Szkolenie SIP dla DGLP Margonin, maj 2006 Wprowadzenie do technologii nawigacji satelitarnej oraz możliwości jej wykorzystania w leśnictwie
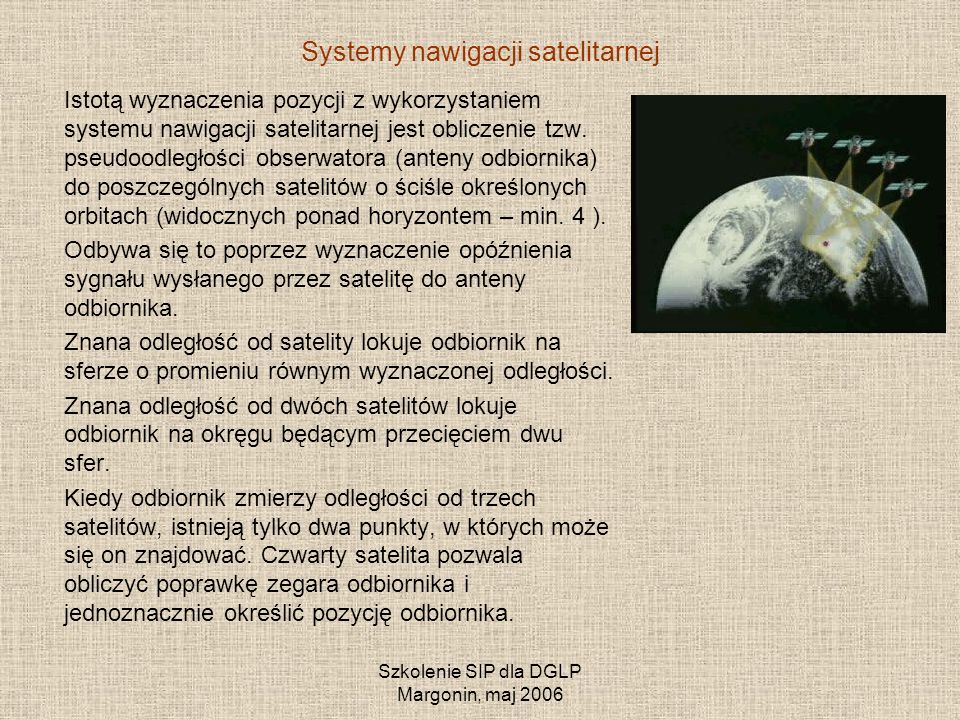
Szkolenie SIP dla DGLP Margonin, maj 2006 Systemy nawigacji satelitarnej Istotą wyznaczenia pozycji z wykorzystaniem systemu nawigacji satelitarnej jest obliczenie tzw. pseudoodległości obserwatora (anteny odbiornika) do poszczególnych satelitów o ściśle określonych orbitach (widocznych ponad horyzontem – min. 4 ). Odbywa się to poprzez wyznaczenie opóźnienia sygnału wysłanego przez satelitę do anteny odbiornika. Znana odległość od satelity lokuje odbiornik na sferze o promieniu równym wyznaczonej odległości. Znana odległość od dwóch satelitów lokuje odbiornik na okręgu będącym przecięciem dwu sfer. Kiedy odbiornik zmierzy odległości od trzech satelitów, istnieją tylko dwa punkty, w których może się on znajdować. Czwarty satelita pozwala obliczyć poprawkę zegara odbiornika i jednoznacznie określić pozycję odbiornika.
Szkolenie SIP dla DGLP Margonin, maj 2006 Systemy nawigacji satelitarnej - GPS System nawigacji satelitarnej GPS Navstar (Global Positioning System)- Globalny System Pozycjonowania – system satelitarny służący do szybkiego wyznaczenia pozycji obserwatora (anteny) w globalnym układzie odniesienia (WGS84). Stworzony i zarządzany przez Departament Obrony USA, udostępniany do zastosowań cywilnych.
Szkolenie SIP dla DGLP Margonin, maj 2006 Systemy nawigacji satelitarnej - GPS Globalny System Pozycjonowania składa się z trzech modułów: -segmentu kosmicznego – 27 satelitów okrążających Ziemię -segmentu kontroli – stacji kontrolujących i monitorujących -segmentu użytkownika – odbiorników GPS: wojsko oraz użytkownicy cywilni
Szkolenie SIP dla DGLP Margonin, maj 2006 Systemy nawigacji satelitarnej - GPS Segment kosmiczny -27 satelitów (24 aktywne + 3 zapasowe) -6 orbit kołowych, po 4 satelity na orbicie -Wysokość orbity km -Kąt nachylenia orbity do płaszczyzny równika Czas obiegu- ok. 11godz. 57 min. -Widoczność min. 5 satelitów usytułowanych ponad 5 0 nad horyzontem w dowolnym miejscu Ziemi z prawdopodobieństwem 0,9996
Szkolenie SIP dla DGLP Margonin, maj 2006 Segment kontroli -Główna Stacja Monitorująca – Baza sił powietrznych Falkon w Colorado Springs -Stacje monitorujące: Hawaje, Diego Garcia, Ascesion Stacje monitorujące przesyłają informacje do stacji głównej, gdzie wyliczane są efemerydy i poprawki zegarów satelitów Systemy nawigacji satelitarnej - GPS
Szkolenie SIP dla DGLP Margonin, maj 2006 Systemy nawigacji satelitarnej - GPS Segment użytkownika –Użytkownicy wojskowi i cywilni –Nawigacja –Pomiary –Wyznaczanie pozycji –Transfer czasu
Szkolenie SIP dla DGLP Margonin, maj 2006 Sygnały emitowane przez satelity GPS Sygnał emitowany przez satelity GPS ma postać fal nośnych (L 1 i L 2 ) kodowanej fazowo sygnałami: -informacyjnym, o prędkości 50 bitów na sekundę- depesza nawigacyjna zawierająca min. almanach i efemerydę, nakładana na kod C/A i P -pseudolosowym kodem C/A (akwizycja zgrubna), taktowanym częstotliwością 1,023 MHz, emitowany na częstotliwości nośnej L 1, każdy satelita ma swój własny kod C/A nazywany także kodem PRN, jest podstawowym kodem używanym przez odbiorców cywilnych -pseudolosowym kodem P (dokładnym), taktowanym częstotliwością 10,23 MHz, emitowany na częstotliwości nośnej L 1 i L 2 -pseudolosowym kodem Y, taktowanym częstotliwością około 0.5 Hz. – uaktywnianym w chwili zagrożenia (szyfrującym kod P)- dostępny tylko dla autoryzowanych użytkowników (wojsko)
Szkolenie SIP dla DGLP Margonin, maj 2006 Podstawowe procesy wykonywane przez odbiornik GPS Odbiór i wzmocnienie sygnału odebranego od satelity Zmniejszenie częstotliwości i przetworzenie na postać cyfrową Identyfikacja satelitów na podstawie kodu C/A (PRN) Odczytanie danych zawartych w depeszy nawigacyjnej i wyznaczenie opóźnień sygnału od satelity do anteny
Szkolenie SIP dla DGLP Margonin, maj 2006 Zasada pomiaru opóźnienia sygnału - wyznaczenie pseudoodległości Pomiar kodowy - Pomiar opóźnienia odbywa się poprzez skorelowanie kodu C/A nadawanego przez satelitę z wzorcem kodu satelity zapisanym i odtwarzanym w odbiorniku GPS. W depeszy nawigacyjnej zapisany jest czas wysłania sygnału
Szkolenie SIP dla DGLP Margonin, maj 2006 Zasada pomiaru opóźnienia sygnału- wyznaczenie pseudoodległości Pomiar fazowy -Odbiornik generuje sygnał identyczny z falą nośną satelitów i wykonuje pomiar przesunięcia fazowego tj. określa ile całkowitych oraz jaki ułamek długości fali nośnej mieści się ma drodze satelita – obserwator. -Metoda bardzo dokładna (dokładności subcentymetrowe), wymagająca zaawansowanych technologicznie odbiorników i dłuższego czasu pomiaru
Szkolenie SIP dla DGLP Margonin, maj 2006 Chwile przełomowe w wykorzystaniu systemu GPS 1994 – osiągnięcie pełnej zdolności operacyjnej 2000 – zniesienie sygnału zakłócającego S.A. (zwiększenie dokładności odczytu pozycji )
Szkolenie SIP dla DGLP Margonin, maj 2006 Poprawa spodziewanej dokładności wyznaczenia pozycji po wyłączeniu sygnału SA
Szkolenie SIP dla DGLP Margonin, maj 2006 Zwiększenie dokładności wyznaczenia pozycji - EGNOS W celu polepszenia dokładności systemu stworzono różnicowy system korekcji pomiarów GPS składający się naziemnych stacji referencyjnych, które przesyłają poprawki do trzech satelitów geostacjonarnych EGNOS. Za pośrednictwem tych satelitów, sygnał trafia do odbiorników GPS pozwalając na skorygowanie pomiaru dokonanego na podstawie danych z satelitów GPS. System występuje w trzech kompatybilnych ze sobą wersjach regionalnych : WAAS w Ameryce, EGNOS w Europie oraz japoński MSAS w Azji. EGNOS pozwala na zmniejszenie błędu pomiaru pozycji z ok.10 m do poniżej 3 metrów w odbiornikach przystosowanych do odbioru tego sygnału. Dostępność sygnału EGNOS jest często ograniczana przez przeszkody terenowe ze względu na „niskie” umiejscowienie satelity (kierunek południowy ok. 22 st. nad horyzontem).
Szkolenie SIP dla DGLP Margonin, maj 2006 Alternatywa dla GPS ? - GLONASS GLONASS Globalny System Nawigacyjny- podobnie jak GPS z tą różnicą, że właścicielem systemu są siły zbrojne Rosji. Istnieją także różnice techniczne. System składa się z 24 (docelowo) satelitów rozmieszczonych na trzech orbitach kołowych o promieniu ok km. Płaszczyzna orbit nachylona jest do płaszczyzny równika pod kątem 64,8 stopnia. Czas obiegu satelity wokół Ziemi wynosi ok. 11 godzin i 15 minut. Glonass nie osiągnął pełnej sprawności z uwagi na nie skompletowaną konstelację satelitów. W chwili obecnej na orbitach jest 13 aktywnych satelitów. W sprzedaży są dostępne specjalizowane odbiorniki obsługujące jednocześnie system GPS i GLONASS.
Szkolenie SIP dla DGLP Margonin, maj 2006 Alternatywa dla GPS - GALILEO GALILEO - „cywilny” system nawigacji satelitarnej, firmowany przez UE 2005 –wystrzelono pierwszego satelitę 2008 –planowane uruchomienie systemu Docelowo – segment globalny: 30 satelitów na trzech orbitach (w tym 3 zapasowe) 2 centra kontrolne, zlokalizowane na terenie Europy (GALILEO Control Centers) Światowa sieć stacji Up-link – transfer danych do i od satelitów Stacje nadzoru – rozmieszczone na całym globie, monitorują jakość sygnału
Szkolenie SIP dla DGLP Margonin, maj 2006 Próba oceny przydatności odbiorników GPS do pomiarów w lesie W celu oceny przydatności odbiorników GPS do pomiarów w lesie wyznaczono geodezyjnie poligon składający się z 15 punktów. Każdy z punków zlokalizowano w drzewostanie o innej charakterystyce (wieku, składzie gatunkowym i zadrzewieniu). Opracowano także metodykę pomiarów.
Szkolenie SIP dla DGLP Margonin, maj 2006 Przyjęte założenia: -Pomiar punktów poligonu jest uśrednieniem z 30 lub 60 epok -Pomiary są prowadzone po zaplanowaniu misji pomiarowej -Misje pomiarowe wyznaczają czas pomiaru, w którym spełnione są następujące parametry: -PDOP<6 -Liczba dostępnych satelitów >= 6 -Maska horyzontu = 20 o -Minimalny przedział czasu spełniający powyższe założenia – 60 min. Próba oceny przydatności odbiorników GPS do pomiarów w lesie
Szkolenie SIP dla DGLP Margonin, maj 2006 Planowanie misji pomiarowej w celu wyboru optymalnej konstelacji satelitów. Wykorzystano program Quik Plan 2.35 firmy Trimble. Interesujące nas przedziały czasu Próba oceny przydatności odbiorników GPS do pomiarów w lesie
Szkolenie SIP dla DGLP Margonin, maj 2006 Próba oceny przydatności odbiorników GPS do pomiarów w lesie Rozkład wyników pomiarów na punkcie nr 7Rozkład wyników pomiarów na punkcie nr 2 Badanie dokładności poszczególnych modeli odbiorników GPS w trybie autonomicznym zgodnie z przyjętą metodyką oraz ocena statystyczna uzyskanych wyników.
Szkolenie SIP dla DGLP Margonin, maj 2006 Prezentacja uzyskanych wyników Model odbiornika GPS% trafień z błędem < 5 mBłąd średniBłąd max.Odchylenie stand.Metoda MobileMapper85,703,817,411,86 60 epok średnia AP HI-302CF66,704,798,972,06 60 epok średnia AP GPS Receiver with Bluetooth Wireless Technology 1663,304,9511,412,89 60 epok średnia AP GPS Receiver with Bluetooth Wireless Technology60,004,5913,333,11 60 epok średnia AP Fortuna Clip-On Bluetooth GPS Receiver39,206,3215,113,41 60 epok średnia AP GPS ,8016,39187,1128,16 60 epok średnia AP HI-303MMF27,6013,2155,4812,19 60 epok średnia AP GPSmap 76S27,3023,92124,3835,03 60 epok średnia AP GPS ,0016,2472,7114,49 60 epok średnia AP Yakumo7,7020,2168,4420,29 60 epok średnia AP
Szkolenie SIP dla DGLP Margonin, maj 2006 Model odbiornika GPS% trafień z błędem < 5 mBłąd średniBłąd max.Odchylenie stand.Metoda GPS Receiver with Bluetooth Wireless Technology 1686,703,879,281,90 30 epok średnia AP GPS Receiver with Bluetooth Wireless Technology56,005,6516,213,87 30 epok średnia AP Fortuna Clip-On Bluetooth GPS Receiver50,805,5716,043,62 30 epok średnia AP HI-302CF37,806,0222,164,01 30 epok średnia AP GPS ,0014,5756,1412,00 30 epok średnia AP HI-303MMF20,0011,0656,098,62 30 epok średnia AP GPS ,0024,2499,6321,44 30 epok średnia AP Prezentacja uzyskanych wyników
Szkolenie SIP dla DGLP Margonin, maj 2006 Praktyczne wykorzystanie pomiarów GPS Potencjalne zastosowania w leśnictwie: -pomiar obiektów poligonowych, liniowych i punktowych nie wymagających „dużej” precyzji – wszystkie działy gospodarki leśnej min. ochrona lasu, hodowla, użytkowanie, selekcja i nasiennictwo, łowiectwo, ochrona p.poż. - nawigowanie „po trasie i na punkt” -wyznaczanie pozycji – identyfikacja obiektów w terenie -prace urządzeniowe i inwentaryzacyjne
Szkolenie SIP dla DGLP Margonin, maj 2006 Z czego możemy korzystać – czyli sprzęt i oprogramowanie Sprzęt: -Proste odbiorniki jednoczęstotliwościowe (w formie kart rozszerzeń lub modułów komunikujących się bezprzewodowo do notebooków i palmtopów, odbiorniki zintegrowane) -Specjalizowane jednoczęstotliwościowe odbiorniki GPS -Odbiorniki dwuczęstotliwościowe -Odbiorniki RTK
Szkolenie SIP dla DGLP Margonin, maj 2006 Z czego możemy korzystać – czyli sprzęt i oprogramowanie Oprogramowanie: - ArcPad 7 - mLAS Inżynier - Farm Site Mate - ArcGis Oprogramowanie dedykowane i udostępniane przez producentów sprzętu: np. MobileMapper Office (Thales), Pathfinder Office (Trimble), GIS DataPRO (Leica)
Szkolenie SIP dla DGLP Margonin, maj 2006 Praktyczne zastosowanie GPS Pomiar wielkości i kształtu obiektów poligonowych na przykładzie gniazd w rębniach częściowych
Szkolenie SIP dla DGLP Margonin, maj 2006 Praktyczne zastosowanie GPS Pomiar wielkości i kształtu obiektów poligonowych na przykładzie działek działek zrębowych (na działkach zrębowych pozostawiono otulinę zbiorników wodnych)
Szkolenie SIP dla DGLP Margonin, maj 2006 Praktyczne zastosowanie GPS Wyznaczanie współrzędnych obiektów i nawigowanie do nich na przykładzie drzew dorodnych
Szkolenie SIP dla DGLP Margonin, maj 2006 Praktyczne zastosowanie GPS Identyfikacja obiektów oraz uzyskiwanie informacji z bazy opisowej na przykładzie programu mLAS Inżynier
Szkolenie SIP dla DGLP Margonin, maj 2006 Podsumowanie W teren ruszamy po zaplanowaniu czasu misji pomiarowej Włączamy odbiornik w miarę możliwości w terenie otwartym (skróci to czas startu GPS-a) W miejscu pomiaru sprawdzamy jakość sygnału – tzw. „fix”, który powinien być „3D” oraz PDOP, który powinien być < 6 W odbiornikach obsługujących korekcję DGPS (np. Egnos) włączamy usługę – może to polepszyć dokładność pomiaru W przypadku korzystania z oprogramowania pomiarowego umożliwiającego uśrednianie pomiarów oraz weryfikację parametrów opisujących jakość sygnału ustawiamy uśrednienie z co najmniej 30 epok i zapis pomiaru przy spełnieniu: PDOP<6, fix=3D Obiekty powierzchniowe i liniowe mierzymy wykonując pomiar ciągły z interwałem np. 2 sekundy – umożliwi to późniejszą generalizację oraz eliminację błędów grubych spowodowanych np. chwilowym zaniku sygnału lub jego zniekształceniem W miarę możliwości podczas pomiaru orientujemy antenę odbiornika tak aby był widoczny horyzont południowy Polepszenie dokładności pomiarów można osiągnąć poprzez stosowanie się do następujących zaleceń: