Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Technika Cyfrowa Seminarium Dyplomowe Wydział Informatyki, Elektroniki i Telekomunikacji Katedra Elektroniki Kraków, 29 października 2012 Jan Dulęba, Piotr Widacha

2
1. W Parametry dynamiczne bramek to: a) Czas konwersji b) Czas narastania c) Czas propagacji
 Czas konwersji b) Czas narastania c) Czas propagacji")
3
1. W Parametry dynamiczne bramek to:, - czasy propagacji ze stanu 1 do 0 i 0 do 1 - średni czas propagacji,, - czas narastania i opadania sygnału

4
2. Stan metastabilności: Przerzutnik lub inny układ sekwencyjny może stracić orientację, jeżeli dane zmieniają się w czasie ustalenia t s, poprzedzającym pojawienie się impulsu zegara. a) stan metastabilny może się pojawić jeżeli dane zmieniają się w czasie ustalenia, poprzedzającym pojawienie się impulsu zegara b) stan, w jakim znajdzie się przerzutnik po wyjściu ze stanu metastabilnego jest losowy c) poziom napięcia na jego wyjściu przerzutnika może trwać w zawieszeniu w okolicy progu przełączenia d) przerzutnik w stanie metastabilnym może ustalić jakiś stan na wyjściu, lecz po chwili samoistnie może zmienić ten stan na przeciwny
 stan metastabilny może się pojawić jeżeli dane zmieniają się w czasie ustalenia, poprzedzającym pojawienie się impulsu zegara b) stan, w jakim znajdzie się przerzutnik po wyjściu ze stanu metastabilnego jest losowy c) poziom napięcia na jego wyjściu przerzutnika może trwać w zawieszeniu w okolicy progu przełączenia d) przerzutnik w stanie metastabilnym może ustalić jakiś stan na wyjściu, lecz po chwili samoistnie może zmienić ten stan na przeciwny.")
5
3 Licznik rewersyjny to: a)Licznik dwukierunkowy b) Licznik liczący tylko w tył c) Licznik wymagający dodatkowego sygnału sterującego
Licznik dwukierunkowy b) Licznik liczący tylko w tył c) Licznik wymagający dodatkowego sygnału sterującego")
6
3 Licznik rewersyjny to: Licznik liczący „do przodu” albo „do tyłu” w zależności od sygnałów na wejściach dodatkowych nazywamy licznikiem rewersyjnym. Licznik rewersyjny (angielskie reversible counter), układ licznika, mogący zarówno zwiększać, jak i zmniejszać stan licznika. W tym celu licznik rewersyjny ma dwa wejścia: zegarowe do zwiększania i zegarowe do zmniejszania albo zegarowe i sterujące rodzajem przyrostu.
, układ licznika, mogący zarówno zwiększać, jak i zmniejszać stan licznika. W tym celu licznik rewersyjny ma dwa wejścia: zegarowe do zwiększania i zegarowe do zmniejszania albo zegarowe i sterujące rodzajem przyrostu..")
7
4 Schemat bramki XOR zrealizowanej za pomocą bramek NOR przedstawia rysunek: a) b) c)
 b) c)")
8
5. Sumę oraz przeniesienie półsumatora można wyrazić za pomocą funkcji (A, B – wejścia półsumatora): a)A B (suma) b) A B (przeniesienie) c) A + B
: a)A B (suma) b) A B (przeniesienie) c) A + B.")
9
5. Sumę oraz przeniesienie półsumatora można wyrazić za pomocą funkcji (A, B – wejścia półsumatora):
:.")
10
6. Schemat układu w konfiguracji dwójki liczącej przedstawia: a) b) c) d)
 b) c) d)")
11
7. W charakterystyce przejściowej, następujących bramek występuje histereza: a)inwertera CMOS b)bramki OC c)bramki Schmitta Bramka Schmitta- Przełączania bramki Schmitta następuje przy przekraczaniu napięcia ok. 1,7V przy narastaniu sygnału wejściowego i przy napięciu ok. 0,9V przy opadaniu tegoż sygnału. Bramki z układem Schmitta są stosowane na wejściach układów cyfrowych do formowania impulsów zwłaszcza przy silnych zakłóceniach.
inwertera CMOS b)bramki OC c)bramki Schmitta Bramka Schmitta- Przełączania bramki Schmitta następuje przy przekraczaniu napięcia ok. 1,7V przy narastaniu sygnału wejściowego i przy napięciu ok. 0,9V przy opadaniu tegoż sygnału. Bramki z układem Schmitta są stosowane na wejściach układów cyfrowych do formowania impulsów zwłaszcza przy silnych zakłóceniach..")
12
7. W charakterystyce przejściowej, następujących bramek występuje histereza:

13
8. Prawidłowe stany licznika pierścieniowego to: a) 10000100 b) 00010000 c) 01000010
 10000100 b) 00010000 c) 01000010")
14
8. Prawidłowe stany licznika pierścieniowego to:

15
9. Licznikiem modulo m jest: a) Licznik m-bitowy b) Licznik liczący od m-1 do 0 c) Licznik liczący od 1 do 2m-1 i zwiększający swój stan o 2 co cykl zegara Jeżeli licznik przechodzi przez wszystkie stany cykliczne (tzn. po przejściu N stanów cykl jest powtarzany), to licznik taki nazywamy licznikiem modulo N ( w skrócie mod N)
 Licznik m-bitowy b) Licznik liczący od m-1 do 0 c) Licznik liczący od 1 do 2m-1 i zwiększający swój stan o 2 co cykl zegara Jeżeli licznik przechodzi przez wszystkie stany cykliczne (tzn. po przejściu N stanów cykl jest powtarzany), to licznik taki nazywamy licznikiem modulo N ( w skrócie mod N).")
16
10 Funkcja axy’+ax’y+a’y jest równa: a) (ax) y b) 1 c) a(x y) axy’ + ax’y + a’y = y(a’+ax’) + axy’ = =y(a’+x’) + axy’ = y(ax)’+ axy’ = (ax) y
 (ax) y b) 1 c) a(x y) axy’ + ax’y + a’y = y(a’+ax’) + axy’ = =y(a’+x’) + axy’ = y(ax)’+ axy’ = (ax) y")
17
10 Funkcja axy’+ax’y+a’y jest równa:

18
11 Prawo pochłaniania to: a)x(x + y) = x b) x(x + y) = y c) x + (xy) = x
x(x + y) = x b) x(x + y) = y c) x + (xy) = x")
19
Prawa przemiennosci (pp) (2.1) x + y = y + x; (2.2) xy = yx; Prawa łacznosci (pł) (2.3) (x + y) + z = x + (y + z); (2.4) (xy)z = x(yz); Prawa rozdzielnosci (pr) (2.5) x + (yz) = (x + y) · (x + z); (2.6) x · (y + z) = xy + xz; Prawa identycznosci (pid) (2.7) x + 0 = x; (2.8) x · 1 = x; Prawa dopełnienia (pd) (2.9) x + ¯x = 1; (2.10) x · ¯x = 0. Prawa idempotentnosci (p2x) (2.11) x + x = x; (2.12) x · x = x; Drugie prawa identycznosci (p01) (2.13) x + 1 = 1; (2.14) x · 0 = 0; Prawa pochłaniania (ppch) (2.15) (x · y) + x = x; (2.16) (x + y) · x = x; 11 Prawo pochłaniania to:
 (2.11) x + x = x; (2.12) x · x = x; Drugie prawa identycznosci (p01) (2.13) x + 1 = 1; (2.14) x · 0 = 0; Prawa pochłaniania (ppch) (2.15) (x · y) + x = x; (2.16) (x + y) · x = x; 11 Prawo pochłaniania to:.")
20
12) W automacie Mealy’ego stany wyjściowe zależą: a) tylko od sygnałów wejściowych automatu b) tylko od stanu w jakim automat się znajduje c) od sygnałów wejściowych i stanu poprzedniego automatu
 W automacie Mealy’ego stany wyjściowe zależą: a) tylko od sygnałów wejściowych automatu b) tylko od stanu w jakim automat się znajduje c) od sygnałów wejściowych i stanu poprzedniego automatu")
21
12) W automacie Mealy’ego stany wyjściowe zależą: Związki opisujące tzw. automat Mealy’ego: : A X A : A X Y Funkcje i to odpowiednio funkcja przejść i funkcja wyjść. stany wejść: X = {X 0, X 1,..., X N-1 }, X = {x 1, x 2,..., x n } stany wyjść: Y = {Y 0, Y 1,..., Y M-1 }, Y = {y 1, y 2,..., y m } stany pamięci (stanów wewnętrznych) A = {A 0, A 1,..., A K-1 }, A = {Q 1, Q 2,..., Q k } ______________________________________________________________________ Jeśli stan pamięci zależy od stanu wejść, to stan wyjść można uzależnić wprost tylko od stanu pamięci (zależność od stanu wejść będzie pośrednia) : A X A : A Y Tak zdefiniowany model matematyczny nazywamy automatem Moore’a.
 A = {A 0, A 1,..., A K-1 }, A = {Q 1, Q 2,..., Q k } ______________________________________________________________________ Jeśli stan pamięci zależy od stanu wejść, to stan wyjść można uzależnić wprost tylko od stanu pamięci (zależność od stanu wejść będzie pośrednia) : A X A : A Y Tak zdefiniowany model matematyczny nazywamy automatem Moore’a..")
22
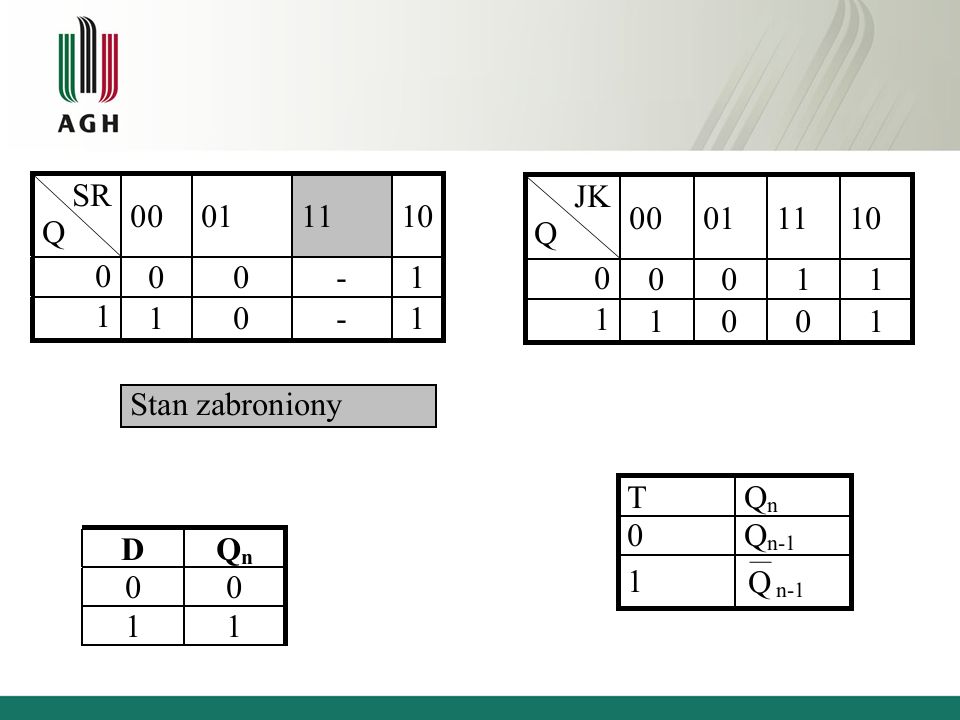
13 Prawidłowe funkcje określające stan następny Q(t) dla przerzutników RS, JK, T oraz D to odpowiednio:
 dla przerzutników RS, JK, T oraz D to odpowiednio:")
24
14 Automat niezupełny to: a) Automat z nie w pełni określoną funkcją przejść b) Automat z w pełni określoną funkcją przejść c) Automat z nie w pełni określoną funkcją wyjść
 Automat z nie w pełni określoną funkcją przejść b) Automat z w pełni określoną funkcją przejść c) Automat z nie w pełni określoną funkcją wyjść")
25
14 Automat niezupełny to: Automat niezupełny to taki, który ma nieokreślone niektóre stany lub/i wyjścia (w tabeli występują kreski „-„).Automat niezupełny może mieć kilka automatów minimalnych lub może nie mieć żadnego, (czyli sam jest swoim automatem minimalnym). Przykład :

26
15) Czas ustalania w przypadku przerzutnika można zdefiniować jako: a) minimalny czas, w którym sygnał wejściowy musi pozostać na wejściach informacyjnych po wystąpieniu wyzwalającego zbocza sygnału zegarowego (czas utrzymania) b) minimalny czas, w którym sygnał musi być obecny na wejściach informacyjnych przerzutnika przed nadejściem wyzwalającego zbocza impulsu zegarowego c)minimalny czas jaki musi upłynąć od zakończenia sygnału programującego do chwili kiedy może pojawić się sygnał zegarowy lub inny sygnał programujący (czas martwy) Czas ustalenia (wyprzedzenia) t s (setup time) - jest to minimalny czas, w którym sygnał musi być obecny na wejściach informacyjnych przerzutnika przed nadejściem wyzwalającego zbocza (lub poziomu) impulsu zegarowego
 Czas ustalania w przypadku przerzutnika można zdefiniować jako: a) minimalny czas, w którym sygnał wejściowy musi pozostać na wejściach informacyjnych po wystąpieniu wyzwalającego zbocza sygnału zegarowego (czas utrzymania) b) minimalny czas, w którym sygnał musi być obecny na wejściach informacyjnych przerzutnika przed nadejściem wyzwalającego zbocza impulsu zegarowego c)minimalny czas jaki musi upłynąć od zakończenia sygnału programującego do chwili kiedy może pojawić się sygnał zegarowy lub inny sygnał programujący (czas martwy) Czas ustalenia (wyprzedzenia) t s (setup time) - jest to minimalny czas, w którym sygnał musi być obecny na wejściach informacyjnych przerzutnika przed nadejściem wyzwalającego zbocza (lub poziomu) impulsu zegarowego")
27
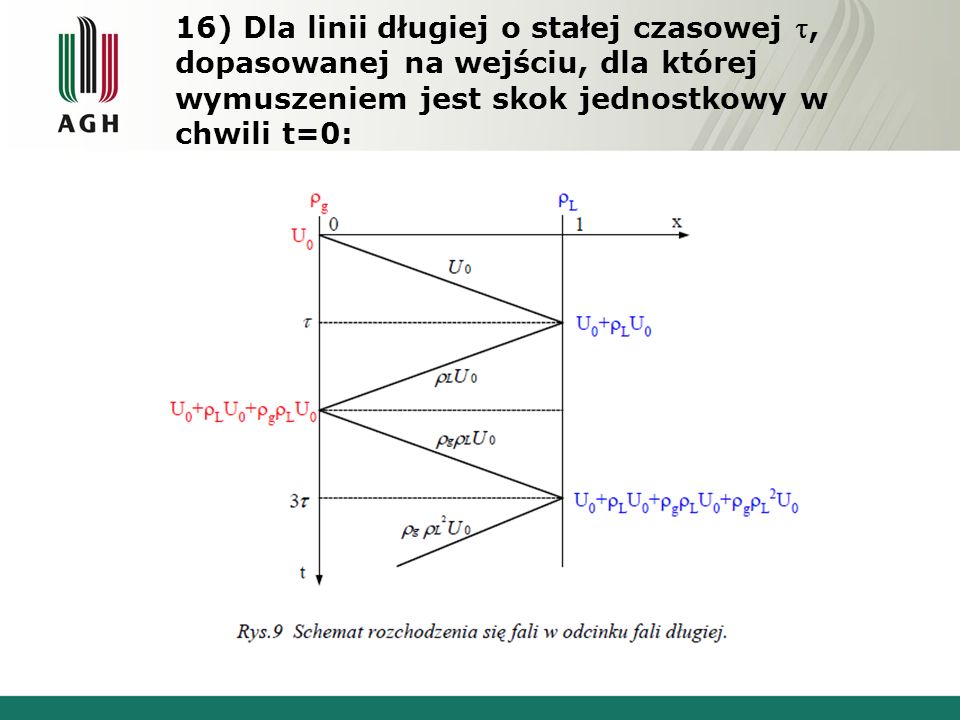
16) Dla linii długiej o stałej czasowej , dopasowanej na wejściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0: a) napięcie na wejściu będzie miało stałą wartość po czasie t>0 b) napięcie na wyjściu będzie miało stałą wartość po czasie t> c) napięcie na wejściu będzie miało stałą wartość po czasie t>2
 Dla linii długiej o stałej czasowej , dopasowanej na wejściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0: a) napięcie na wejściu będzie miało stałą wartość po czasie t>0 b) napięcie na wyjściu będzie miało stałą wartość po czasie t> c) napięcie na wejściu będzie miało stałą wartość po czasie t>2")
28
16) Dla linii długiej o stałej czasowej , dopasowanej na wejściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0:
 Dla linii długiej o stałej czasowej , dopasowanej na wejściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0:")
30
17) Dla linii długiej o stałej czasowej , dopasowanej na wejściu i zwartej na wyjściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0: a) napięcie na wejściu będzie zawsze równe zero b) napięcie na wyjściu będzie zawsze równe zero c) napięcia w stanie ustalonym na wejściu i wyjściu będzie równe zero
 Dla linii długiej o stałej czasowej , dopasowanej na wejściu i zwartej na wyjściu, dla której wymuszeniem jest skok jednostkowy w chwili t=0: a) napięcie na wejściu będzie zawsze równe zero b) napięcie na wyjściu będzie zawsze równe zero c) napięcia w stanie ustalonym na wejściu i wyjściu będzie równe zero")
31
18) Liczba 4 bitowa 1111 jest równa: a) 0x0D (hex) jeśli jest zapisana w kodzie dwójkowym b) –2 jeśli jest zapisana w kodzie uzupełnień do dwóch c) –1 jeśli jest zapisana w kodzie uzupełnień do dwóch
 Liczba 4 bitowa 1111 jest równa: a) 0x0D (hex) jeśli jest zapisana w kodzie dwójkowym b) –2 jeśli jest zapisana w kodzie uzupełnień do dwóch c) –1 jeśli jest zapisana w kodzie uzupełnień do dwóch")
32
18) Liczba 4 bitowa 1111 jest równa: Wartości wag pozycji w zapisie U2 waga-2 n-1 2 n-2 2 n-3 2 2121 2020 cyfra b n-1 b n-2 b n-3...b2b2 b1b1 b0b0 b n-1 b n-2 b n-3...b 2 b 1 b 0 (U2) = b n-1 (-2 n-1 ) + b n-2 2 n-2 + b n-3 2 n-3 +... + b 2 2 2 + b 1 2 1 + b 0 2 0 gdzie b - bit, cyfra dwójkowa 0 lub 1 n - liczba bitów w zapisie liczby 1111= -2^3 + 2^2 + 2^1 + 2^0= -1

33
18) Liczba 4 bitowa 1111 jest równa: Wartości wag pozycji w zapisie U1 waga-2 n-1 +12 n-2 2 n-3 2 2121 2020 cyfra b n-1 b n-2 b n-3...b2b2 b1b1 b0b0 b n-1 b n-2 b n-3...b 2 b 1 b 0 (U1) = b n-1 (-2 n-1 +1) + b n-2 2 n-2 + b n-3 2 n-3 +... + b 2 2 2 + b 1 2 1 + b 0 2 0 gdzie b - bit, cyfra dwójkowa 0 lub 1 n - liczba bitów w zapisie liczby 1111= (-2^3 +1) + 2^2 + 2^1 + 2^0 = 0
 + 2^2 + 2^1 + 2^0 = 0.")
34
18) Liczba czterobitowa 1111 a) przesunięta arytmetycznie o jeden bit w prawo da wynik równy 1111 b) przesunięta logicznie o jeden bit w prawo da wynik 0111 c) zapisana w kodzie uzupełnień do dwóch jest równa -15.
 Liczba czterobitowa 1111 a) przesunięta arytmetycznie o jeden bit w prawo da wynik równy 1111 b) przesunięta logicznie o jeden bit w prawo da wynik 0111 c) zapisana w kodzie uzupełnień do dwóch jest równa -15.")
35
18) Liczba czterobitowa 1111 Przesunięcia logiczne dokonywane są wg. schematu: - w prawo 0->xxxxxxxx-> C np. 11111111 x 01111111 1... 00000001 1 00000000 1 00000000 0 - w lewo C<-xxxxxxxx<-0 ( zera będą się przesuwały w odwrotną stronę )
.")
36
18) Liczba czterobitowa 1111 Przesunięcie arytmetyczne w lewo działa dokładnie jak przesunięcie logiczne. Przesunięcie arytmetyczne w prawo można opisać: (bit 7)->xxxxxxxx->C oznacz to, że zawartość jest przesuwana w prawo, a na pozycji najbardziej znaczącego bitu "ląduje" jego kopia. np. 011111111 x 001111111 1... 000000000 0 ale dla liczby ujemnej w kodzie U2: 10000000 x 11000000 0 11100000 0... 11111111 1 przesunięcie arytmetyczne w prawo stosuje się przy liczbach zapisanych w kodzie U2 ( konsekwencją zastosowania przesunięcia logicznego będzie błędny wynik )
->xxxxxxxx->C oznacz to, że zawartość jest przesuwana w prawo, a na pozycji najbardziej znaczącego bitu ląduje jego kopia. np x ale dla liczby ujemnej w kodzie U2: x przesunięcie arytmetyczne w prawo stosuje się przy liczbach zapisanych w kodzie U2 ( konsekwencją zastosowania przesunięcia logicznego będzie błędny wynik ).")
37
19. Prawdziwe są zdania: a) pamięci typu flash to szybki rodzaj pamięci RAM b) pamięci SRAM to wolny (ang. Slow) rodzaj pamięci RAM c) pamięci SRAM wymagają odświeżania d) pamięci dynamiczne posiadają pojemności wewnętrzne i dlatego nie tracą zawartości po wyłączeniu napięcia zasilania e) pamięci DRAM wymagają odświeżania
 pamięci typu flash to szybki rodzaj pamięci RAM b) pamięci SRAM to wolny (ang. Slow) rodzaj pamięci RAM c) pamięci SRAM wymagają odświeżania d) pamięci dynamiczne posiadają pojemności wewnętrzne i dlatego nie tracą zawartości po wyłączeniu napięcia zasilania e) pamięci DRAM wymagają odświeżania.")
38
19) Prawdziwe są zdania: a) pamięć synchroniczna to taka która wymaga sygnału zegarowego b) pamięć dwuportowa to taka która posiada tylko jedną magistralę adresową i dwie magistrale danych: jedną do odczytu drugą do zapisu c) pamięć ROM zachowuje swoją zawartość po wyłączeniu zasilania
 Prawdziwe są zdania: a) pamięć synchroniczna to taka która wymaga sygnału zegarowego b) pamięć dwuportowa to taka która posiada tylko jedną magistralę adresową i dwie magistrale danych: jedną do odczytu drugą do zapisu c) pamięć ROM zachowuje swoją zawartość po wyłączeniu zasilania")
39
20) Prawdziwe są zdania: a) pamięć EEPROM składa się z tranzystorów ze swobodną bramką (ang. floating gate) b) podstawowa komórka pamięci DRAM składa się z mikro-kondensatora c) podstawowa komórka pamięci SRAM składa się z jednego tranzystora
 b) podstawowa komórka pamięci DRAM składa się z mikro-kondensatora c) podstawowa komórka pamięci SRAM składa się z jednego tranzystora.")
40
21) Prawdziwe są zdania: a) multiplekser N:1 pobiera N danych, a wyprowadza tylko jedną (wybraną) b) PISO (Parallel-In Serial Out) – to układ który pobiera dane równolegle i wyprowadza je szeregowo c) FIFO – to bufor, który wyprowadza dane w takiej samej kolejności w jakiej zostały podane na wejście
 Prawdziwe są zdania: a) multiplekser N:1 pobiera N danych, a wyprowadza tylko jedną (wybraną) b) PISO (Parallel-In Serial Out) – to układ który pobiera dane równolegle i wyprowadza je szeregowo c) FIFO – to bufor, który wyprowadza dane w takiej samej kolejności w jakiej zostały podane na wejście")
41
22) Sonda oscyloskopowa: a) składa się z dzielnika rezystancyjnego oraz pojemnościowego, podział napięcia tych dzielników jest taki sam b) zwiększa rezystancję i zmniejsza pojemność wejściową układu pomiarowego dzięki temu przebiegi cyfrowe są mniej zakłócane przez pomiar c) powoduje znaczące zmniejszenie pasma przepustowego oscyloskopu dlatego nie powinna być stosowana w przypadku szybkozmiennych układów cyfrowych
 Sonda oscyloskopowa: a) składa się z dzielnika rezystancyjnego oraz pojemnościowego, podział napięcia tych dzielników jest taki sam b) zwiększa rezystancję i zmniejsza pojemność wejściową układu pomiarowego dzięki temu przebiegi cyfrowe są mniej zakłócane przez pomiar c) powoduje znaczące zmniejszenie pasma przepustowego oscyloskopu dlatego nie powinna być stosowana w przypadku szybkozmiennych układów cyfrowych")
42
22) Sonda oscyloskopowa:
 Sonda oscyloskopowa:")
43
Przy spe ł nionym warunku równo ś ci odpowiedzi na „czo ł o i grzbiet” impulsu otrzymujemy: st ą d po przekszta ł ceniach: Zatem je ś li spe ł niony jest wyżej wymieniony warunek w ó wczas skok napi ę ciowy na wej ś ciu jest przenoszony na wyj ś cie uk ł adu ze strat ą amplitudy, ale bez zniekszta ł ce ń. Przyk ł adem zastosowania opisanego dzielnika skompensowanego RC jest sonda bierna, stosowana w celu zmniejszenia wp ł ywu impedancji wej ś ciowej przyrz ą dów pomiarowych (np. oscyloskop) na wynik pomiaru.
 na wynik pomiaru..")
44
23. N-bitowy przetwornik analogowo- cyfrowy. Prawdziwe są zdania: a) wartość najmniejszego kwantu Q jest proporcjonalna do 2 -N b) stosunek sygnału do szumu dla idealnego przetwornika wynosi w przybliżeniu 6N [dB] c) aby uniknąć efektu aliasingu, częstotliwość próbkowania powinna być co najmniej dwa razy większa od maksymalnej częstotliwości sygnału wejściowego
 wartość najmniejszego kwantu Q jest proporcjonalna do 2 -N b) stosunek sygnału do szumu dla idealnego przetwornika wynosi w przybliżeniu 6N [dB] c) aby uniknąć efektu aliasingu, częstotliwość próbkowania powinna być co najmniej dwa razy większa od maksymalnej częstotliwości sygnału wejściowego.")
45
23. N-bitowy przetwornik analogowo- cyfrowy. Prawdziwe są zdania:

46
24) Przetwornik flash (równoległego). Prawdziwe są zdania : a)jest to przetwornik analogowo - cyfrowy b) jest to jeden z najszybszych przetworników c) charakteryzuje się on relatywnie małą rozdzielczością (liczbą bitów) ponieważ składa się w przybliżeniu z 2 N komparatorów (gdzie N- liczba bitów)
jest to przetwornik analogowo - cyfrowy b) jest to jeden z najszybszych przetworników c) charakteryzuje się on relatywnie małą rozdzielczością (liczbą bitów) ponieważ składa się w przybliżeniu z 2 N komparatorów (gdzie N- liczba bitów).")
47
24) Przetwornik flash (równoległego). Prawdziwe są zdania :
 Przetwornik flash (równoległego). Prawdziwe są zdania :")
49
25) Standard LVDS a) umożliwia szybką transmisję danych cyfrowych b) wymaga fizycznie dwóch przewodów do transmisji pojedynczego sygnału cyfrowego c) jest stosowany tylko w układach cyfrowych zasilanych napięciem mniejszym lub równym 1V
 Standard LVDS a) umożliwia szybką transmisję danych cyfrowych b) wymaga fizycznie dwóch przewodów do transmisji pojedynczego sygnału cyfrowego c) jest stosowany tylko w układach cyfrowych zasilanych napięciem mniejszym lub równym 1V")
50
25) Standard LVDS The low common-mode voltage (the average of the voltages on the two wires) of about 1.2V allows using LVDS with a wide range of integrated circuits with power supply voltages down to 2.5V or lower. In addition, there are variations of LVDS that use a lower common mode voltage. One example is sub-LVDS (introduced by Nokia in 2004) that uses 0.9V typical common mode voltage.
 that uses 0.9V typical common mode voltage..")
51
26) Prawdziwe są zdania: a)przetwornik cyfrowo-analogowy sigma-delta podobnie jak PWM (Pulse Width Modulation) charakteryzuje się tym, że napięcie wyjściowe ma dwa stany (np. masy i V ref ) a wartość analogowa sygnału jest regulowana poprzez współczynnik wypełnienia b) przetwornik sigma-delta jest relatywnie wolnym przetwornikiem (do około 1MS/s) c) czas próbkowania sygnału wejściowego w przetworniku z podwójnym całkowaniem powinien być wielokrotnością 20ms aby zminimalizować zakłócenia sieci 50Hz
 a wartość analogowa sygnału jest regulowana poprzez współczynnik wypełnienia b) przetwornik sigma-delta jest relatywnie wolnym przetwornikiem (do około 1MS/s) c) czas próbkowania sygnału wejściowego w przetworniku z podwójnym całkowaniem powinien być wielokrotnością 20ms aby zminimalizować zakłócenia sieci 50Hz.")
52
26) Prawdziwe są zdania:
 Prawdziwe są zdania:")
55
27) Czas narastania dla układu całkującego RC, dla R=100, C=10pF wynosi: a)0.22ns b) 2.2ns c) 22ns
 Czas narastania dla układu całkującego RC, dla R=100, C=10pF wynosi: a)0.22ns b) 2.2ns c) 22ns")
56
27) Czas narastania dla układu całkującego RC, dla R=100, C=10pF wynosi: Jako czas narastania przyjmuje się czas narastania odpowiedzi na skok jednostkowy od 10% do 90% wartości amplitudy impulsu skokowego: t 10 można obliczyć ze wzoru: t 90 można obliczyć ze wzoru: t n = t 90 - t 10 2,2. τ=RC, stąd t n = 2,2*10^-9

57
28. Przetwornikami cyfrowo-analogowymi są: a) drabinka R-2R b) z podwójnym całkowaniem c) przetwornik z kompensacją wagową (ang. SAR) Rezystancyjne podzielniki napięcia Przetworniki z sumowaniem ważonych prądów (wagowy) Układy z drabinką R-2R (wagowy) Przetworniki z podziałem ładunku (wagowy) Przetworniki z drabinką C-2C (wagowy) Przetwornik z redystrybucją ładunku (szeregowy) Przetworniki potokowe (szeregowy)
 drabinka R-2R b) z podwójnym całkowaniem c) przetwornik z kompensacją wagową (ang. SAR) Rezystancyjne podzielniki napięcia Przetworniki z sumowaniem ważonych prądów (wagowy) Układy z drabinką R-2R (wagowy) Przetworniki z podziałem ładunku (wagowy) Przetworniki z drabinką C-2C (wagowy) Przetwornik z redystrybucją ładunku (szeregowy) Przetworniki potokowe (szeregowy).")
58
29. Prawdziwe są zdania: a) przetworniki cyfrowo-analogowy wymaga układu próbkująco - pamiętającego b) przetworniki cyfrowo-analogowe wymagają napięcie referencyjnego c) najwolniejszym przetwornikiem analogowo-cyfrowym jest przetwornik PWM (Pulse Width Modulation)
 przetworniki cyfrowo-analogowy wymaga układu próbkująco - pamiętającego b) przetworniki cyfrowo-analogowe wymagają napięcie referencyjnego c) najwolniejszym przetwornikiem analogowo-cyfrowym jest przetwornik PWM (Pulse Width Modulation).")
59
29. Prawdziwe są zdania:

61
30. Prawdziwe są zdania: a)kondensatory w pobliżu układów cyfrowych są stosowane aby wyeliminować zjawisko wyścigu b) osobna masa analogowa i cyfrowa przetworników analogowo-cyfrowych jest stosowana tylko wtedy kiedy występuje różnica poziomów napięć pomiędzy tymi masami c) komparator, to układ który porównuje dwa sygnały analogowe lub cyfrowe, przy czym komparator cyfrowy jest zbudowany zupełnie inaczej niż komparator analogowy
kondensatory w pobliżu układów cyfrowych są stosowane aby wyeliminować zjawisko wyścigu b) osobna masa analogowa i cyfrowa przetworników analogowo-cyfrowych jest stosowana tylko wtedy kiedy występuje różnica poziomów napięć pomiędzy tymi masami c) komparator, to układ który porównuje dwa sygnały analogowe lub cyfrowe, przy czym komparator cyfrowy jest zbudowany zupełnie inaczej niż komparator analogowy.")
62
30. Prawdziwe są zdania: Niekiedy zachodzi potrzeba rozdzielenia masy cyfrowej i analogowej lub masy zasilania i masy sygnału. Wszystko po to, żeby zapobiec przedostawaniu się szumów z zasilania do sygnału. Odseparowanie mas przetwornika od reszty układu ma również funkcję zabezpieczającą przed uszkodzeniem całego układu.

63
30. Prawdziwe są zdania: Komparator analogowy porównuje napięcia (lub prądy) przyłożone do wejść, a na wyjściu podaje sygnał zależny od tego, który z sygnałów wejściowych jest większy. Komparatory wykonuje się w oparciu o wzmacniacze operacyjne. Komparator Cyfrowy -Jedynka na jednym z trzech wyjść komparatora informuje, w jakiej relacji względem siebie (mniejsze, równe, większe) są liczby podawane na jego wejścia.
 przyłożone do wejść, a na wyjściu podaje sygnał zależny od tego, który z sygnałów wejściowych jest większy. Komparatory wykonuje się w oparciu o wzmacniacze operacyjne. Komparator Cyfrowy -Jedynka na jednym z trzech wyjść komparatora informuje, w jakiej relacji względem siebie (mniejsze, równe, większe) są liczby podawane na jego wejścia..")
Podobne prezentacje