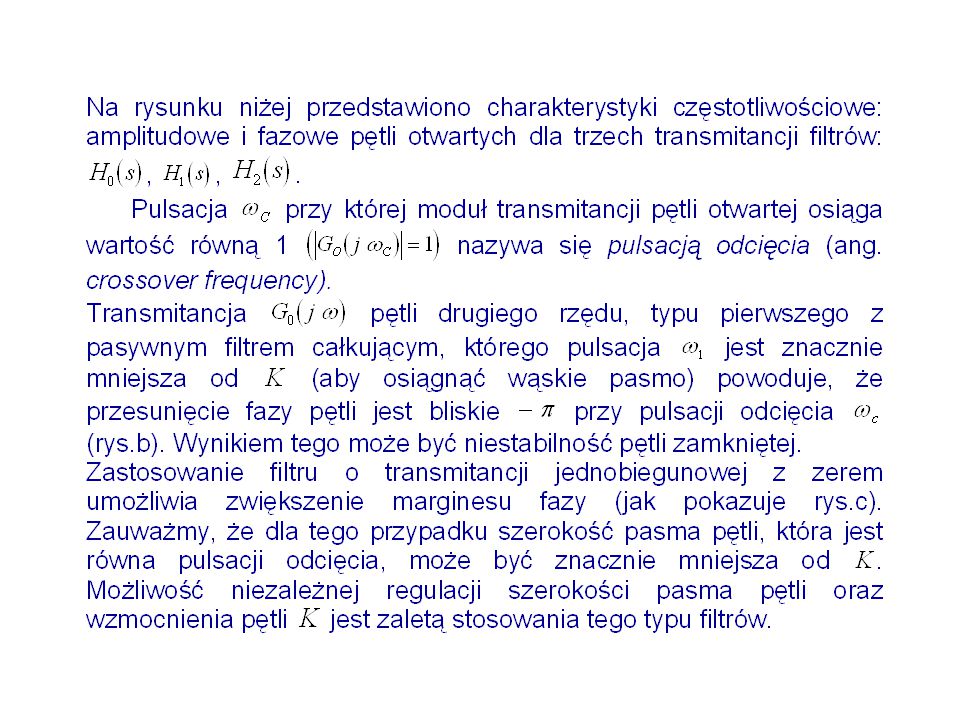
Charakterystyki częstotli-
wościowe: amplitudowe i fazowe otwartych pętli fazowych dla różnych transmitancji filtru: a) H0(s), b) H1(s), c) H2(s)
 H0(s), b) H1(s), c) H2(s)")
18
Zdolność śledzenia przez pętlę zmian fazy sygnału wejściowego określa się zwykle dla standardowych zaburzeń tego sygnału o postaci: - skokowej zmiany fazy, - skokowej zmiany częstotliwości, - liniowej zmiany częstotliwości. Przyjmując, że zaburzenie sygnału wejściowego nastąpiło w chwili , wymienione trzy sygnały standardowe i ich transformaty Laplace’a przedstawiono w tabeli 1.

19
TABELA 1

20
skokowa zmiana fazy: skokowa zmiana pulsacji:

21
liniowa zmiana pulsacji:
Błąd fazy narasta nieograniczenie z szybkością: Błąd fazy narasta w miarę upływu czasu, powodując wyjście detektora fazy z liniowego obszaru pracy, aż przy pewnej wartości błędu fazy następuje utrata synchronizacji.

22
liniowa zmiana pulsacji:
Dla wystarczająco dużego współczynnika tłumienia przebieg osiąga wartość asymptotyczną w sposób aperiodyczny, tj. bez oscylacji o dużych amplitudach i przy dostatecznie małym stosunku pętla pozostaje w stanie synchronizacji.

23
Pasmo szumowe

25
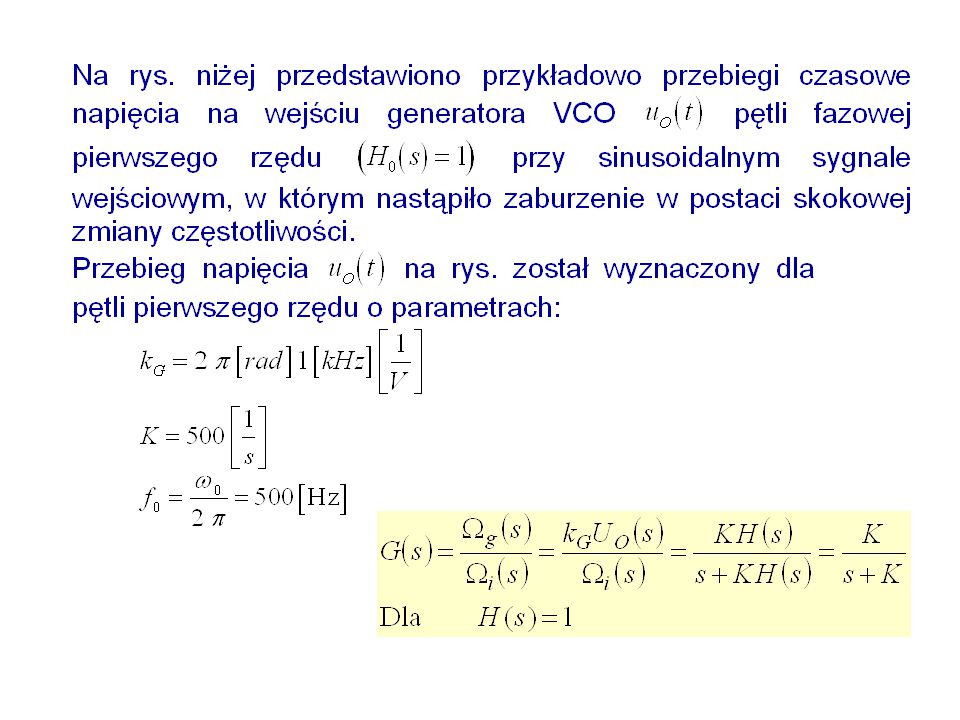
skokową zmianą częstotliwości
Odpowiedź pętli fazowej pierwszego rzędu na sinusoidalny sygnał wejściowy ze skokową zmianą częstotliwości

27
PROCESY SYNCHRONIZACJI PĘTLI PLL
Dochodzenie do stanu synchronizacji - zakres chwytania

29
Napięcie uo(t) na wejściu generatora VCO pętli osiągającej stan synchronizacji
 na wejściu generatora VCO pętli osiągającej stan synchronizacji")
32
Zakresy chwytania i trzymania pętli fazowej
Jest to zarazem charakterystyka statyczna pętli PLL jako detektora częstotliwości

33
SCALONE PĘTLE FAZOWE DETEKTOR FAZY Schemat ideowy modulatora
zrównoważonego

34
Przypadek 1

35
Przypadek 2:

36
Przypadek 2

37
Modulator zrównoważony sterowany sygnałem sinusoidalnym i synchronizowany
przebiegiem prostokątnym: a) przebiegi czasowe, b) charakterystyki detektora
 przebiegi czasowe, b) charakterystyki detektora.")
38
Średnia wartość napięcia na wyjściu detektora, po odfiltrowaniu wszystkich składowych wielkich częstotliwości: wynosi: Dokładnie tyle samo, co dla

39
Przypadek 3

40
Modulator zrównowa- żony dla dużych amplitud sygnałów wejściowych: a) prostokątne sygnały sterujące, b) charakterystyka detektora
 charakterystyka detektora.")
41
Przypadek 3

42
Detektor fazowo – częstotliwościowy PFD
Najważniejszym i najbardziej znanym sekwencyjnym detektorem fazy PD jest detektor fazowo - częstotliwościowy PFD (ang. phase/frequency detektor) z pompą ładunkową. Pętla fazowa PLL z detektorem PFD posiada niezwykle istotne zalety, jakich nie posiadają pętle PLL wykorzystujące starsze rozwiązania detektorów fazy, oparte na układach mnożących, bramkach XOR lub przerzutnikach JK. Pętla PLL z detektorem PFD jest w stanie osiągnąć stan synchronizacji, niezależnie od odstępu częstotliwości sygnału synchronizującego od warunków początkowych (przed rozpoczęciem procesu synchronizacji), a także nie wykazuje statycznego błędu fazy po osiągnięciu stanu synchronizacji. Dlatego we współczesnych scalonych pętlach PLL stosuje detektory fazowo – częstotliwościowe PFD, podobne do przedstawionego na rys. 3.
 z pompą ładunkową. Pętla fazowa PLL z detektorem PFD posiada niezwykle istotne zalety, jakich nie posiadają pętle PLL wykorzystujące starsze rozwiązania detektorów fazy, oparte na układach mnożących, bramkach XOR lub przerzutnikach JK. Pętla PLL z detektorem PFD jest w stanie osiągnąć stan synchronizacji, niezależnie od odstępu częstotliwości sygnału synchronizującego od warunków początkowych (przed rozpoczęciem procesu synchronizacji), a także nie wykazuje statycznego błędu fazy po osiągnięciu stanu synchronizacji. Dlatego we współczesnych scalonych pętlach PLL stosuje detektory fazowo – częstotliwościowe PFD, podobne do przedstawionego na rys. 3.")
43
Rys. 3. Schemat detektora fazowo-częstotliwościowego PFD

44
Detektor PFD porównuje napięcie referencyjne o częstotliwości Fr z napięciem o częstotliwości (podawanym zwrotnie poprzez programowalny dzielnik częstotliwości) i uaktywnia „pompę ładunkową”, sterowaną zależnie od różnicy faz porównywanych napięć. Pompa ładunkowa steruje prądowo wejście pasywnego filtra pętli PLL, a wytwarzane napięcie na jego wyjściu przestraja generator VCO tak, aby minimalizować sygnał błędu fazy. Możemy wyróżnić trzy charakterystyczne stany pracy detektora PFD: detekcji częstotliwości, detekcji fazy i stan synchronizacji pętli PLL. 1). Gdy różnica faz jest większa niż ± 2π, detektor PFD znajduje się w stanie detekcji częstotliwości. W tym stanie, wyjście pompy ładunkowej (absorpcyjne lub emisyjne, zależnie od tego, który z porównywanych sygnałów ma większą częstotliwość) dostarcza prąd o stałej amplitudzie, który jest całkowany przez filtr. W efekcie otrzymujemy napięcie zmieniające się w sposób ciągły, które przestraja generator VCO.
. Gdy różnica faz jest większa niż ± 2π, detektor PFD znajduje się w stanie detekcji częstotliwości. W tym stanie, wyjście pompy ładunkowej (absorpcyjne lub emisyjne, zależnie od tego, który z porównywanych sygnałów ma większą częstotliwość) dostarcza prąd o stałej amplitudzie, który jest całkowany przez filtr. W efekcie otrzymujemy napięcie zmieniające się w sposób ciągły, które przestraja generator VCO.")
45
Rys. 4. Przebiegi czasowe w stanie detekcji fazy
2). Gdy błąd fazy porównywanych napięć zmniejszy się poniżej 2π, detektor przechodzi do stanu detekcji fazy. W tym stanie pompa ładunkowa jest aktywna tylko przez część cyklu pracy i dostarcza na swoim wyjściu impulsy prądowe o stałej amplitudzie i czasie trwania zależnym od różnicy faz porównywanych sygnałów (rys. 4.)
. Gdy błąd fazy porównywanych napięć zmniejszy się poniżej 2π, detektor przechodzi do stanu detekcji fazy. W tym stanie pompa ładunkowa jest aktywna tylko przez część cyklu pracy i dostarcza na swoim wyjściu impulsy prądowe o stałej amplitudzie i czasie trwania zależnym od różnicy faz porównywanych sygnałów (rys. 4.)")
46
Rys. 5. Przebiegi czasowe w stanie synchronizacji pętli PLL
3). Gdy błąd fazy osiągnie wartość zero, pętla PLL przechodzi do stanu synchronizacji. Na wyjściu detektora PFD otrzymujemy impulsy szpilkowe (rys. 5), będące efektem skończonej szybkości działania stosowanych układów cyfrowych, które muszą być odfiltrowane, aby nie modulować generatora VCO i nie wytwarzać niepożądanych składowych widma częstotliwościowego generowanego sygnału (ang. spurious signals). Rys. 5. Przebiegi czasowe w stanie synchronizacji pętli PLL
. Gdy błąd fazy osiągnie wartość zero, pętla PLL przechodzi do stanu synchronizacji. Na wyjściu detektora PFD otrzymujemy impulsy szpilkowe (rys. 5), będące efektem skończonej szybkości działania stosowanych układów cyfrowych, które muszą być odfiltrowane, aby nie modulować generatora VCO i nie wytwarzać niepożądanych składowych widma częstotliwościowego generowanego sygnału (ang. spurious signals). Rys. 5. Przebiegi czasowe w stanie synchronizacji pętli PLL.")
47
Prosty przykład pompy ładunkowej z filtrem
-Vss -Vss

48
VCO typu integrator - przerzutnik
Generator działa na zasadzie równoważenia ładunku

49
Generator VCO w zmodyfikowanym układzie Bowesa: a) schemat ideowy,
Generator VCO w zmodyfikowanym układzie Bowesa: a) schemat ideowy, b) idealizowane przebiegi czasowe napięć w układzie
 schemat ideowy, b) idealizowane przebiegi czasowe napięć w układzie.")
50
Sprzężenie krzyżowe realizowane jest za pośrednictwem wtórników z tranzystorami T3, T4, zasilanych z oddzielnych źródeł prądowych . Tranzystory T1, T2 znajdują się na przemian w stanie odcięcia lub przewodzenia, wobec czego prąd I jednego ze źródeł prądowych w obwodach emiterów tych tranzystorów przepływa przez kondensator C raz w jednym, raz w drugim kierunku, wywołując na nim przebieg napięcia o kształcie trójkątnym. Tranzystory T5, T6 o napięciu na bazach pełnią rolę źródeł prądowych w obwodach emiterów T1, T2 o wartościach prądu I liniowo uzależnionych od napięcia sterującego . Diody D1, D2 (tranzystory w połączeniu diodowym) ograniczają niepożądane zmiany amplitudy napięć na kolektorach tranzystorów T1, T2 oraz ustalają poziomy napięć, przy których następuje załączenie tych tranzystorów.
 ograniczają niepożądane zmiany amplitudy napięć na kolektorach tranzystorów T1, T2 oraz ustalają poziomy napięć, przy których następuje załączenie tych tranzystorów.")
51
Opisany układ umożliwia generację przebiegu prostokątnego o częstotliwości do 100 MHz dzięki pracy tranzystorów w obszarze aktywnym (bez wchodzenia w stan nasycenia).
.")
52
TOPOLOGIE GENERATORÓW VCO
Układy na tranzystorach NMOS

53
Układy na tranzystorach PMOS

54
Układy komplementarne na tranzystorach NMOS i PMOS

55
Układy NMOS charakteryzują się większą transkonduktancją tranzystorów NMOS niż PMOS (przy tych samych rozmiarach), ze względu na większą ruchliwość elektronów niż dziur. Układy komplementarne CMOS pobierają mniejszą moc niż układy NMOS I PMOS We wszystkich rozwiązaniach zastosowano źródła prądowe do ustalania spoczynkowego punktu pracy, dzięki czemu zapewniono: Ograniczenie amplitudy generowanego napięcia, zabezpieczając przez to wchodzenie tranzystorów w obszar triodowy, co mogłoby powodować wzrost szumów fazowych. Źródło prądowe zapewnia wysoką impedancję węzła dołączonego do rezonatora, a przez to odsprzęga szynę zasilania lub masy od rezonatora. Źródło zasilające może być włączone od strony szyny zasilającej, jak również od strony masy (w przypadku dużych napięć zasilających od obydwu stron). Zazwyczaj źródło prądowe stosuje się od strony szyny zasilającej, co pozwala na zmniejszenia wrażliwości generowanej częstotliwości generatora VCO na napięcie zasilające Należy jednak dodać, że szumy źródła prądowego polaryzacji mają główny wkład w szumy fazowe VCO. Generator VCO działa jak mikser i przenosi szumy nisko-częstotliwościowe źródła prądowego w pasmo skupione wokół generowanej częstotliwości VCO.
. Zazwyczaj źródło prądowe stosuje się od strony szyny zasilającej, co pozwala na zmniejszenia wrażliwości generowanej częstotliwości generatora VCO na napięcie zasilające. Należy jednak dodać, że szumy źródła prądowego polaryzacji mają główny wkład w szumy fazowe VCO. Generator VCO działa jak mikser i przenosi szumy nisko-częstotliwościowe źródła prądowego w pasmo skupione wokół generowanej częstotliwości VCO.")
56
Syntezery częstotliwości realizowane w oparciu o PLL z ułamkowym/ wymiernym zwielokrotnieniem częstotliwości referencyjnej Chociaż istnieje wiele różnych metod syntezy częstotliwości, wykorzystanie pętli fazowej PLL do tego celu jest absolutnie dominującą metodą stosowaną we współczesnych systemach radiokomunikacyjnych. Analizując elementy pętli fazowej i jej reakcję na różne źródła szumów, można wykazać, że jest ona najbardziej odpowiednim układem pozwalającym na wytwarzanie stabilnych, niskoszumnych i przestrajanych sygnałów RF w różnorodnych systemach radiokomunikacyjnych, bezprzewodowych systemach transmisji danych, generacji złożonych uzależnień czasowych, itp. Podstawowym wyzwaniem technologicznym, które musi spełnić współczesna pętla PLL jest minimalizacja zajmowanej powierzchnia układu w danej technologii CMOS, poboru mocy, wielkości napięcia zasilania i kosztów wytwarzania, przy zapewnieniu określonych wymagań funkcjonalnych i parametrów wyjściowych. Ze względu na coraz szersze pasma częstotliwościowe obecnie stosowanych systemów radiokomunikacyjnych i szybkość transmisji danych, szczególnego znaczenia przy projektowaniu nabiera uwzględnienie interferencji sygnałów zakłócających i stosunku sygnału do szumu (NSR). Podstawowym kryterium tego projektowania może być minimalizacja szumów fazowych i zakłócających składowych bocznych widma częstotliwościowego syntezowanego przebiegu na wyjściu generatora VCO pętli fazowej, przy określonym poborze mocy i zapewnieniu innych, założonych parametrów projektowych.
. Podstawowym kryterium tego projektowania może być minimalizacja szumów fazowych i zakłócających składowych bocznych widma częstotliwościowego syntezowanego przebiegu na wyjściu generatora VCO pętli fazowej, przy określonym poborze mocy i zapewnieniu innych, założonych parametrów projektowych.")
57
Syntezer częstotliwości z podzielnikiem równym naturalnej liczbie N
Rys. 2. Syntezer częstotliwości z podzielnikiem równym naturalnej liczbie N Typowo, częstotliwość referencyjną otrzymuje się z oscylatora kwarcowego w zakresie 1÷100MHz.

58
Syntezer częstotliwości z podzielnikiem skalowanym pojedynczym modułem
Rys.6. Syntezer częstotliwości z podzielnikiem skalowanym pojedynczym modułem PLL Performance, Simulation and Design, 3-rd Edition Deanbook; Dean Banerjje Chapter 4. Basic Prescaler Operation W tym przypadku N=A·P, przy czym A może być zmieniane, zaś P jest zafiksowane. Wadą tego rodzaju syntezy częstotliwości jest to, że tylko N wartości, będących wielokrotnością naturalnych P, może być syntezowanych. Praktycznie stosuje się wstępne skalowanie pojedynczym modułem, np. dzieląc przez 2, w celu obniżenia częstotliwości dla właściwego podzielnika częstotliwości.

59
Syntezer częstotliwości z podzielnikiem skalowanym podwójnym modułem P/(P+1)
N= A(P+1) + (M-A)P = = PM + A Rys.7. Syntezer z podzielnikiem P/(P+1) Przykładowo, syntezer częstotliwości z podzielnikiem częstotliwości skalowanym podwójnym modułem 32/33 ma wpółczynnik skalowania P=32. W liczniku A, zliczającym w dół, zliczanych jest A cykli zafiksowanego układu wstępnego skalowania o wymiarze P+1. Tak więc, zliczanych jest A·(P+1) impulsów. Gdy licznik A osiągnie stan 0, wtedy stan licznika B, ustanowionego na początku w stan M wynosi M-A i licznik ten zaczyna zliczać w dół cykle układu wstępnego skalowania o wymiarze P, zliczając (A – M)·P impulsów. Dalej proces się powtarza cyklicznie. Przy tym: M ≥ A W przeciwnym razie współczynnik podziału jest niedozwoloną wartością.
 + (M-A)P = = PM + A. Rys.7. Syntezer z podzielnikiem P/(P+1) Przykładowo, syntezer częstotliwości z podzielnikiem częstotliwości skalowanym podwójnym modułem 32/33 ma wpółczynnik skalowania P=32. W liczniku A, zliczającym w dół, zliczanych jest A cykli zafiksowanego układu wstępnego skalowania o wymiarze P+1. Tak więc, zliczanych jest A·(P+1) impulsów. Gdy licznik A osiągnie stan 0, wtedy stan licznika B, ustanowionego na początku w stan M wynosi M-A i licznik ten zaczyna zliczać w dół cykle układu wstępnego skalowania o wymiarze P, zliczając (A – M)·P impulsów. Dalej proces się powtarza cyklicznie. Przy tym: M ≥ A. W przeciwnym razie współczynnik podziału jest niedozwoloną wartością.")
60
Z wcześniejszych zależności otrzymujemy fundamentalne równanie:
Taki sposób syntezy zapewnia lepszą rozdzielczość, chociaż nie pozwala na syntezę wszystkich wartości N. Jeżeli N jest większe lub równe iloczynowi P(P+1), wtedy warunek M ≥ A jest automatycznie spełniony. Dolna granica L, zapewniająca wszystkie dozwolone wartości N, zapewniająca N ≤ L jest preferowana jako minimalny współczynnik podziału, zapewniający przylegające przedziały częstotliwości. Przykład: 17/16 100= 17·4 + 16·2 100: 16 = 6 reszta 4 A = 4, M = 6-4 = 2.
, wtedy warunek M ≥ A jest automatycznie spełniony. Dolna granica L, zapewniająca wszystkie dozwolone wartości N, zapewniająca N ≤ L jest preferowana jako minimalny współczynnik podziału, zapewniający przylegające przedziały częstotliwości. Przykład: 17/ = 17·4 + 16·2. 100: 16 = 6 reszta 4. A = 4, M = 6-4 = 2.")
61
Dynamiczny dzielnik częstotliwości
Jak opisano wcześniej, w syntezerze o stałym, całkowitym N, częstotliwość generatora VCO jest dzielona przez N, natomiast z ułamkowym N (fractional-N), średni współczynnik podziału N + K/F jest realizowany poprzez dynamiczną zmianę współczynnika podziału w taki sposób, aby w czasie TN jest podzielnik częstotliwości był równy N, zaś w czasie TN+1 aktywny jest podzielnik częstotliwości N+1. Przeprowadzoną analizę ułamkowego współczynnika podziału powtórzymy, wprowadzając oznaczenia powszechnie stosowane w literaturze i bardziej przystające do układów cyfrowych. Średnią wartość współczynnika podziału została wyznaczona jako: Przyjmując: otrzymujemy: Fractional/Integer-N PLL Basics, Chapter Fractional-N PLL Texas Instuments, Technical Brief SWRA029 Edited by Curtis Barrett, Wireless Communication Business Unit Należy pamiętać, że przy całkowitym współczynniku podziału N, wypadkowy podział osiąga się przez dzielenie A razy przez P+1 i M−A razy przez P, tak że N=A(P+1)+(M−A)P. Teraz, od czasu do czasu, K razy w F cyklach referencyjnych ( równych FVCO/ N, wartość A jest powiększana o 1, również N jest zwiększane o 1 {należy zauważyć, że (A+1)(P+1)+ [M−(A +1)] P=N+1}.
, średni współczynnik podziału N + K/F jest realizowany poprzez dynamiczną zmianę współczynnika podziału w taki sposób, aby w czasie TN jest podzielnik częstotliwości był równy N, zaś w czasie TN+1 aktywny jest podzielnik częstotliwości N+1. Przeprowadzoną analizę ułamkowego współczynnika podziału powtórzymy, wprowadzając oznaczenia powszechnie stosowane w literaturze i bardziej przystające do układów cyfrowych. Średnią wartość współczynnika podziału została wyznaczona jako: Przyjmując: otrzymujemy: Fractional/Integer-N PLL Basics, Chapter Fractional-N PLL. Texas Instuments, Technical Brief SWRA029. Edited by Curtis Barrett, Wireless Communication Business Unit. Należy pamiętać, że przy całkowitym współczynniku podziału N, wypadkowy podział osiąga się przez dzielenie A razy przez P+1 i M−A razy przez P, tak że N=A(P+1)+(M−A)P. Teraz, od czasu do czasu, K razy w F cyklach referencyjnych ( równych FVCO/ N, wartość A jest powiększana o 1, również N jest zwiększane o 1 {należy zauważyć, że (A+1)(P+1)+ [M−(A +1)] P=N+1}.")
62
Wszystko co należy uczynić, to dodać mechanizm dynamicznej zmiany wartości licznika A. Ułamkowy akumulator, przedstawiony na poniższym rysunku, może przekształcić tę funkcję. Fractional/Integer-N PLL Basics, Chapter Fractional-N PLL Texas Instuments, Technical Brief SWRA029 Edited by Curtis Barrett, Wireless Communication Business Unit

Podobne prezentacje