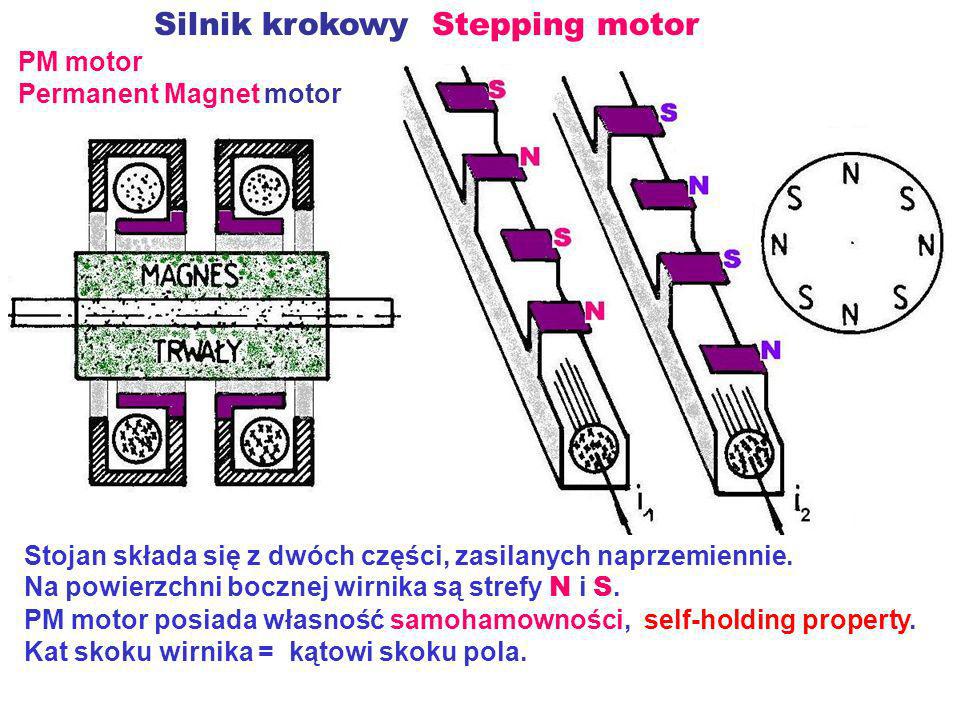
Silnik krokowy Stepping motor PM motor Permanent Magnet motor Stojan składa się z dwóch części, zasilanych naprzemiennie. Na powierzchni bocznej wirnika są strefy N i S. PM motor posiada własność samohamowności, self-holding property. Kat skoku wirnika = kątowi skoku pola.
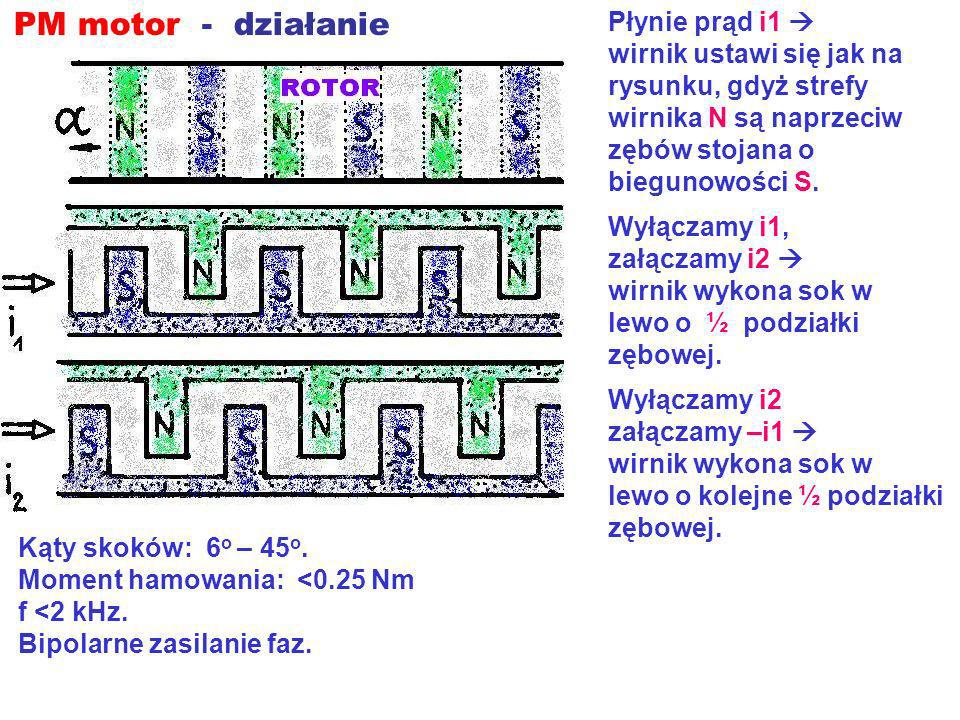
PM motor - działanie Płynie prąd i1 wirnik ustawi się jak na rysunku, gdyż strefy wirnika N są naprzeciw zębów stojana o biegunowości S. Wyłączamy i1, załączamy i2 wirnik wykona sok w lewo o ½ podziałki zębowej. Wyłączamy i2 załączamy –i1 lewo o kolejne ½ podziałki Kąty skoków: 6o – 45o. Moment hamowania: <0.25 Nm f <2 kHz. Bipolarne zasilanie faz.
Variable Reluctance motor - VR motor Fazy zasilane unipolarnie. Nie pamięta położenia, bowiem po wyłączenia zasilania nie ma pola wada. Na takiej samej zasadzie działają SRM Switched Reluctance Motors. Płynie prąd i1 wirnik ustawi się jak na rysunku gdyż zapewnia to minimum reluktancji dla strumienia od prądu i1. Wyłączamy i1, załączamy i2 pojawi się strumień pod kątem 60o wirnik, minimalizując reluktancję, wykona sok w lewo o 90o – 60o= –30o. Skok wirnika jest mniejszy od skoku pola i w przeciwnym kierunku == praca reduktorowa.
4-phase VRM Step angle = 15o 3-fazowy VRM 3-fazowy VRM: skok pola o 120o skok wirnika o +30o praca reduktorowa. Kąt skoku = 15o. Pracuje równie dobrze w obu kierunkach
Hybrid motor - Silnik krokowy hybrydowy Pamięta położenie jak PM motor. Płynie i1 wirnik ustawi się jak na rysunku: strumień wychodzi z kła N górnego, wchodzi do bieguna górnego, płynie jarzmem do bieguna poziomego, wchodzi do kła S poziomego, płynie wzdłuż osi wirnika z powrotem do kła N górnego. Wyłączamy i1, załączamy i2 biegun pod kątem 45o przyciągnie kieł N spod kąta 60o wirnik wykona skok w lewo o kąt 60 – 45 = 15o praca reduktorowa jak w VR motor. Wyłączamy i2, załączamy –i1 kolejny skok, itd.
Silnik krokowy hybrydowy dla małych kroków Silniki hybrydowe z pazurami mają kąty skoków > 7o. Mniejsze skoki (1-5o) uzyskuje się przy nabiegunnikach uzębionych. Zęby obu nakładek są przekręcone względem siebie o ½ podziałki tz. Płynie i1 strumień F1 wypływa z nakładki N, wpływa do lewego bieguna, płynie jarzmem, wypływa z prawego bieguna, wpływa do nakładki S, płynie wzdłuż osi wirnika z powrotem do nakładki N wirnik zajmuje położenie jak na rysunku. Wyłączamy i1, załączamy i2 F2 spowoduje skok wirnika w prawo o ¼ tz. Wyłączamy i2, załączamy –i1 – F1 spowoduje skok wirnika o ¼ tz. itd.
Jaki silnik wybrać ?: Permanent Magnet motors are some of the least expensive motors made. They are sometimes described as can-stack motors because the stator is constructed as a stack of two windings enclosed in metal stampings that resemble tin cans and are almost as inexpensive to manufacture. In comparison, hybrid and variable reluctance motors are made using stacked laminations with motor windings that are significantly more difficult to wind.
5-phase stepping motor/driver unit RK566BC The rotor is comprised of rotor 1, rotor 2 and the PM. Rotors are magnetized in axial direction: rot.1 is polarized N and rot.2 S. Stator contains 10 magnet poles wrapped in wire to form a coil. The coil is connected to the facing magnet pole and is wound so it becomes magnetized to the same pole when current is run through it. Running a current through a given coil magnetizes the facing poles to the same magnetism. Teeth of rot.1 and rot.2 are mechanically offset from each other by half a tooth pitch.
Zasilana faza A Zasilana faza B Nabiegunniki fazy B wytwarzają N przyciągają zęby S rot.2 rotor przekręca się o 0.72o. Nabiegunniki fazy A wytwarzają S przyciągają zęby N rot.1. High stopping precision of 0.05° (with no load) is achievable.
Holding Torque TH is the maximum holding power (torque) the stepping motor has when power is being supplied but the motor is not rotating (rated current). Pullout Torque is the maximum torque that can be output at a given speed. When selecting a motor, be sure the required torque falls within this curve. Maximum Starting Frequency ƒS is the maximum pulse speed at which the motor can start or stop instantly, without an acceleration or deceleration period, when the frictional load and inertial load of the stepping motor are 0. Driving the motor at greater than this pulse speed requires gradual acceleration or deceleration. This frequency drops when there is an inertial load on the motor.
Prędkość wirnika przy fpulses= 30 kHz: 30000 * 0.72o / 360o * 60 = 3600 rpm. Powyżej fmax należy stosować tryb pracy przyspieszanej.
Vibration Characteristics When a pulse signal is input, the motor accelerates towards the next step angle. Due to the influence of the rotor and the load inertia, the motor overshoots a certain angle, returns In the opposite direction, and then repeats this action. After the motor has repeated sufficient damping oscillations, it stops at the set position. There is an area around 200 Hz where vibration is most pronounced, and should be avoided.
Stable points: Locations where the rotor stops, with stator and rotor teeth exactly aligned. The rotor will always stop there if no external force is applied. Step Angle Accuracy type PMC: ± 0.08° type 2-Phase PK-J: ± 0.03°
Constant-current drivers secure higher motor performance than constant-voltage drivers. By chopping a DC voltage that is far higher than the motor’s rated voltage, a constant current can be kept flowing to the motor even at high speeds. Current flowing to motor coil is compared to the reference voltage. When the detection resistor voltage is lower than the reference voltage, i.e. when it hasn’t reached the rated current, the switching transistor Tr2 stays on, otherwise Tr2 goes off. The current is controlled so that the rated current is always flowing. Tr1 controls puls frequency. In the case of AC200V-230V input, the input is rectified to DC and then approximately 140V DC is applied to the 24V motor, via a chopper fast rise of current flowing through motor coils higher torque also at high speeds.
Czoper czyli przerywacz, umożliwia wymuszenie zadanego prądu.
Silniki krokowe do pracy jednokierunkowej 2 fazowy 1 fazowy Płynie prąd i1 wirnik pod nabiegunnikiem duży strumień nosek nasycony jak gdyby noska nie było wirnik ustawiony pionowo. Wyłączamy i1, załączamy i2 z racji dużej szczeliny strumień mały nosek nienasycony strumień od i2 płynie prze nosek obrót w lewo. W stanie bezprądowym wirnik ustawia się poziomo. Załączenie prądu przekręca wirnik do pionu z racji nasycenia noska. Wyłączenie prądu odsyci noski i magnes trwały obróci wirnik w lewo do poziomu. Itd.
Charakterystyka kątowa momentu T= mom. hamowania, synchronizujący Model silnika krokowego a – mom. od oddziaływania prądu i1 i pola magnesów. b – mom. reluktancyjny od i1 i jawnobiegunowości wirnika. c – mom. reluktancyjny od pola magnesów i jawnobiegunowości stojana. Strefa stabilności statecznej: zakres kątów w którym wirnik, po wytrąceniu z równowagi, wraca do niej. Warunek wykonalności skoku: równowaga w takcie poprzednim zachodziła w strefie stabilności statecznej taktu następnego. Dokładność pozycjonowania zależy od stromości ch-ki w pu. równowagi.
W układach niesymetrycznych, maksymalny moment hamowania jest raz mniejszy a raz większy. Praca niesymetryczna == praca Półkrokowa. Praca Mikrokrokowa eliminuje oscylacje cicha praca. W fazie wyłączanej prąd łagodnie maleje. W fazie załączanej prąd łagodnie narasta.
MICROSTEPPING zał. 2-gą po wył. 1-szej Single stepping a motor results in jerky movements of the motor, especially at lower speeds. Microstepping is used to achieve increased step resolution and smoother transitions between steps. In most applications, microstepping increases system performance while limiting noise and resonance problems. Microstepping works on the principle of gradually transferring current from one winding to another. This is achieved by pulse-width modulating the voltage across the windings of a motor. The duty cycle of the signal charging one winding is decreased as the duty cycle of the signal charging the next winding is increased.
Rodzaje sterowania Half step control Cyklogramy strumienia
Charakterystyka częstotliwościowa momentu Praca start-stopowa: gdy silnik rusza z pełną częstotliwością: zależy od Jsiln.+Jobc. Praca przyspieszana: stopniowe dochodzenie do pełnej częstotliwości. Sterowania silnika krokowego. Brak sprzężenia zwrotnego.
Zasilacz silnika krokowego 4-ro fazowego Stopień mocy, np. z tranzystorami w układzie Darlingtona, zawiera obwody tłumiące przepięcia przy wyłączaniu prądu w danej fazie: snubber, zwykle z diodą Zenera.
Zasilanie bipolarne Plus na wejściu I prąd płynie: +48V, Tr2, faza A w lewo, D, Tr3, masa. Plus na wejściu II prąd płynie: +48V, Tr1, faza A w prawo, D, Tr4, masa. Zasilanie jednej fazy wymaga 4 tranzystorów mocy.
Zasilanie unipolarne: podwójna ilość cewek. Prosty zasilacz. Zasilanie bipolarne: cewki pojedyncze. Bardziej złożony zasilacz.
Zasilanie bipolarne. Szybkie zasilacze mogą być realizowane na MOSFET-ach. Transistors Q2 and Q4 are N-channel MOSFETs and therefore require a positive bias on turn-on. Q1 and Q3 are P-channel MOSFETs, requiring a negative bias to turn-on. An alternate H-bridge design uses identical MOSFETs for all 4 transistors, and uses charge-pump and level shifting circuitry to drive the gates of the upper transistors.